См. Документы Министерства транспорта Российской Федерации
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ
ПРИКАЗ
от 12 июля 2019 г. N 229
ОБ УТВЕРЖДЕНИИ ФЕДЕРАЛЬНЫХ АВИАЦИОННЫХ ПРАВИЛ
"ТРЕБОВАНИЯ К ТРЕНАЖЕРНЫМ УСТРОЙСТВАМ ИМИТАЦИИ ПОЛЕТА,
ПРИМЕНЯЕМЫМ В ЦЕЛЯХ ПОДГОТОВКИ И КОНТРОЛЯ ПРОФЕССИОНАЛЬНЫХ
НАВЫКОВ ЧЛЕНОВ ЛЕТНЫХ ЭКИПАЖЕЙ ГРАЖДАНСКИХ ВОЗДУШНЫХ СУДОВ"
В соответствии с пунктом 6 статьи 54 Воздушного кодекса Российской Федерации (Собрание законодательства Российской Федерации, 1997, N 12, ст. 1383; 2012, N 31, ст. 4318; 2018, N 32, ст. 5135), подпунктом 5.2.53.8 пункта 5 Положения о Министерстве транспорта Российской Федерации, утвержденного постановлением Правительства Российской Федерации от 30 июля 2004 г. N 395 (Собрание законодательства Российской Федерации, 2004, N 32, ст. 3342; 2006, N 24, ст. 2601, N 52, ст. 5587; 2008, N 8, ст. 740, N 11, ст. 1029, N 17, ст. 1883, N 22, ст. 2576, N 42, ст. 4825, N 46, ст. 5337; 2009, N 3, ст. 378, N 4, ст. 506, N 6, ст. 738, N 13, ст. 1558, N 18, ст. 2249, N 32, ст. 4046, N 33, ст. 4088, N 36, ст. 4361, N 51, ст. 6332; 2010, N 6, ст. 650, 652, N 11, ст. 1222, N 12 ст. 1348, N 13, ст. 1502, N 15, ст. 1805, N 25, ст. 3172, N 26, ст. 3350, N 31, ст. 4251; 2011, N 14, ст. 1935, N 26, ст. 3801, 3804, N 32, ст. 4832, N 38, ст. 5389, N 46, ст. 6526, N 47, ст. 6660, N 48, ст. 6922; 2012, N 6, ст. 686, N 14, ст. 1630, N 19, ст. 2439, N 44, ст. 6029, N 49, ст. 6881; 2013, N 5, ст. 388, N 12, ст. 1322, N 26, ст. 3343, N 33, ст. 4386, N 38, ст. 4821, N 45, ст. 5822; 2014, N 12, ст. 1286, N 18, ст. 2177, N 30, ст. 4311, ст. 4325, N 37, ст. 4974, N 42, ст. 5736, N 43, ст. 5901, N 43, ст. 5926; 2015, N 2, ст. 491, N 16, ст. 2394, N 17, ст. 2571, N 20, ст. 2925, N 38, ст. 5300, N 47, ст. 6605, N 49, ст. 6976; 2016, N 1, ст. 242, N 2, ст. 325, N 7, ст. 996, N 7, ст. 997, N 16, ст. 2229, N 28, ст. 4741, N 37, ст. 5497, N 40, ст. 5752, N 42, ст. 5929; 2017, N 10, ст. 1485, N 37, ст. 5539, N 42, ст. 6166, N 43, ст. 6327, N 52, ст. 8161; 2018, N 24, ст. 3533, N 52, ст. 8275; 2019, N 1, ст. 10, N 12 ст. 1310), приказываю:
1. Утвердить прилагаемые Федеральные авиационные правила "Требования к тренажерным устройствам имитации полета, применяемым в целях подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов".
2. Настоящий приказ вступает в силу по истечении 90 дней после официального опубликования.
И.о. Министра
В.А.ТОКАРЕВ
Приложение
к приказу Минтранса России
от 12 июля 2019 г. N 229
ФЕДЕРАЛЬНЫЕ АВИАЦИОННЫЕ ПРАВИЛА
"ТРЕБОВАНИЯ К ТРЕНАЖЕРНЫМ УСТРОЙСТВАМ ИМИТАЦИИ ПОЛЕТА,
ПРИМЕНЯЕМЫМ В ЦЕЛЯХ ПОДГОТОВКИ И КОНТРОЛЯ ПРОФЕССИОНАЛЬНЫХ
НАВЫКОВ ЧЛЕНОВ ЛЕТНЫХ ЭКИПАЖЕЙ ГРАЖДАНСКИХ ВОЗДУШНЫХ СУДОВ"
1. Федеральные авиационные правила "Требования к тренажерным устройствам имитации полета, применяемым в целях подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов" (далее - Правила) разработаны в соответствии с пунктом 6 статьи 54 Воздушного кодекса Российской Федерации (Собрание законодательства Российской Федерации, 1997, N 12, ст. 1383; 2012, N 31, ст. 4318; 2018, N 32, ст. 5135), подпунктом 5.2.53.8 пункта 5 Положения о Министерстве транспорта Российской Федерации, утвержденного постановлением Правительства Российской Федерации от 30 июля 2004 г. N 395 (Собрание законодательства Российской Федерации, 2004, N 32, ст. 3342; 2006, N 24, ст. 2601, N 52, ст. 5587; 2008, N 8, ст. 740, N 11, ст. 1029, N 17, ст. 1883, N 22, ст. 2576, N 42, ст. 4825, N 46, ст. 5337; 2009, N 3, ст. 378, N 4, ст. 506, N 6, ст. 738, N 13, ст. 1558, N 18, ст. 2249, N 32, ст. 4046, N 33, ст. 4088, N 36, ст. 4361, N 51, ст. 6332; 2010, N 6, ст. 650, 652, N 11, ст. 1222, N 12 ст. 1348, N 13, ст. 1502, N 15, ст. 1805, N 25, ст. 3172, N 26, ст. 3350, N 31, ст. 4251; 2011, N 14, ст. 1935, N 26, ст. 3801, 3804, N 32, ст. 4832, N 38, ст. 5389, N 46, ст. 6526, N 47, ст. 6660, N 48, ст. 6922; 2012, N 6, ст. 686, N 14, ст. 1630, N 19, ст. 2439, N 44, ст. 6029, N 49, ст. 6881; 2013, N 5, ст. 388, N 12, ст. 1322, N 26, ст. 3343, N 33, ст. 4386, N 38, ст. 4821, N 45, ст. 5822; 2014, N 12, ст. 1286, N 18, ст. 2177, N 30, ст. 4311, ст. 4325, N 37, ст. 4974, N 42, ст. 5736, N 43, ст. 5901, N 43, ст. 5926; 2015, N 2, ст. 491, N 16, ст. 2394, N 17, ст. 2571, N 20, ст. 2925, N 38, ст. 5300, N 47, ст. 6605, N 49, ст. 6976; 2016, N 1, ст. 242, N 2, ст. 325, N 7, ст. 996, N 7, ст. 997, N 16, ст. 2229, N 28, ст. 4741, N 37, ст. 5497, N 40, ст. 5752, N 42, ст. 5929; 2017, N 10, ст. 1485, N 37, ст. 5539, N 42, ст. 6166, N 43, ст. 6327, N 52, ст. 8161; 2018, N 24, ст. 3533, N 52, ст. 8275; 2019, N 1, ст. 10, N 12 ст. 1310).
2. Настоящие Правила устанавливают требования к тренажерным устройствам имитации полета, используемым в целях подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов (далее - тренажер).
Сокращения, используемые в настоящих Правилах, определены в приложении N 3 к настоящим Правилам.
3. Тренажер должен обеспечивать уровни имитации условий полета и работы систем воздушного судна (далее - уровень имитации характеристик), приведенные в таблице 1 приложения N 1 к настоящим Правилам.
4. Тип тренажера определяется по уровню имитации характеристик:
1) Для тренажера самолета:
а) Моделирование самолета:
кабина летного экипажа - компоновка и конструкция;
модель полета (аэродинамика и двигатель);
управление самолетом при движении на земле;
системы самолета;
рычаги управления самолетом и усилия на них.
б) Моделирование эффектов:
акустические эффекты;
визуальные эффекты;
акселерационные эффекты.
в) Моделирование окружающей обстановки:
управление воздушным движением - УВД;
навигация;
метеоусловия;
аэропорты и прилегающая местность.
2) Для тренажера вертолета:
а) Моделирование вертолета:
кабина летного экипажа - компоновка и конструкция;
модель полета (аэродинамика и двигатель);
управление вертолетом при движении на земле;
системы вертолета;
рычаги управления и усилия на них.
б) Моделирование эффектов:
акустические эффекты;
визуальные эффекты;
вибрационные эффекты;
акселерационные эффекты.
в) Моделирование окружающей обстановки:
навигация;
метеоусловия;
посадочные площадки и прилегающая местность;
управление воздушным движением - УВД.
5. Типы тренажеров, а также виды подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов, определяемые по уровню имитации характеристик, приведены в таблице 2 для тренажеров самолетов и в таблице 3 для тренажеров вертолетов приложения N 1 к настоящим Правилам.
6. Тренажер должен соответствовать одному из указанных в настоящих Правилах типов тренажеров.
7. Требования к тренажерам содержатся в приложении N 2 к настоящим Правилам:
минимальные требования к составу тренажеров и их характеристикам для каждого типа тренажера самолета и вертолета содержатся в таблицах A1 и A2 приложения N 2 к настоящим Правилам, соответственно;
требования к допустимым значениям (далее - допуски), имитируемых тренажерами характеристик, измеряемых техническими средствами, содержатся в таблицах B1 и B2 приложения N 2 к настоящим Правилам соответственно;
требования к техническим средствам, в том числе к средствам измерения, и методам измерения значений, имитируемых тренажерами характеристик, содержатся в таблицах B1 и B2 приложения N 2 к настоящим Правилам соответственно;
критерии летных оценок на соответствие типу тренажеров самолетов и вертолетов содержатся в таблицах C1 и C2 приложения N 2 к настоящим Правилам соответственно.
Приложение N 1
к Федеральным авиационным правилам
"Требования к тренажерным устройствам
имитации полета, применяемым в целях
подготовки и контроля профессиональных
навыков членов летных экипажей
гражданских воздушных судов",
утвержденным приказом Минтранса России
от 12 июля 2019 г. N 229
Таблица 1
Уровни имитации условий полета и работы систем
воздушного судна
(Уровни имитации характеристик)
|
Уровень
|
Моделирование воздушного судна
|
Моделирование эффектов
|
Моделирование окружающей обстановки
|
|
1
|
2
|
3
|
4
|
|
Уровни имитации характеристик самолета
|
|||
|
Не требуется
|
Не требуется
|
Не требуется
|
Не требуется
|
|
Базовый
|
Не относится к определенной модели, типу или модификации самолета
|
Моделирование эффектов, характерных для определенного класса самолетов
|
Моделирование характеристик окружающей обстановки, позволяющее определить пространственное положение самолета
|
|
Для визуальных эффектов - воспроизведение визуальной обстановки с перспективой, достаточной для обеспечения перехода от пилотирования по приборам к визуальному полету при выполнении заходов на посадку с прямой по приборам
|
|||
|
Моделирование акустических эффектов производится по заданным параметрам звукового давления, входящих в состав утвержденного набора акустических и акселерационных данных в составе пакета исходных данных, полученных в ходе изготовления и испытаний воздушного судна (далее - ПИД) в диапазоне частот не уже, чем от 200 до 5000 Гц и с уровнем звука А до 80 дБА
|
|||
|
Типовой
|
Для модели самолета определенного класса (самолет с одним двигателем, сухопутный, гидросамолет с одним двигателем, самолет многодвигательный, сухопутный, гидросамолет многодвигательный)
|
Имитация акустических эффектов производится по заданным параметрам звукового давления, входящих в состав утвержденного набора акустических и акселерационных данных в составе ПИД для данного класса самолетов, в диапазоне частот не уже, чем от 120 до 8000 Гц и с уровнем звука А до 85 дБА
|
Моделирование условий окружающей обстановки, позволяющее определить пространственное положение самолета, и включающее моделирование времени суток и погодных условий
|
|
Имитация акселерационных эффектов производится по заданным параметрам ускорения, входящих в состав утвержденного набора акустических и акселерационных данных в составе ПИД для данного класса самолета
|
|||
|
Может не соответствовать конкретному типу самолета данного класса
|
|||
|
Визуальные условия реальной окружающей обстановки и перспективы
|
|||
|
Высокий
|
Для модели самолета конкретного типа
|
Имитация акустических эффектов производится по заданным параметрам звукового давления, входящих в состав утвержденного набора акустических данных в составе ПИД для соответствующего типа самолета, в диапазоне частот не уже, чем от 80 до 10000 Гц и с уровнем звука А до 90 дБА
|
Имитируются условия реальной окружающей обстановки в конкретном месте
|
|
Имитация акселерационных эффектов производится по заданным параметрам ускорения, входящих в состав утвержденного набора акселерационных данных в составе ПИД для соответствующего типа ВС
|
|||
|
Применимо только к визуальным эффектам. Имитируются визуальные условия реальной окружающей обстановки и бесконечная перспектива
|
|||
|
Уровни имитации характеристик вертолета
|
|||
|
Не требуется
|
Не требуется
|
Не требуется
|
Не требуется
|
|
Базовый
|
Не относится к определенной модели, типу или модификации вертолета
|
Моделирование эффектов, характерных для вертолетов определенной группы
|
Моделирование условий окружающей обстановки, позволяющее определить пространственное положение вертолета
|
|
Для визуальных эффектов воспроизводится визуальная обстановка с перспективой, достаточной для обеспечения перехода от пилотирования по приборам к визуальному полету при выполнении заходов на посадку с прямой по приборам
|
|||
|
Моделирование акустических эффектов производится по заданным параметрам звукового давления, входящих в состав утвержденного набора акустических и акселерационных данных в составе ПИД для вертолетов соответствующей группы, в диапазоне частот не уже, чем от 160 до 5000 Гц и с уровнем звука А до 80 дБА
|
|||
|
Моделирование акселерационных эффектов производится по заданным параметрам ускорения, входящих в состав утвержденного набора акселерационных данных в составе ПИД
|
|||
|
Типовой
|
Для модели вертолета определенной группы (конструктивной схемы)
|
Моделирование акустических эффектов производится по заданным параметрам звукового давления, входящих в состав утвержденного набора акустических и акселерационных данных в составе ПИД для вертолетов соответствующей группы в диапазоне частот не уже, чем от 80 до 6000 Гц и с уровнем звука А до 87 дБА
|
Моделирование условий окружающей обстановки, позволяющее определить пространственное положение вертолета, и включающее моделирование времени суток и погодных условий
|
|
Может не соответствовать конкретному типу вертолета
|
|||
|
Для акселерационных эффектов производится по заданным параметрам ускорения, входящих в состав утвержденного набора акселерационных данных в составе ПИД для вертолетов соответствующей группы
|
|||
|
Для визуальных эффектов воспроизводятся визуальные условия реальной окружающей обстановки и перспективы
|
|||
|
Высокий
|
Имитируется конкретный тип вертолета
|
Моделирование акустических эффектов производится по заданным параметрам звукового давления, входящих в состав утвержденного набора акустических и акселерационных данных в составе ПИД для соответствующего типа вертолета в диапазоне частот не уже, чем от 40 до 8000 Гц и с уровнем звука А до 96 дБА
|
Имитируются условия реальной окружающей обстановки в конкретном месте
|
|
Моделирование акселерационных эффектов - производится по заданным параметрам ускорения, входящих в состав утвержденного набора акселерационных данных в составе ПИД для соответствующего типа вертолета
|
|||
|
Для визуальных эффектов моделируются визуальные условия реальной окружающей обстановки и бесконечная перспектива
|
|||
Таблица 2 <*>
Уровни имитации условий полета и работы систем воздушного
судна тренажеров самолетов и виды подготовки по типам
тренажеров самолетов (Уровни имитации характеристик)
|
Тип тренажера
|
Виды подготовки и контроля гражданских профессиональных воздушных судов навыков членов летных экипажей
|
Подготовка (Т) или профподготовка (ТР)
|
Кабина летного экипажа - компоновка и конструкция
|
Модель полета (аэродинамика и двигатель)
|
Управление самолетом при движении по земле
|
Системы самолета
|
Рычаги управления самолетом и усилия на них
|
Акустические эффекты
|
Визуальные эффекты
|
Акселерационные эффекты
|
Управление воздушным движением - УВД
|
Навигация
|
Метеоусловия
|
Аэропорты и прилегающая местность
|
|
УРОВНИ СООТВЕТСТВИЯ ХАРАКТЕРИСТИК ТРЕНАЖЕРА
|
||||||||||||||
|
Тип VII, Тип D
|
MPL 4
|
Т + ТР
|
S
|
S
|
S
|
S
|
S
|
S
|
S
|
R
|
S
|
S
|
R
|
R
|
|
TR/ATPL
|
ТР
|
|||||||||||||
|
Re
|
Т
|
|||||||||||||
|
RL/RO/IO/CQ
|
ТР
|
|||||||||||||
|
Тип VI
|
MPL 3
|
Т
|
R
|
R
|
R
|
R
|
R
|
S
|
S
|
R
|
S
|
S
|
R
|
R
|
|
Тип V
|
TR/ATPL/RL/RO/IO
|
Т
|
S
|
S
|
S
|
S
|
S
|
S
|
R
|
N
|
G
|
S
|
R
|
R
|
|
Тип IV
|
MPL 2
|
Т
|
R
|
G
|
G
|
R
|
G
|
R
|
G
|
N
|
G
|
S
|
G
|
R
|
|
Тип III
|
CR
|
Т
|
R
|
R
|
R
|
R
|
R
|
R
|
R
|
N
|
N
|
S
|
G
|
G
|
|
Тип II
|
IR
|
Т
|
G
|
G
|
G
|
R
|
G
|
G
|
G
|
N
|
G
|
S
|
G
|
G
|
|
Тип 1
|
CPL
|
Т
|
R
|
R
|
R
|
R
|
R
|
G
|
R
|
N
|
N
|
S
|
G
|
G(S)
|
|
MPL 1
|
Т
|
R
|
R
|
R
|
R
|
R
|
G
|
G
|
N
|
N
|
S
|
G
|
G
|
|
|
PPL
|
Т
|
R
|
R
|
R
|
R
|
R
|
G
|
R
|
N
|
N
|
S
|
G
|
R(S)
|
|
Таблица 3 <*>
Уровни имитации условий полета и работы систем воздушного
судна тренажеров вертолетов и виды подготовок по типам
тренажеров вертолетов (Уровни имитации характеристик)
|
Тип тренажера
|
Свидетельства и виды подготовок
|
Подготовка (Т) или профподготовка (ТР)
|
Кабина летного экипажа - компоновка и конструкция
|
Модель полета (аэродинамика и двигатель)
|
Управление вертолетом при движении по земле
|
Системы вертолета
|
Рычаги управления вертолета и усилия на них
|
Акустические эффекты
|
Визуальные эффекты
|
Вибрационные эффекты
|
Акселерационные эффекты
|
Посадочные площадки и прилегающая местность
|
Навигация
|
Метеоусловия
|
Управление воздушным движением - УВД
|
|
УРОВНИ СООТВЕТСТВИЯ ХАРАКТЕРИСТИК ТРЕНАЖЕРА
|
|||||||||||||||
|
Тип V
|
ATPL/IR(R)/TR(I)/RL/Re
|
Т + ТР
|
S
|
S
|
S
|
S
|
S
|
S
|
S
|
S
|
R
|
S
|
S
|
S
|
G
|
|
PPL/CPL/IR(I)
|
Т
|
||||||||||||||
|
Тип IV
|
IR(R)
|
Т + ТР
|
S
|
S
|
S
|
S
|
S
|
S
|
S
|
S
|
R <**>
|
S
|
S
|
S
|
G
|
|
ATPL/PPL/CPL/IR(I)/TR(I)/RL
|
Т
|
||||||||||||||
|
Тип III
|
ATPL/PPL/CPL/IR(I)/TR(I)/RL
|
Т
|
S
|
S
|
S
|
S
|
S
|
R
|
S
|
R
|
N
|
S
|
S
|
S
|
G
|
|
Тип II
|
ATPL/PPL/CPL/IR(I)/IR(R)/TR(I)
(для тренировок по ПВП)
|
Т
|
R
|
R
|
G
|
R
|
R
|
G
|
S
|
G
|
N
|
S
|
R
|
R
|
G
|
|
Тип I
|
IR(I)/IR(R)
(для тренировок по правилам полетов по приборам (далее - ППП))
|
Т
|
R
|
R
|
G
|
R
|
R
|
G
|
G
|
G
|
N
|
S
|
G
|
G
|
G
|
--------------------------------
<*> Высокий уровень имитации характеристик - S;
типовой уровень имитации характеристик - R;
базовый уровень имитации характеристик - G;
не требуется оценки уровня имитации характеристик - N.
<**> Пилот получает эффективные и характерные акселерационные воздействия и задающие сигналы, которые обеспечивают соответствующие ощущения ускорения по 6 степеням свободы вертолета. Акселерационные воздействия должны обеспечивать правильное ощущение у пилота. Ощущение движения может быть меньше чем на вертолете, если реальные ощущения не требуются программами подготовки.
Приложение N 2
к Федеральным авиационным правилам
"Требования к тренажерным устройствам
имитации полета, применяемым в целях
подготовки и контроля профессиональных
навыков членов летных экипажей
гражданских воздушных судов",
утвержденным приказом
Минтранса России
от 12 июля 2019 г. N 229
Таблица A1
1. Кабина летного экипажа - компоновка и конструкция:
|
1.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК КОМПОНОВКИ И КОНСТРУКЦИИ КАБИНЫ ЛЕТНОГО ЭКИПАЖА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
1.S
|
Закрытая полномасштабная точная копия кабины летного экипажа самолета с полностью функционирующими рычагами управления самолетом, приборами и переключателями.
Нет необходимости, чтобы элементы, к которым не требуется доступ членам летного экипажа для выполнения штатных, нештатных, аварийных, и если это применимо, особых процедур и операций, были функционирующими
|
|||||||||
|
1.R
|
Закрытая или воспринимаемая как закрытая кабина летного экипажа, исключающая возможность отвлечения внимания, которая является типовой для моделируемого самолета и соответствует классу моделируемых самолетов
|
|||||||||
|
1.G
|
Открытая, закрытая или воспринимаемая как закрытая кабина летного экипажа, исключающая возможность отвлечения внимания, которая является типовой для моделируемого самолета и соответствует классу моделируемых самолетов
|
+
|
||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК КОМПОНОВКИ И КОНСТРУКЦИИ КАБИНЫ ПИЛОТА (ЛЕТНОГО ЭКИПАЖА)
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
1.1
|
КОНСТРУКЦИЯ КАБИНЫ ЛЕТНОГО ЭКИПАЖА
|
|||||||||
|
1.1.S.a
|
Закрытая полномасштабная точная копия кабины летного экипажа моделируемого самолета
|
+
|
+
|
|||||||
|
1.1.S.b
|
Закрытая полномасштабная точная копия кабины летного экипажа моделируемого самолета, за исключением того, что ограждение кабины должно простираться только до задней стенки кабины летного экипажа
|
+
|
||||||||
|
1.1.S.c
|
Закрытая полномасштабная точная копия кабины летного экипажа моделируемого самолета, включая все элементы: конструкции и приборные доски, основные и вспомогательные рычаги управления самолетом, рычаги управления двигателем или воздушным винтом, если это применимо, оборудование и системы с соответствующими органами управления и индикаторами, автоматы защиты сети, пилотажные приборы, навигационное, связное и другое аналогичное оборудование, системы сигнализации и оповещения, а также аварийное оборудование. Тактильные ощущения, прилагаемые усилия, ход и направление перемещений рычагов управления, указанными выше элементами, должны быть точно такими, как и на реальном самолете
|
+
|
+
|
+
|
Оборудование кабины экипажа либо функции, не используемые в программах подготовки пилотов, не обязательно должны быть функционирующими, но любое видимое оборудование и соответствующие органы управления и переключатели должны быть установлены
|
|||||
|
Если оборудование кабины экипажа задействуется при выполнении каких-либо штатных, нештатных или аварийных процедур, должно обеспечиваться их функционирование в такой степени, чтобы точно имитировалось поведение самолета в процессе реализации этих процедур. Оборудование кабины экипажа или его отдельные функции, имитация работы которых не обеспечивается тренажером в полном объеме, должны указываться в информационном листе тренажера
|
||||||||||
|
В зависимости от требований может устанавливаться оборудование для оперирования окнами кабины летного экипажа, хотя не обязательно, чтобы сами окна были действительно функционирующими
|
||||||||||
|
Перегородки, в которых есть только отсеки для хранения чек (штырей) шасси, и на которых размещаются только пожарные топоры или огнетушители, запасные лампы, сумки для самолетной документации, не устанавливаются, если использование указанного оборудование не предусмотрено программой подготовки
|
||||||||||
|
Дополнительные рабочие места членов летного экипажа, а также перегородки сзади кресел пилотов вместе с расположенными на них переключателями, автоматами защиты сети (далее - АЗС), дополнительными радиопанелями, доступ к которым членам летного экипажа может потребоваться, также считаются неотъемлемой частью кабины летного экипажа и должны точно копировать реальный самолет
|
||||||||||
|
Должны быть в наличии все элементы и предметы, необходимые для выполнения программы подготовки пилотов, включая те, которые требуются для выполнения контрольного перечня предполетных операций, однако они могут быть перемещены в удобные для них места, но расположенные как можно ближе к их первоначальным положениям. Копия элементов аварийного оборудования, макет или даже фотография, считаются приемлемыми, при условии, что они являются функционирующими в той степени, которая требуется для осуществления программы подготовки пилотов
|
||||||||||
|
Имеющиеся на самолете кресла наблюдателей не считаются дополнительными рабочими местами членов летного экипажа и могут отсутствовать в тренажерном устройстве.
|
||||||||||
|
При моделировании условий полета в кабине летного экипажа должно имитироваться все пространство перед поперечным сечением фюзеляжа в самом заднем положении кресел членов летного экипажа, либо, если это применимо, перед поперечным сечением, расположенным непосредственно позади кресла дополнительного члена летного экипажа и (или) перед перегородками
|
Допускается использование воспроизводимых на электронных дисплеях изображений с наложением физических накладок и имитации приборов и (или) приборных досок тренажера, при условии, что:
для типа V:
все компоновки приборов и приборных досок по размерам являются точными копиями компоновок на реальном самолете, причем любые различия, при наличии таковых, неразличимы для пилота;
приборы, а также их функции и встроенные логические схемы являются точными копиями самолетных приборов;
воспроизводимые на дисплеях показания приборов характеризуются непрерывными показаниями (отсутствует различимая дискретность);
характеристики приборных дисплеев точно повторяют характеристики имитируемых приборов самолета, включая разрешающую способность, цвета, подсветку, яркость, шрифты, шаблоны заливок, типы линий и символы;
накладки или маски, включая посадочные места приборов и подвижные индексы, если применимо, являются точной копией приборных панелей самолета;
рычаги управления и переключатели являются точными копиями самолетных рычагов управления и переключателей и функционируют точно так же, с приложением таких же усилий и с соблюдением тех же направлений, как и на самолете;
подсветка приборов точно такая же, как и на самолете и регулируется с помощью соответствующих рычагов управления подсветкой, и, если это применимо, должна быть на уровне, соразмерном освещению других приборов, подсветка которых регулируется с помощью того же рычага управления;
если применимо, приборы имеют лицевые панели, которые являются точными копиями самолетных;
|
|||||||||
|
для типа VII:
все то же самое, что было указано выше для типа V, а также дополнительно:
изображение на экране дисплея любого трехмерного прибора, должно восприниматься, как имеющее ту же самую трехмерную глубину, как и у моделируемого самолетного прибора. Внешний вид моделируемого прибора при рассмотрении под любым углом должен быть точной копией реального самолетного прибора.
Любые неточности в показаниях прибора, обусловленные углом зрения и параллаксом, имеющимся в реальном самолетном приборе, должны также точно воспроизводиться в изображении на экране дисплея моделируемого прибора
|
||||||||||
|
1.1.R
|
Закрытая или воспринимаемая как закрытая типовая в пространственном отношении кабина моделируемого самолета или класса моделируемых самолетов, включающая в себя следующие типовые элементы: основные и вспомогательные рычаги управления самолетом, рычаги управления двигателем или воздушным винтом, если это применимо, системы, оборудование и соответствующие органы управления, АЗС, пилотажные приборы, навигационное и связное оборудование, системы предупреждения и оповещения. Приемы, усилия, величины и направления перемещений рычагов управления, перечисленными выше системами и оборудованием, должны быть типовыми для моделируемого самолета или класса моделируемых самолетов
|
+ <1>
|
+
|
+
|
+
|
Допустимо воспроизведение на тренажере приборов и/или приборных досок в форме электронных изображений на экране дисплеев с наложением физических накладок или масок, и с применением функционирующих рычагов управления, являющихся типовыми для моделируемого самолета. Воспроизводимые на экране дисплея изображения приборов не должны иметь видимой ступенчатости
|
||||
|
Должны воспроизводиться типовые панели АЗС (допускаются фотографические изображения), причем они должны иметь типовое расположение. Функционально точно необходимо имитировать только те АЗС, которые используются при выполнении штатных, нештатных или аварийных процедур, причем эти АЗС моделируются в типовой форме для класса имитируемых самолетов.
|
||||||||||
|
Закрытая часть кабины летного экипажа должна быть типовой только для моделируемого самолета или класса моделируемых самолетов и должна быть оборудована окнами. Закрытая часть должна продолжаться только до задней стенки кабины летного экипажа
|
||||||||||
|
Учитывая требование о наличии типовой только в пространственном отношении кабины пилота (летного экипажа), физические размеры закрытой части кабины могут быть такими, чтобы можно было моделировать более чем один самолет или класс самолетов, в случае реконфигурируемого тренажера. Каждое переоборудование тренажера должно оставаться типовым для соответствующего моделируемого самолета или класса моделируемых самолетов, что может потребовать замены некоторых рычагов управления, приборов, панелей, масок при изменении конфигураций
|
||||||||||
|
<1> Если тренажер используется для подготовки к полетам по правилам визуальных полетов (далее - ПВП), то он должен моделировать тип самолета или класс моделируемых самолетов, используемых для летной подготовки
|
||||||||||
|
1.1.G
|
Открытая, закрытая или воспринимаемая как закрытая зона кабины летного экипажа с аналогичными с самолетными основными и вспомогательными рычагами управления самолетом, рычагами управления двигателем или воздушным винтом (если это применимо), оборудованием, системами, приборами и соответствующими органами управления, смонтированными в пространственной конфигурации, аналогичной моделируемому самолету или классу моделируемых самолетов. Положения панелей пилотажных приборов и кресел членов летного экипажа должны обеспечивать типовые положения тела членов летного экипажа, когда они оперируют рычагами управления, и типовое расчетное положение их глаз
|
+
|
Установленные компоненты должны быть совместимыми и функционировать согласованно
|
|||||||
|
Допустимо использование электронных изображений приборов авиационного тренажера и (или) панелей приборов на экранах дисплеев с установкой или без установки физических накладок или масок. Если во время тренировок от пилота требуются входные воздействия, то должны воспроизводиться функционирующие рычаги управления. Воспроизводимые на экране дисплея приборы не должны характеризоваться наличием квантования (ступенчатости)
|
||||||||||
|
Должны воспроизводиться только те АЗС, которые используются при выполнении штатных, нештатных или аварийных процедур. При этом они должны быть смоделированы в аналогичной имитируемому самолету форме и быть функционально точными
|
||||||||||
|
Если тренажер используется для прохождения летной подготовки по ПВП, то он должен быть оборудован моделью противобликового козырька, который обеспечивает для члена (членов) летного экипажа типовое расчетное положение их глаз, сопоставимое с реальным самолетом, используемым для обучения
|
||||||||||
|
Если тренажер является конвертируемым, то некоторые органы управления могут меняться в случае переоборудования
|
||||||||||
|
1.2
|
РАЗМЕЩЕНИЕ КРЕСЕЛ
|
|||||||||
|
1.2.1.S
|
Кресла членов экипажа должны быть точными копиями кресел моделируемого самолета
|
+
|
+
|
+
|
||||||
|
1.2.1.R
|
Кресла членов экипажа должны воспроизводить кресла моделируемого самолета
|
+
|
+
|
+
|
+
|
|||||
|
1.2.1.G
|
Кресла членов экипажа должны обеспечивать для членов летного экипажа типовое расчетное положение их глаз и допускать его корректировку в требуемых пределах, чтобы сидящий в кресле член экипажа мог занять правильное положение относительно рычагов управления, характерное для моделируемого самолета или класса моделируемых самолетов
|
+
|
||||||||
|
1.2.2.S.a
|
Кроме кресел для членов летного экипажа должно быть еще одно рабочее место для инструктора, а также два подходящих кресла для наблюдателя и инспектора уполномоченного органа. Расположение, по крайней мере, одного из этих кресел, должно обеспечивать адекватный обзор приборных досок пилота и лобовых стекол
|
+
|
+
|
Уполномоченный орган по допуску тренажеров (далее - уполномоченный орган) может рассмотреть различные варианты данного требования с учетом индивидуальных особенностей конфигурации кабины пилота (летного экипажа)
Кресла на тренажерном устройстве не обязательно должны быть такими же, как кресла в реальном самолете, однако они должны быть надлежащим образом закреплены и оборудованы соответствующими ограничительными устройствами, которые в совокупности должны ограничивать движения сидящих в креслах людей в целях их безопасности во время любых известных или прогнозируемых перемещений системы подвижности
|
||||||
|
Оба кресла (для наблюдателя и инспектора) должны иметь необходимое освещение, позволяющее делать записи, и систему, обеспечивающую ведение выборочного прослушивания всех переговоров между членами летного экипажа и инструктором
|
||||||||||
|
Оба кресла должны быть достаточно удобными для сидящих в них людей, чтобы они могли без проблем сидеть в течение двухчасовой тренировки
|
||||||||||
|
1.2.2.S.b
|
Кроме кресел членов летного экипажа должно быть еще рабочее место для инструктора и два подходящих кресла для наблюдателя и инспектора уполномоченного органа
|
+
|
Как минимум одно из этих кресел должно быть оборудовано системой выборочного мониторинга всех переговоров между членами летного экипажа и инструктором
|
|||||||
|
1.2.2.R
|
Кроме кресел членов летного экипажа должно быть еще рабочее место для инструктора и два подходящих кресла для наблюдателя и инспектора уполномоченного органа
|
+
|
+
|
+
|
+
|
|||||
|
1.2.2.G
|
Кроме кресел членов летного экипажа должно быть еще рабочее место для инструктора, а также два подходящих кресла для наблюдателя и инспектора уполномоченного органа
|
+
|
||||||||
|
1.3
|
ОСВЕЩЕНИЕ КАБИНЫ ПИЛОТА/ЛЕТНОГО ЭКИПАЖА
|
|||||||||
|
1.3.S
|
Освещение кабины пилота (летного экипажа) должно быть точной копией освещения кабины реального самолета
|
+
|
+
|
+
|
||||||
|
1.3.R, G
|
Панели управления и приборов должны иметь необходимое освещение для выполняемых в кабине операций и процедур
|
+
|
+
|
+
|
+
|
+
|
||||
2. Модель полета (аэродинамика и двигатель)
|
2.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
2.S
|
Моделирование аэродинамических характеристик и двигателя для всех комбинаций сопротивления и тяги, включая эффекты изменения положения самолета, скольжения, изменения высоты, температуры, полной массы, положения центра тяжести и конфигурации
|
+
|
+
|
+
|
||||||
|
Должно учитываться влияния близости земли, числа Маха (далее - число М), факторы аэроупругости, нелинейностей, обусловленных скольжением, влияние обледенения планера, влияние прямой и реверсивной динамической тяги на управляющие поверхности
|
||||||||||
|
Должны воспроизводиться реалистичные характеристики самолета по массе, включая положение центра тяжести и моменты инерции в зависимости от полезной нагрузки и заправки топливом
|
||||||||||
|
2.R
|
Моделирование аэродинамических характеристик и двигателя по аналогии с реальным самолетом, реализованное на основе и в соответствии с классом моделируемых самолетов
|
+
|
+
|
+
|
||||||
|
Модель динамики полета, в которой учтены различные комбинации сопротивления и тяги, обычно имеющие место в полете в зависимости от реальных условий полета, включая эффекты изменения положения самолета, скольжения, тяги, сопротивления, высоты и температуры
|
||||||||||
|
2.G
|
Моделирование аэродинамических характеристик и двигателя по аналогии с реальным самолетом
|
+
|
+
|
|||||||
|
Модель динамики полета, в которой учтены различные комбинации сопротивления и тяги, обычно имеющие место в полете в зависимости от реальных условий полета, включая эффекты изменения положения самолета, скольжения, тяги, сопротивления, высоты и температуры
|
||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
2.1
|
МОДЕЛЬ ДИНАМИКИ ПОЛЕТА
|
|||||||||
|
2.1.S.a
|
Модель динамики полета, в которой учтены различные комбинации сопротивления и тяги, обычно встречающиеся в полете, определенные на основе данных летных испытаний конкретного типа самолета, включая эффекты изменения положения самолета, скольжения, тяги, сопротивления, температуры, полной массы, моментов инерции, положения центра тяжести и конфигурации
|
+
|
+
|
+
|
||||||
|
2.1.S.b
|
Моделирование аэродинамических характеристик, включая динамические эффекты прямой и реверсивной тяги, влияющие на управляющие поверхности, эффекты аэроупругости и характерные нелинейные эффекты, обусловленные боковым скольжением, на основе данных летных испытаний самолета, предоставленных изготовителем самолета
|
+
|
+
|
+
|
Требуется заявление о соответствии, удостоверяющее соответствие конкретным требованиям, заявленным эксплуатантом тренажера, согласованные и одобренные органом, осуществляющим допуск тренажера к применению (далее - ЗОС). Эффект сжимаемости (влияние числа М), характерные эффекты аэроупругости и эффекты нелинейности, обусловленные боковым скольжением, обычно включаются в модель аэродинамики на тренажере. В ЗОС должен быть рассмотрен каждый из этих эффектов
|
|||||
|
Для эффектов тяги требуется проведение отдельных испытаний и составление отдельного ЗОС
|
||||||||||
|
2.1.S.c
|
Моделирование аэродинамических характеристик, включая эффект влияния земли, осуществляется на основе данных летных испытаний самолета конкретного типа
|
+
|
+
|
+
|
Требуется ЗОС
|
|||||
|
Моделирование осуществляется на основании данных о величинах подъемной силы, сопротивления, моменте тангажа, балансировки и мощности при наличии влияния земли
|
||||||||||
|
Моделирование осуществляется для следующих участков полета: выравнивание при посадке; выравнивание перед приземлением; касание земли
|
||||||||||
|
2.1.S.d
|
Моделирование аэродинамических характеристик с учетом влияния реверсивной тяги на путевое управление
|
+
|
+
|
+
|
||||||
|
2.1.S.e
|
Моделирование с учетом влияния обледенения планера самолета, если применимо, а также аэродинамических характеристик и двигателя(ей). Модели обледенения должны имитировать эффекты ухудшения аэродинамических характеристик, обусловленные нарастанием льда на создающих подъемную силу поверхностях, включая уменьшение подъемной силы, уменьшение величины критического угла атаки, изменение момента тангажа, снижение эффективности органов управления, а также изменение усилий на рычагах управления, помимо общего увеличения сопротивления или увеличения полной массы самолета
|
+
|
+
|
+
|
Требуется ЗОС с описанием соответствующих эффектов, что позволяет организовать обучение специальным навыкам, которые необходимы для распознавания признаков обледенения и принятия соответствующих действий. ЗОС должно включать в себя подтверждение того, что проведены должные испытания этих эффектов
Имитационные модели обледенения требуются только для тех самолетов, которые имеют разрешение на выполнение полетов в условиях обледенения. Имитационные модели обледенения должны разрабатываться таким образом, чтобы обеспечивать обучение пилотов тем навыкам, которые требуются им для распознавания ситуаций с нарастанием льда и выполнения необходимых действий в таких случаях
|
|||||
|
2.1.R
|
Модель динамики полета, учитывающая различные комбинации величин сопротивления и тяги, которые обычно реализуются во время полета, включая эффект изменения положения самолета, боковое скольжение, влияние изменений тяги, сопротивления, высоты, температуры, полного веса, моментов инерции, положения центра тяжести, а также конфигурации
|
+
|
+
|
+
|
||||||
|
2.1.G
|
Моделирование характеристик, похожих на характеристики самолета, но не являющихся характеристиками самолетов конкретного класса, типа или варианта. Модель динамики полета, учитывающая различные комбинации сопротивления и тяги, которые обычно имеют место в полете и основываются на базовых данных самолета, включая эффекты изменения положения самолета, скольжения, эффекты изменений тяги, сопротивления, высоты, температуры, полного веса, моментов инерции, положения центра тяжести и конфигурации
|
+
|
+
|
|||||||
|
2.2
|
МАССОВЫЕ ХАРАКТЕРИСТИКИ
|
|||||||||
|
2.2.S
|
Массовые характеристики, соответствующие конкретному типу самолета, включая зависимости величины массы, положения центра тяжести и значений моментов инерции от полезной нагрузки и заправки топливом
|
+
|
+
|
+
|
Требуется ЗОС. Заявление о соответствии должно включать в себя ряд табулированных заданных значений, позволяющих продемонстрировать модель массовых характеристик с рабочего места инструктора
|
|||||
|
ЗОС должно включать в себя эффекты влияния колебаний уровня топлива на положение центра тяжести
|
||||||||||
|
Должно моделироваться влияние положения по тангажу и колебаний уровня топлива на положение центра тяжести самолета
|
||||||||||
3. Управление самолетом при движении на земле
|
3.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ЭФФЕКТОВ ВЛИЯНИЯ ЗЕМЛИ И ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||||
|
3.S
|
Имитируются эффекты влияния земли и характеристики управляемости самолета во время движения по поверхности аэродрома
|
+
|
+
|
+
|
|||||||
|
Динамические характеристики отказа тормозов и разрушения пневматиков (включая отказы противогазовых устройств), а также снижение эффективности тормозов должны точно соответствовать моделируемому самолету. Усилия при торможении и при путевом управлении должны быть типовыми для всех внешних условий на взлетно-посадочной полосе (далее - ВПП)
|
|||||||||||
|
3.R
|
Имитируются такие же, как и на самолете, эффекты влияния земли и характеристики управляемости, которые соответствуют и получены по определенному классу самолетов
|
+
|
+
|
+
|
|||||||
|
3.G
|
Имитируются такие же, как и на самолете, эффекты влияния земли, которые соответствуют и получены для определенного класса самолетов
|
+
|
+
|
||||||||
|
Имитируются такие же, как и на самолете, эффекты влияния земли, которые соответствуют массе и геометрии самолета
|
|||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ЭФФЕКТОВ ВЛИЯНИЯ ЗЕМЛИ И ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||||
|
3.1
|
ВЛИЯНИЕ ЗЕМЛИ И ХАРАКТЕРИСТИКИ УПРАВЛЯЕМОСТИ
|
||||||||||
|
3.1.S
|
Моделирование характеристик управляемости на земле, для конкретного типа самолета, включая следующие:
|
+
|
+
|
+
|
Требуется ЗОС. Требуется проведение испытаний
|
||||||
|
1.
|
Эффекты влияния земли. Реакция самолета при контакте с ВПП при взлете, посадке и во время движения по аэродрому, включая обжатие амортизационных стоек шасси, трение пневматиков, боковые силы, воздействия окружающей среды и другие соответствующие данные и параметры, такие как вес и скорость, необходимые для идентификации условий полета и конфигурации;
|
||||||||||
|
2.
|
Характеристики управляемости на земле. Входные управляющие воздействия должны включать в себя парирование бокового ветра, торможение, реверс тяги, замедление и радиус разворота
|
||||||||||
|
3.1.R
|
Моделирование характеристик управляемости на земле типовое для самолета, включая следующие:
|
+
|
+
|
+
|
Требуется ЗОС. Требуется проведение испытаний
|
||||||
|
1.
|
Эффекты влияния земли. Реакция самолета при контакте с ВПП при взлете, посадке и во время движения по аэродрому, включая обжатие амортизационных стоек шасси, трение пневматиков, боковые силы и другие соответствующие данные и параметры, такие как вес и скорость, необходимые для идентификации условий полета и конфигурации;
|
||||||||||
|
2.
|
Характеристики управляемости на земле. Входные управляющие воздействия должны включать в себя парирование бокового ветра, торможение, реверс тяги, замедление и радиус разворота
|
||||||||||
|
3.1.G
|
Базовые модели эффектов влияния земли и характеристик управляемости на земле, позволяющие воспроизводить эффекты контакта с ВПП с помощью системы имитации звуков и системы визуализации
|
+
|
+
|
||||||||
|
3.2
|
СОСТОЯНИЕ ВПП
|
||||||||||
|
3.2.S
|
Усилия торможения и путевого управления, по крайней мере, для следующих состояний ВПП на основе данных, полученных для самолета:
|
+
|
+
|
+
|
Требуется ЗОС
|
||||||
|
1) сухая;
2) влажная;
3) покрытая льдом;
4) местами влажная;
5) местами покрытая льдом;
6) влажная на следах резины в зоне приземления
|
|||||||||||
|
3.2.R
|
Усилия торможения и путевого управления должны быть типовыми, по крайней мере, для следующих состояний ВПП на основе данных, полученных для самолета:
1) сухая;
2) влажная
|
+
|
+
|
+
|
|||||||
|
3.2.G
|
Усилия по торможению и путевому управлению на сухой ВПП
|
+
|
+
|
||||||||
|
3.3
|
ОТКАЗ ТОРМОЗОВ И ПНЕВМАТИКОВ
|
||||||||||
|
3.3.S
|
Динамические характеристики при отказах тормозов и пневматиков (включая отказы противогазовых устройств), а также снижение эффективности торможения из-за нагрева тормозных колодок
|
+
|
+
|
+
|
Требуется ЗОС. Если применимо, требуется проведение субъективных испытаний для случаев снижения эффективности торможения из-за нагрева тормозных колодок
|
||||||
4. Системы самолета
|
4.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК СИСТЕМ САМОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
4.S
|
Системы самолета должны моделироваться с уровнем функциональности, достаточным для обеспечения действий летного экипажа
|
+
|
+
|
+
|
||||||
|
Функциональные возможности систем должны полностью обеспечивать выполнение всех штатных, нештатных и аварийных рабочих процедур
|
||||||||||
|
Связное и навигационное оборудование, а также системы предупреждения и аварийной сигнализации должны соответствовать самолетным системам и оборудованию. АЗС, необходимые для эксплуатации, должны быть функциональными
|
||||||||||
|
4.R
|
Системы самолета должны моделироваться с уровнем функциональности, достаточным для обеспечения действий летного экипажа.
|
+
|
+
|
+
|
+
|
+
|
||||
|
Функциональные возможности систем должны полностью обеспечивать выполнение всех штатных, нештатных и аварийных рабочих процедур
|
||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК СИСТЕМ САМОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
4.1
|
РАБОТА СИСТЕМ В ШТАТНЫХ, НЕШТАТНЫХ И АВАРИЙНЫХ СИТУАЦИЯХ
|
|||||||||
|
4.1.S
|
Все системы самолета, воспроизводимые на авиационном тренажере, должны точно имитировать работу систем самолета конкретного типа, включая характеристики взаимодействия систем как на земле, так и в полете. Системы должны функционировать в такой степени, чтобы можно было выполнять все штатные, нештатные и аварийные рабочие процедуры
|
+
|
+
|
+
|
Работа системы самолета должна подтверждаться и проверяться на основе данных об этой системе, представленных либо изготовителем самолета, либо изготовителем комплектного оборудования, или же на основе альтернативных данных, утвержденных для систем или компонентов самолета
|
|||||
|
После включения систем их надлежащее функционирование должно регулироваться органами управления члена летного экипажа и для этого не требуется каких-либо дополнительных команд от органов управления инструктора
|
||||||||||
|
4.1.R
|
Все системы самолета, воспроизводимые на авиационном тренажере, должны точно имитировать работу систем самолета конкретного типа, включая характеристики взаимодействия систем как на земле, так и в полете. Системы должны функционировать в такой степени, чтобы можно было выполнять все штатные, нештатные и аварийные рабочие процедуры
|
+
|
+
|
+
|
+
|
+
|
Работа системы самолета должна подтверждаться и проверяться на основе данных об этой системе, представленных либо изготовителем самолета, либо изготовителем комплектного оборудования, или же на основе альтернативных данных, утвержденных для систем или компонентов самолета.
После включения систем их надлежащее функционирование должно регулироваться органами управления члена летного экипажа и для этого не требуется каких-либо дополнительных команд от органов управления инструктора
|
|||
|
4.2
|
АЗС
|
|||||||||
|
4.2.S
|
АЗС, которые влияют на выполнение процедур и (или) на показания приборов, наблюдаемые в кабине пилота (летного экипажа), должны имитироваться функционально точно
|
+
|
+
|
+
|
||||||
|
4.2.R
|
АЗС, которые влияют на выполнение процедур и (или) на показания приборов, наблюдаемые в кабине пилота (летного экипажа), должны имитироваться функционально точно
|
+
|
+
|
+
|
+
|
+
|
Применимо, если АЗС установлены
|
|||
|
4.3
|
ПОКАЗАНИЯ ПРИБОРОВ
|
|||||||||
|
4.3.S
|
Все соответствующие показания приборов, задействованные в моделировании самолета, должны автоматически реагировать на перемещения рычагов управления членом летного экипажа или на атмосферные возмущения, а также реагировать на эффекты, обусловленные обледенением
|
+
|
+
|
+
|
Числовые значения должны указываться в соответствующих единицах измерения
|
|||||
|
4.3.R
|
Все соответствующие показания приборов, задействованные в моделировании самолета, должны автоматически реагировать на перемещения рычагов управления членом летного экипажа или на атмосферные возмущения, а также реагировать на эффекты, обусловленные обледенением
|
+
|
+
|
+
|
+
|
+
|
Числовые значения должны указываться в соответствующих единицах измерения
|
|||
|
4.4
|
СИСТЕМЫ СВЯЗИ, НАВИГАЦИОННЫЕ СИСТЕМЫ, СИСТЕМЫ ПРЕДУПРЕЖДАЮЩЕЙ И АВАРИЙНОЙ СИГНАЛИЗАЦИИ
|
|||||||||
|
4.4.S
|
Оборудование связи, навигационное оборудование, а также оборудование предупредительной и аварийной сигнализации, соответствующее оборудованию, установленному на самолете конкретного типа, должно функционировать в пределах допусков, установленных для такого бортового оборудования
|
+
|
+
|
+
|
||||||
|
4.4.R
|
Оборудование связи, навигационное оборудование, а также оборудование предупредительной и аварийной сигнализации, обычно устанавливаемое на типовом имитируемом самолете, должно функционировать в пределах допусков, установленных для такого бортового оборудования
|
+
|
+
|
+
|
+
|
+
|
||||
|
4.5
|
ПРОТИВООБЛЕДЕНИТЕЛЬНЫЕ СИСТЕМЫ
|
|||||||||
|
4.5.S
|
Функционирование противообледенительных систем, соответствующих антиобледенительным системам самолета конкретного типа, должно обеспечивать адекватное воспроизведение эффектов обледенения планера самолета, двигателей и датчиков приборов
|
+
|
+
|
+
|
||||||
|
4.5.R
|
Противообледенительные системы, соответствующие обычно устанавливаемым на самолетах данного класса, должны быть функционирующими
|
+
|
+
|
+
|
+
|
+
|
Следует использовать упрощенные модели обледенения планера и двигателя, включая воздухозаборники и систему приемника воздушного давления, которые воспроизводят соответствующие ухудшения характеристик в результате обледенения. Также должны воспроизводиться эффекты, наблюдаемые при задействовании противообледенительной систем
|
|||
5. Рычаги управления самолетом и усилия на них
|
5.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК РЫЧАГОВ УПРАВЛЕНИЯ САМОЛЕТОМ И УСИЛИЙ НА НИХ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
5.S
|
Усилия на рычаги управления и перемещения рычагов управления должны точно соответствовать тем, которые имеют место на самолете
|
+
|
+
|
+
|
||||||
|
При перемещениях рычагов управления должны воспроизводиться такие же эффекты, которые имеют место на самолете при тех же условиях полета
|
||||||||||
|
Динамические характеристики усилий на рычагах управления авиационного тренажера должны точно соответствовать моделируемому самолету
|
||||||||||
|
5.R
|
Характеристики рычагов управления и усилий аналогичны таким же характеристикам класса самолетов с соответствующей массой
|
+
|
+
|
+
|
||||||
|
Требуется активная обратная связь по усилиям
|
||||||||||
|
5.R1
|
Характеристики рычагов управления и усилий аналогичны таким же характеристикам класса самолетов с соответствующей массой
|
+
|
||||||||
|
Не требуется активной обратной связи по усилиям
|
||||||||||
|
5.G
|
Характеристики рычагов управления и усилий аналогичны таким же характеристикам класса самолетов с соответствующей массой
|
+
|
+
|
|||||||
|
Не требуется активной обратной связи по усилиям
|
||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК РЫЧАГОВ УПРАВЛЕНИЯ САМОЛЕТОМ И УСИЛИЙ НА НИХ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
5.1
|
УСИЛИЯ НА РЫЧАГИ УПРАВЛЕНИЯ И ПЕРЕМЕЩЕНИЯ РЫЧАГОВ УПРАВЛЕНИЯ
|
Тестирование усилий в зависимости от положений рычага управления не выполняется, если на авиационном тренажере усилия воспроизводятся исключительно с помощью самолетного оборудования
|
||||||||
|
5.1.S
|
Усилия на рычаги управления, перемещения рычагов управления и положения поверхностей управления должны соответствовать моделируемому самолету конкретного типа. Реакция на перемещения рычагов управления, управляющие усилия и отклонения поверхностей управления, должна быть точно такой, как на реальном самолете при тех же условиях полета и при тех же состояниях систем
|
+
|
+
|
+
|
Требуется активная обратная связь по усилиям, если таковая предусмотрена в системе самолета.
|
|||||
|
5.1.R
|
Усилия на рычаги управления, перемещения рычагов управления и положения поверхностей управления должны соответствовать моделируемому самолету или классу моделируемых самолетов. Реакция на перемещения рычагов управления, управляющие усилия и отклонения поверхностей управления, должна быть точно такой, как на реальном самолете или классе самолетов при тех же условиях полета и при тех же состояниях систем
|
+
|
+
|
+
|
Требуется активная обратная связь по усилиям, если таковая предусмотрена в системе самолета
|
|||||
|
5.1.R1
|
Управляющие поверхности должны реагировать точно так, как и на реальном самолете, или классе самолетов при тех же условиях полета и при тех же состояниях систем, однако перемещения рычагов управления и усилия на рычагах управления должны лишь приблизительно соответствовать таким же перемещениям и усилиям на моделируемом самолете или классе моделируемых самолетов
|
+
|
Активной обратной связи по усилиям не требуется
|
|||||||
|
5.1.G
|
Усилия на рычаги управления, перемещения рычагов управления и положения поверхностей управления должны лишь приблизительно соответствовать моделируемому самолету или классу моделируемых самолетов
|
+
|
+
|
Активная обратная связь по усилиям не требуется. Допускается воспроизведение усилий на рычаги управления с помощью пассивных устройств
|
||||||
|
5.2
|
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ УСИЛИЙ НА РЫЧАГАХ УПРАВЛЕНИЯ
|
|||||||||
|
5.2.S
|
Динамические характеристики усилий на рычагах управления должны быть точной копией таких же характеристик моделируемого самолета
|
+
|
+
|
+
|
||||||
|
5.3
|
ФУНКЦИОНИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
|
|||||||||
|
5.3.S
|
Системы управления, включая резервные системы, должны имитировать работу систем управления самолетом в штатных и нештатных режимах, а также точно воспроизводить возможные отказы соответствующих систем. При этом должны точно моделироваться соответствующие индикация и сообщения в кабине летного экипажа
|
+
|
+
|
+
|
||||||
|
5.3.R, R1
|
Системы управления, включая резервные системы, должны имитировать работу систем управления самолетом в штатных и нештатных режимах, а также точно воспроизводить возможные отказы соответствующих систем. При этом должны точно моделироваться соответствующие индикация и сообщения в кабине летного экипажа
|
+
|
+
|
+
|
||||||
|
5.3.G
|
Системы управления должны обеспечить выполнение основных функций эксплуатации самолета с соответствующей индикацией в кабине экипажа
|
+
|
+
|
|||||||
6. Акустические эффекты
|
6.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ АКУСТИЧЕСКИХ ЭФФЕКТОВ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
Звукоакустическая модель ВС, формируется из 2-х библиотек - звуковая референсная библиотека и проверочная метрологическая библиотека. Данные библиотеки входят в ПИД, формируемого в ходе изготовления и испытаний данного типа ВС
|
||||||||||
|
Референсная библиотека - звуковые файлы, отражающие работу основных узлов, агрегатов и систем в диапазоне частот 30 Гц - 16 кГц, представленных в цифровом формате
|
||||||||||
|
В референсной библиотеке файлы должны быть представлены в одном из цифровых "моно" аудиоформатов, без сжатия, с частотой дискретизации не менее 44,1 КГц. Все звуковые файлы должны быть нормализованы по выходному значению (-3 дБ)
|
||||||||||
|
Проверочная контрольная библиотека - зарегистрированные шумомером-анализатором спектра в контрольных точках уровни звукового давления в треть октавных полосах частот для основных (длительных стационарных) режимов полета ВС
|
||||||||||
|
Проверочная контрольная библиотека должна быть сформирована в процессе измерений звукового давления в стационарных режимах полета ВС
|
||||||||||
|
6.S
|
Моделированию подлежат шумы и звуки от двигателя, планера и других систем и агрегатов самолета и окружающей обстановки, воспринимаемые летным экипажем во время выполнения полетов
|
+
|
+
|
+
|
+
|
+
|
||||
|
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 20 Гц - 18 кГц, соответствующих по звуковому давлению и спектральному составу
|
||||||||||
|
6.R
|
Моделированию подлежат шумы и звуки от двигателя, планера и других систем и агрегатов самолета и окружающей обстановки, воспринимаемые летным экипажем во время выполнения полетов
|
+
|
+
|
+
|
+
|
+
|
||||
|
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 80 Гц - 12 кГц, соответствующих по звуковому давлению и спектральному составу
|
||||||||||
|
6.G
|
Моделированию подлежат значительные шумы и звуки, воспринимаемые летным экипажем во время выполнения полетов.
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 150 Гц - 10 кГц, соответствующих по звуковому давлению и спектральному составу
|
+
|
+
|
+
|
||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ЗВУКОВОСПРОИЗВОДЯЩЕЙ И УСИЛИВАЮЩЕЙ СИСТЕМЕ МОДЕЛИРОВАНИЯ АКУСТИЧЕСКИХ ЭФФЕКТОВ
|
||||||||||
|
6.1
|
ЗВУКОВОСПРОИЗВОДЯЩАЯ И УСИЛИВАЮЩАЯ СИСТЕМА ИМИТАЦИИ ЗВУКОВ
|
|||||||||
|
6.1.S
|
Программно-аппаратный комплекс приема, обработки, конвертации цифровых значений и воспроизведения в практически диффузное акустическое поле в объеме тренажера
Сформированное акустическое поле должно быть в практическом соответствии с параметрами акустического поля кабины ВС (уровень звукового давления), сформированных в нормальных условиях полета на заданных режимах полета.
Соответствие определяется третьоктавными спектрами звукового давления в диапазоне частот 20 - 20000 Гц и уровнями звука A, шумов, соответствующих различным режимам полета самолета (зарегистрированных и входящих в состав утвержденного набора звуковых данных), и соответствующих данных проверочной контрольной библиотеки
|
+
|
+
|
+
|
+
|
+
|
Требуется ЗОС
|
|||
|
6.1.R
|
Программно-аппаратный комплекс приема/передачи, обработки, конвертации цифровых значений и воспроизведения в практически диффузное акустическое поле в объеме тренажера
|
+
|
+
|
+
|
+
|
+
|
||||
|
Сформированное акустическое поле должно быть в практическом соответствии с параметрами акустического поля кабины ВС, сформированных в нормальных условиях полета на заданных режимах полета. Соответствие определяется третьоктавными спектрами звукового давления в диапазоне частот 20 - 20000 Гц и уровнями звука A, шумов, соответствующих различным режимам полета ВС (зарегистрированных и входящих в состав утвержденного набора звуковых данных), и соответствующих данных проверочной контрольной библиотеки
|
||||||||||
|
6.1.G
|
Программно-аппаратный комплекс приема (передачи), обработки, конвертации цифровых значений и воспроизведения в практически диффузное акустическое поле в объеме тренажера
|
+
|
+
|
+
|
Требуется ЗОС
|
|||||
|
Сформированное акустическое поле должно быть в практическом соответствии с параметрами акустического поля кабины ВС, сформированных в нормальных условиях полета на заданных режимах полета. Соответствие определяется третьоктавными спектрами звукового давления в диапазоне частот 20 - 20000 Гц и уровнями звука A, шумов, соответствующих различным режимам полета ВС (зарегистрированных и входящих в состав утвержденного набора звуковых данных), и соответствующих данных проверочной контрольной библиотеки
|
||||||||||
|
6.2
|
ШУМЫ И ЗВУКИ В РЕЗУЛЬТАТЕ УДАРА ПРИ АВАРИИ
|
|||||||||
|
6.2.S
|
Шумы и звуки в результате удара при аварии, когда превышаются установленные для моделируемого самолета ограничения
|
+
|
+
|
+
|
+
|
+
|
В случае неполной библиотеки утвержденного набора звуковых данных должна быть произведена дополнительная регистрация и звуковая запись необходимых для формирования звуковой модели звуков непосредственно в ходе полета ВС. Полученные данные измерений и звуковая информация, в последующем должны быть обработаны и сведены в самостоятельные библиотеки звуковых и проверочных (контрольных) данных. Последние каталогизируются для синтезирования в параметрической и временной форме в рамках звукового модуля
|
|||
|
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 80 Гц - 18 кГц и соответствующих спектральному составу и амплитуде заданных значений
|
||||||||||
|
6.2.R
|
Шумы и звуки в результате удара при аварии, когда превышаются установленные для моделируемого самолета ограничения
Библиотеки звуковой модели ВС, должны быть сформированы из библиотек, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 150 Гц - 12 кГц, и соответствующих спектральному составу и амплитуде заданных значений
|
В случае неполной библиотеки утвержденного набора звуковых данных, должна быть произведена дополнительная регистрация и звуковая запись необходимых для формирования звуковой модели звуков непосредственно в ходе полета ВС. Полученные данные измерений и звуковая информация в последующем должны быть обработаны и сведены в самостоятельные библиотеки звуковых и проверочных (контрольных) данных. Вышеуказанные данные каталогизируются для синтезирования в параметрической и временной форме в рамках звукового модуля
|
||||||||
|
6.2.G
|
Шумы и звуки в результате удара при аварии, когда превышаются установленные для моделируемого самолета ограничения
|
+
|
+
|
+
|
В случае неполной библиотеки утвержденного набора звуковых данных, звуковые данные могут быть синтезированы искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля
|
|||||
|
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 150 Гц - 10 кГц и соответствующих амплитуде заданных значений
|
||||||||||
|
6.3
|
ШУМЫ И ЗВУКИ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ
|
|||||||||
|
6.3.S
|
Значительные шумы и звуки окружающей обстановки должны соответствовать моделируемым метеоусловиям
|
+
|
+
|
+
|
+
|
+
|
Шумы и звуковые данные синтезируются искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме в рамках звукового модуля. Акустическая модель должна отражать влияние земли и атмосферы на уровень звукового давления (изменения скорости звука при изменении свойств атмосферы и отражающие свойства земной и водной поверхности)
|
|||
|
6.3.R
|
Значительные шумы и звуки окружающей обстановки должны соответствовать моделируемым метеоусловиям
|
+
|
+
|
+
|
+
|
+
|
Шумы и звуковые данные синтезируются искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме в рамках звукового модуля. Акустическая модель должна отражать влияние земли на уровень звукового давления (отражающие свойства земной и водной поверхности)
|
|||
|
6.3.G
|
Шумы и звуки окружающей обстановки не требуются. Однако если такие шумы и звуки все-таки имеются, то они должны соответствовать моделируемым метеоусловиям
|
+
|
+
|
+
|
Шумы и звуковые данные синтезируются искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме в рамках звукового модуля
|
|||||
|
6.4
|
УРОВНИ ГРОМКОСТИ ШУМОВ И ЗВУКОВ
|
|||||||||
|
6.4.S
|
Уровень громкости звука, должен соответствовать фактическому уровню громкости, указанному в утвержденном наборе звуковых данных и графику кривых равной громкости (изофонами). Они представляют собой графики стандартизированных зависимостей уровня звукового давления от частоты при заданном уровне громкости. С помощью этой диаграммы можно определить уровень громкости какой-либо частоты, зная уровень создаваемого им звукового давления
|
+
|
+
|
+
|
+
|
+
|
Должно предусматриваться выдача сигнализации на основной странице рабочего места инструктора (далее - РМИ), которое всегда видна инструктору
|
|||
|
Регулятор громкости должен иметь возможность автоматического и программного изменения и корректировки уровня громкости звука, по алгоритму графика изофонами, с соответствующей индикацией
|
||||||||||
|
6.4.R
|
Уровень громкости звука, должен соответствовать фактическому уровню громкости, указанному в утвержденном наборе звуковых данных и графику кривых равной громкости (изофонами). Они представляют собой графики стандартизированных зависимостей уровня звукового давления от частоты при заданном уровне громкости. С помощью этой диаграммы можно определить уровень громкости чистого тона какой-либо частоты, зная уровень создаваемого им звукового давления
|
+
|
+
|
+
|
+
|
+
|
Должно предусматриваться выдача сигнализации на основной странице рабочего места инструктора РМИ, которое всегда видна инструктору
|
|||
|
Регулятор громкости должен иметь возможность автоматического и программного изменения и корректировки уровня громкости звука, по алгоритму изофонов, с соответствующей индикацией
|
||||||||||
|
6.4.G
|
Уровень громкости звука, должен соответствовать фактическому уровню громкости, указанному в утвержденном наборе звуковых данных и графику кривых равной громкости (изофонами). Они представляют собой графики стандартизированных зависимостей уровня звукового давления от частоты при заданном уровне громкости. С помощью этой диаграммы можно определить уровень громкости, на какой-либо частоте, зная уровень создаваемого им звукового давления
|
+
|
+
|
+
|
Должно предусматриваться выдача сигнализации на основной странице рабочего места инструктора РМИ, которое всегда видна инструктору
|
|||||
|
Регулятор звукового давления громкости должен иметь возможность автоматического и программного изменения и корректировки уровня громкости звука, по алгоритму изофонов, с соответствующей индикацией
|
||||||||||
|
6.5
|
НАПРАВЛЕННОСТЬ ЗВУКА
|
|||||||||
|
6.5.S
|
Звуковые банки должны автоматически панорамировать сигналы по расположению звуковых источников многоканальной (6 и более каналов) звуковоспроизводящей системы
|
+
|
+
|
+
|
+
|
+
|
Требуется ЗОС
|
|||
|
Используется многоканальная система воспроизведения от 4 каналов и более
|
||||||||||
|
Локализация источника звука должна быть не менее 15 в горизонтальной плоскости и не менее 30° в вертикальной плоскости
|
||||||||||
|
Локализация источников звука в кабине тренажера, должна осуществляться с учетом направления распространения звука от основных источников ВС, без нарушения визуального восприятия рабочего пространства кабины членами экипажа
|
||||||||||
|
6.5.R
|
Звуковые банки должны автоматически панорамировать сигналы по расположению звуковых источников многоканальной (4 и более каналов) звуковоспроизводящей системы
|
+
|
+
|
+
|
+
|
Используется многоканальная система воспроизведения от 3 каналов и более
|
||||
|
Локализация источников звука в кабине тренажера, должна осуществляться с учетом направления распространения звука от основных источников ВС, без нарушения визуального восприятия рабочего пространства кабины членами экипажа
|
Локализация источника звука должна быть не менее 20° в горизонтальной плоскости и не менее 40° в вертикальной плоскости
|
|||||||||
|
6.5.G
|
Звуковые банки должны автоматически панорамировать сигналы по расположению звуковых источников многоканальной (2 и более каналов) звуковоспроизводящей
|
+
|
+
|
+
|
Используется многоканальная система воспроизведения и усиления от 2 каналов и более
|
|||||
|
Локализация источника звука должна быть не менее 30° в горизонтальной плоскости, в вертикальной плоскости требования не устанавливаются
|
||||||||||
|
Локализация источников звука в кабине тренажера, должна осуществляться с учетом направления распространения звука от основных источников ВС, без нарушения визуального восприятия рабочего пространства кабины членами экипажа
|
||||||||||
|
6.6.
|
АКСЕЛЕРАЦИОННЫЕ ЗВУКОВЫЕ ЭФФЕКТЫ
|
|||||||||
|
6.6.S
|
Звуковые банки должны включать в себя характерные звуки от вибрации при движениях, тряску (бафтинг) и толчки, которые возникают при эксплуатации самолета, в той степени, в какой они отражают что-либо происходящее с самолетом или состояние самолета и могут ощущаться в кабине пилота (летного экипажа)
|
+
|
+
|
+
|
Использование в многоканальной системе воспроизведения от 6 каналов и более, специального канала акселерационных сигналов
|
|||||
|
Воспроизведение звукоакустической модели ВС, в соответствие с пунктами 6.1 - 6.4 выдаваемыми сигналами акселерационных данных системы подвижности и генераторов вибрации.
|
||||||||||
|
Звуковые банки моделируются в соответствии с эффектами движения
|
||||||||||
|
Уровень звукового сигнала, входящего в ПИД, должен соответствовать величине и спектру вибраций по осям x, y и z, чтобы корректно воспроизводились эффекты движения, ощущаемые на самолете
|
||||||||||
|
6.6.R
|
Звуковые банки должны включать в себя характерные звуки от вибрации при движениях, тряску (далее - бафтинг) и толчки, которые возникают при эксплуатации самолета, в той степени, в какой они отражают что-либо происходящее с самолетом или состояние самолета, и могут ощущаться в кабине пилота (летного экипажа)
|
+
|
+
|
+
|
Использование в многоканальной системе воспроизведения от 4 каналов и более, специального канала акселерационных сигналов
|
|||||
|
Звуковые банки моделируются в соответствии с эффектами движения
|
||||||||||
|
Уровень звукового сигнала, входящего в ПИД, должен соответствовать величине и спектру вибраций по осям x, y и z, чтобы корректно воспроизводились эффекты движения, ощущаемые на самолете или вертолете
|
||||||||||
|
6.7
|
ВИЗУАЛЬНО-ЗВУКОВЫЕ ЭФФЕКТЫ
|
|||||||||
|
6.7.S
|
Звуковые банки должны включать в себя характерные звуки от воспроизводимой визуальной обстановки: засветка от молнии (гроза), аэродромное движение ВС, различной техники, работающих людей, механизмов и объектов
|
Уровень звукового сигнала должен соответствовать звуковому давлению и спектру звуков, зарегистрированных в кабине ВС и входящих в ПИД
|
||||||||
7. Визуальные эффекты
|
7.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК ВИЗУАЛЬНЫХ ЭФФЕКТОВ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
7.S
|
Для каждого пилота должна имитироваться непрерывная зона обзора с эффектом бесконечной перспективы (коллимационным эффектом) и с текстурированным воспроизведением всех условий окружающей среды
|
+
|
+
|
|||||||
|
Имитируются горизонтальная и вертикальная зоны обзора для обеспечения выполнения наиболее сложных маневров, требующих постоянного обзора ВПП
|
||||||||||
|
Минимальное поле обзора: по горизонтали - 200° и по вертикали - 40°
|
||||||||||
|
Для каждого пилота должна имитироваться непрерывная зона обзора с эффектом бесконечной перспективы и с текстурированным воспроизведением всех условий окружающей среды
|
+
|
|||||||||
|
Имитируются горизонтальная и вертикальная зоны обзора для обеспечения выполнения наиболее сложных маневров, требующих постоянного обзора ВПП.
|
||||||||||
|
Минимальное поле обзора: по горизонтали 180° и по вертикали - 40°
|
||||||||||
|
7.R
|
Для каждого пилота должна имитироваться непрерывная зона обзора с текстурированным воспроизведением всех условий окружающей среды
|
+
|
+
|
+
|
||||||
|
Имитируются горизонтальная и вертикальная зоны обзора для обеспечения выполнения наиболее сложных маневров, требующих постоянного обзора ВПП
|
||||||||||
|
Минимальное поле обзора: по горизонтали 200° и по вертикали - 40°
|
||||||||||
|
7.G
|
Должно воспроизводиться текстурированное изображение соответствующих условий окружающей среды
|
+
|
+
|
+
|
||||||
|
Горизонтальный и вертикальный секторы обзора должны обеспечивать пилотирование по основным приборам и переход к визуальному заходу на посадку при заходе на посадку с прямой по приборам
|
||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК ВИЗУАЛЬНЫХ ЭФФЕКТОВ
|
||||||||||
|
7.1
|
ДИСПЛЕЙ (ПРОЕКЦИОННЫЙ ЭКРАН)
|
|||||||||
|
7.1.1
|
ГЕОМЕТРИЯ ДИСПЛЕЯ И ПОЛЕ ОБЗОРА
|
|||||||||
|
7.1.1.S
|
Непрерывное на протяжении всей кабины коллимированное визуальное изображение.
|
+
|
+
|
Вместо этого испытания можно использовать ЗОС.
|
||||||
|
Если учебная задача включает в себя выполнение заходов на посадку по кругу с посадкой на ВПП с обратным курсом, углы поля обзора должны быть более 200° по горизонтали и свыше 40° по вертикали
|
||||||||||
|
Изображение обеспечивает каждому пилоту поле обзора, как минимум 200° по горизонтали и 40° по вертикали.
|
||||||||||
|
Система воспроизведения не должна иметь оптических разрывов и других дефектов изображения, которые могут создавать нереалистичные визуальные эффекты
|
||||||||||
|
Непрерывное на протяжении всей кабины коллимированное визуальное изображение.
|
+
|
Вместо этого испытания можно использовать ЗОС.
|
||||||||
|
Если учебная задача включает в себя выполнение заходов на посадку по кругу с посадкой на ВПП с обратным курсом, углы поля обзора должны быть более 180° по горизонтали и свыше 40° по вертикали
|
||||||||||
|
Изображение обеспечивает каждому пилоту поле обзора, как минимум 180° по горизонтали и 40° по вертикали.
|
||||||||||
|
Система воспроизведения не должна иметь оптических разрывов и других дефектов изображения, которые могут создавать нереалистичные визуальные эффекты
|
||||||||||
|
7.1.1.R
|
Непрерывное визуальное поле обзора, обеспечивающее каждому пилоту поле обзора по горизонтали 200° и по вертикали 40°
|
+
|
+
|
+
|
Коллимация не требуется, но эффекты параллакса должны быть минимизированы (не более 10° для каждого пилота относительно точки, расположенной посередине между точками, в которых находятся глаза пилотов, сидящих на левом и правом креслах)
|
|||||
|
Характеристики системы должны обеспечивать выравнивание зоны воспроизведения с зоной обзора того пилота, который выполняет полет
|
||||||||||
|
Если для выполнения учебных задач требуются зоны обзора увеличенных размеров, то зона обзора должна согласовываться с уполномоченным органом
|
||||||||||
|
Установленное выравнивание должно подтверждаться в ЗОС
|
||||||||||
|
7.1.1.G
|
Одновременно для каждого пилота должно обеспечиваться поле обзора, как минимум 45° по горизонтали и 30° по вертикали, если только не установлено какое-либо ограничение для типа самолета. Минимальное расстояние от положения глаз пилота до экрана дисплея прямого наблюдения должно быть не меньше, чем расстояние до любого прибора, расположенного на передней панели.
При использовании визуальной системы виртуальной реальности (закрытый экран визуализации). Минимальное расстояние определяется конструкцией визуальной системы
|
+
|
+
|
+
|
+
|
Коллимированное изображение не требуется
|
||||
|
7.1.2
|
РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ ДИСПЛЕЯ
|
|||||||||
|
7.1.2.S
|
Разрешающая способность демонстрируется посредством воспроизведения тестовой картины, состоящей из объектов, видимые угловые размеры которых, отсчитываемые из точки положения глаз пилота, не превышают 2 угловых минут на визуальном изображении обстановки на дисплее
|
+
|
+
|
+
|
Требуется ЗОС с расчетами, подтверждающими разрешающую способность
|
|||||
|
7.1.2.R
|
Разрешающая способность демонстрируется посредством воспроизведения тестовой картины, состоящей из объектов, видимые угловые размеры которых, отсчитываемые из точки положения глаз пилота, не превышают 4 угловых минут на визуальном изображении обстановки на дисплее
|
+
|
+
|
+
|
Требуется ЗОС с расчетами, подтверждающими разрешающую способность
|
|||||
|
7.1.2.G
|
Адекватная разрешающая способность визуальной системы виртуальной реальности, обеспечивающей ее использование.
Дисплей визуальной системы виртуальной реальности должна соответствовать разрешению со значениями не менее 1440 x 1600 пикселей на каждый глаз и частотой смены кадров от 90 Гц и выше
|
+
|
+
|
+
|
Требуется ЗОС с расчетами, подтверждающими разрешающую способность
|
|||||
|
7.1.3
|
РАЗМЕР ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА
|
|||||||||
|
7.1.3.S
|
Размер точечного источника света - не более 5 угловых минут
|
+
|
+
|
+
|
Требуется ЗОС, подтверждающее, что в испытательном шаблоне представлены огни, используемые для освещения аэродрома
|
|||||
|
7.1.3.R
|
Размер точечного источника света - не более 8 угловых минут
|
+
|
+
|
+
|
Требуется ЗОС, подтверждающее, что в испытательном шаблоне представлены огни, используемые для освещения аэродрома
|
|||||
|
7.1.3.G
|
Достаточный для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.4
|
КОЭФФИЦИЕНТ КОНТРАСТНОСТИ ИЗОБРАЖЕНИЯ НА ЭКРАНЕ ДИСПЛЕЯ
|
|||||||||
|
7.1.4.S
|
Коэффициент контрастности изображения на экране дисплея не менее 5:1
|
+
|
+
|
+
|
||||||
|
7.1.4.R
|
Коэффициент контрастности изображения на экране дисплея не менее 5:1
|
+
|
+
|
+
|
||||||
|
7.1.4.G
|
Достаточный для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.5
|
КОЭФФИЦИЕНТ КОНТРАСТНОСТИ ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА
|
|||||||||
|
7.1.5.S
|
Коэффициент контрастности точечного источника света не менее 25:1
|
+
|
+
|
+
|
||||||
|
7.1.5.R
|
Коэффициент контрастности точечного источника света не менее 10:1.
|
+
|
+
|
+
|
||||||
|
7.1.5.G
|
Достаточный для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.6
|
ЯРКОСТЬ ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА
|
|||||||||
|
7.1.6.S
|
Яркость точечного источника света не менее 30 кд/м2 (8,8 фут-ламберт)
|
+
|
+
|
+
|
||||||
|
7.1.6.R
|
Яркость точечного источника света не менее 20 кд/м2 (5,8 фут-ламберт)
|
+
|
+
|
+
|
||||||
|
7.1.6.G
|
Достаточная для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.7
|
ЯРКОСТЬ ИЗОБРАЖЕНИЯ НА ЭКРАНЕ ДИСПЛЕЯ
|
|||||||||
|
7.1.7.S
|
Яркость изображения на экране дисплея должна быть продемонстрирована с помощью растрового испытательного шаблона. Яркость изображения должна быть не менее 20 кд/м2 (5,8 фут-ламберт)
|
+
|
+
|
+
|
||||||
|
7.1.7.R
|
Яркость изображения должна быть продемонстрирована с помощью растрового испытательного шаблона. Яркость изображения должна быть не менее 14 кд/м2 (4,1 фут-ламберт)
|
+
|
+
|
+
|
||||||
|
7.1.7.G
|
Достаточная для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.8
|
УРОВЕНЬ ЧЕРНОГО И ПОСЛЕДОВАТЕЛЬНАЯ КОНТРАСТНОСТЬ (только для светоклапанных видеопроекционных систем)
|
|||||||||
|
7.1.8.S
|
Уровень черного и последовательную контрастность необходимо измерять с целью определения их достаточности для проведения тренировок в любое время суток
|
+
|
+
|
+
|
Испытание необходимо проводить только для светоклапанных проекторов. Если такое испытание не проводится, то должно предоставляться ЗОС с объяснением причины
|
|||||
|
7.1.8.R
|
Достаточный для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.8.G
|
Достаточный для обеспечения утвержденного использования.
|
+
|
+
|
+
|
||||||
|
7.1.9
|
СТЕПЕНЬ РАЗМЫТОСТИ ИЗОБРАЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ (только для светоклапанных видеопроекционных систем)
|
|||||||||
|
7.1.9.S
|
Необходимо проводить испытания для определения степени размытости изображения движущихся объектов, типичной для определенных видов оборудования, используемого для воспроизведения. Следует провести испытание с целью продемонстрировать степень размытости изображений движущихся объектов при заданной скорости движения объекта на изображении
|
+
|
+
|
+
|
Испытание необходимо проводить только для светоклапанных проекторов. Если такое испытание не проводится, то должно предоставляться ЗОС с объяснением причины
|
|||||
|
7.1.9.R
|
Адекватная для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.9.G
|
Адекватная для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.10
|
СПЕКЛ-ИСПЫТАНИЕ (только для лазерных видеопроекционных систем)
|
|||||||||
|
7.1.10.S
|
Проведение такого испытания требуется для определения того, что спекл, типичный для лазерных дисплеев, не превышает уровня отвлечения внимания
|
+
|
+
|
+
|
Испытание требуется проводить только для лазерных проекторов. Если испытание не проводится, то должно предоставляться ЗОС с объяснением причины
|
|||||
|
7.1.10.R
|
Достаточный для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.1.10.G
|
Достаточный для обеспечения утвержденного использования
|
+
|
+
|
+
|
||||||
|
7.2
|
ДОПОЛНИТЕЛЬНЫЕ СИСТЕМЫ ИЗОБРАЖЕНИЯ
|
|||||||||
|
7.2.1
|
ИНДИКАЦИЯ НА ЛОБОВОМ СТЕКЛЕ (далее - ИЛС) (если установлена)
|
|||||||||
|
7.2.1.S
|
Система должна выполнять предписанные функции для каждой процедуры или этапа полета. Активный дисплей (дублирующий индикатор) для отображения всех параметров на комбинированном индикаторе пилота должен быть расположен на рабочем месте инструктора либо в другом месте, утвержденном уполномоченным органом. Формат отображения параметров на дублирующем индикаторе должен соответствовать формату отображения параметров на комбинированном индикаторе пилота
|
+
|
+
|
+
|
Требуется ЗОС
|
|||||
|
7.2.1.R
|
Необходимо продемонстрировать, что система может выполнять предписанные функции для каждой процедуры или этапа полета. Активный дисплей (дублирующий индикатор) для отображения всех параметров на комбинированном индикаторе пилота должен быть расположен на рабочем месте инструктора либо в другом месте, утвержденном уполномоченным органом. Формат отображения параметров на дублирующем индикаторе должен соответствовать формату отображения параметров на комбинированном индикаторе пилота
|
+
|
+
|
+
|
Требуется ЗОС
|
|||||
|
Только один ИЛС может использоваться пилотом, который управляет полетом, с учетом необходимого положения его глаз для обеспечения четкости восприятия изображения. В качестве альтернативы ИЛС может использоваться как часть изображения визуальной картины
|
||||||||||
|
7.2.2.
|
СИСТЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ
|
|||||||||
|
7.2.2.G
|
Необходимо продемонстрировать, что система способна выполнять предписанные функции для каждой процедуры или этапа полета. При использовании визуальной системы виртуальной реальности (закрытый экран визуализации).
Минимальное расстояние определяется конструкцией визуальной системы.
Формат визуальных данных отображения параметров на индивидуальном экране, должен соответствовать формату отображения параметров на дублирующем экране, расположенного в зоне инструктора
|
+
|
+
|
+
|
Аппаратное и программное обеспечение имитатора системы визуализации, включая непосредственное соответствующие индикаторы и систему световой сигнализации в кабине пилотов тренажера, должны функционировать так же, как и система установленная на самолете, или эквивалентно ей
|
|||||
|
7.2.2
|
БОРТОВАЯ СИСТЕМА ТЕХНИЧЕСКОГО ЗРЕНИЯ С РАСШИРЕННЫМИ ВОЗМОЖНОСТЯМИ ВИЗУАЛИЗАЦИИ (далее - EFVS) (если установлена)
|
|||||||||
|
7.2.2.S
|
Аппаратное и программное обеспечение имитатора EFVS, включая соответствующие индикаторы и систему световой сигнализации в кабине пилотов тренажера, должны функционировать так же, как и система EFVS, установленная на самолете, или эквивалентно ей. Для функционирования EFVS должен быть смоделирован как минимум один аэропорт. Модель должна включать систему посадки по приборам (далее - ILS) и выполнение неточного захода на посадку (с использованием системы вертикальной навигации (далее - VNAV), если она необходима для данного типа самолета).
|
+
|
+
|
+
|
||||||
|
Согласно требованию к ИЛС, указанному в пункте 7.2.1.S, изображение должно дублироваться на РМИ
|
||||||||||
|
Для обеспечения минимумов EFVS на РМИ должна предусматриваться возможность предварительной настройки метеоусловий
|
||||||||||
|
7.2.2.R
|
Аппаратное и программное обеспечение имитатора EFVS, включая соответствующие индикаторы и систему световой сигнализации в кабине пилотов тренажера, должны функционировать так же, как и система EFVS, установленная на самолете, или эквивалентно ей. Для функционирования EFVS должен быть смоделирован как минимум один аэропорт. Модель должна включать систему посадки по приборам и выполнение неточного захода на посадку (с использованием VNAV), если она необходима для данного типа самолета)
|
+
|
+
|
+
|
Только один индикатор EFVS может использоваться пилотом, который управляет полетом, с учетом необходимого положения его глаз для обеспечения четкости восприятия изображения. В качестве альтернативы EFVS может использоваться как часть изображения визуальной картины
|
|||||
|
7.3
|
ВИДИМЫЙ УЧАСТОК ЗЕМЛИ
|
|||||||||
|
7.3.S
|
Требуется проведение проверки правильности восприятия видимого участка земли на конечном этапе захода на посадку по категории II и правильности положения самолета относительно ВПП
|
+
|
+
|
+
|
||||||
|
7.3.R
|
Требуется проведение проверки правильности восприятия видимого участка земли на конечном этапе захода на посадку по категории II и правильности положения самолета относительно ВПП
|
+
|
+
|
+
|
||||||
|
7.3.G
|
Демонстрация соответствующего восприятия видимого участка
|
+
|
+
|
+
|
||||||
8. Акселерационные эффекты
|
8.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК АКСЕЛЕРАЦИОННЫХ ЭФФЕКТОВ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||
|
8.R
|
Акселерационные эффекты, должны обеспечивать соответствующее восприятие ускорений на самолете по 6 степеням свободы
|
+
|
+
|
|||||||||
|
Система акселерационных эффектов должна постоянно создавать правильные ощущения движения
|
||||||||||||
|
8.R1
|
Пилот должен воспринимать характерные акселерационные эффекты, которые обеспечивают соответствующее восприятие ускорений на самолете по 6 степеням свободы
|
+
|
||||||||||
|
Система акселерационных эффектов должна постоянно создавать правильные ощущения движения
|
||||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК АКСЕЛЕРАЦИОННЫХ ЭФФЕКТОВ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||
|
8.1
|
ОБЩИЕ СВЕДЕНИЯ ОБ АКСЕЛЕРАЦИОННЫХ ЭФФЕКТАХ
|
Если системы подвижности устанавливаются дополнительно эксплуатантом авиационного тренажера, даже если они не требуются для тренажера такого типа, но это делается с целью получения каких-либо конкретных преимуществ, то эти системы подвижности должны проходить соответствующую оценку, чтобы гарантировать, что это не скажется отрицательно на квалификационном уровне авиационного тренажера
|
||||||||||
|
8.1.R
|
Воспринимаемые пилотом акселерационные эффекты (воздействия) по 6 степеням свободы должны быть типовыми для моделируемого самолета движениями
|
+
|
+
|
Требуется ЗОС
|
||||||||
|
8.1.R1
|
Воспринимаемые пилотом акселерационные эффекты (силовые воздействия) по 6 степеням свободы должны быть типовыми для моделируемого самолета движениями
|
+
|
Требуется ЗОС
|
|||||||||
|
8.2
|
СИЛОВЫЕ ВОЗДЕЙСТВИЯ ПРИ ДВИЖЕНИИ
|
|||||||||||
|
8.2.R
|
Система подвижности должна воспроизводить воздействия, по меньшей мере, эквивалентные тем, которые создаются системой с подвижной платформой с шестью степенями свободы (по тангажу, крену, рысканию, вдоль вертикальной, поперечной и продольной осей)
|
+
|
+
|
Требуется ЗОС
|
||||||||
|
8.2.R1
|
Система подвижности должна воспроизводить воздействия, по меньшей мере, эквивалентные тем, которые создаются системой с подвижной платформой с шестью степенями свободы (по тангажу, крену, рысканию, вдоль вертикали, поперечной оси и продольной оси). Интенсивность эффектов может быть частично уменьшена и восприятие движения может быть снижено
|
+
|
Требуется ЗОС
|
|||||||||
|
8.3
|
ЭФФЕКТЫ ДВИЖЕНИЯ
|
|||||||||||
|
8.3.R
|
Эффекты движения должны включать в себя характерные вибрации при движениях, тряску (бафтинг) и толчки, которые возникают при эксплуатации самолета, в той степени, в какой они отражают что-либо происходящее с самолетом или состояние самолета и могут ощущаться в кабине пилота (летного экипажа). Подобные эффекты должны, быть, по крайней мере, по трем осям x, y и z, чтобы воспроизводились эффекты движения, ощущаемые на самолете:
|
|||||||||||
|
1)
|
эффекты, связанные с рулением, такие как воздействия в боковом и продольном направлении, возникающие в результате входных сигналов управления направлением движения и торможением;
|
+
|
+
|
|||||||||
|
2)
|
эффекты тряски при движении по ВПП и рулежным дорожкам, деформации стойки шасси с масляным амортизатором, эффекты, вызванные неровностями ВПП, загрязнением ВПП с учетом соответствующих противогазовых характеристик, характеристики огней осевой линии ВПП (подобные эффекты зависят от скорости движения самолета по земле);
|
+
|
+
|
|||||||||
|
3)
|
тряска на земле вследствие выпуска интерцепторов (аэродинамических тормозов) и реверса тяги;
|
+
|
+
|
|||||||||
|
4)
|
толчки, связанные с шасси;
|
+
|
+
|
|||||||||
|
5)
|
тряска при выпуске и уборке шасси;
|
+
|
+
|
|||||||||
|
6)
|
тряска в воздухе при выпуске закрылков и интерцепторов (аэродинамических тормозов);
|
+
|
+
|
|||||||||
|
7)
|
тряска вследствие возмущений в атмосфере;
|
+
|
||||||||||
|
8)
|
тряска при приближении к сваливанию;
|
+
|
+
|
|||||||||
|
9)
|
воздействия в результате касания земли основными и носовой стойками шасси;
|
+
|
+
|
Толчки при касании земли должны отражать эффекты поперечных и путевых воздействий при посадке со смещением или при боковом ветре
|
||||||||
|
10)
|
скольжение носового колеса (если применимо);
|
+
|
+
|
|||||||||
|
11)
|
эффект тяги при включенных тормозах;
|
+
|
+
|
|||||||||
|
12)
|
скоростной бафтинг и тряска при выполнении маневров;
|
+
|
+
+
|
|||||||||
|
13)
|
динамические эффекты при разрушении пневматиков;
|
+
|
+
|
|||||||||
|
14)
|
отказы, неисправности и повреждения двигателя;
|
+
|
+
|
|||||||||
|
15)
|
удары по хвостовому оперению и гондолам двигателей;
|
+
|
+
|
Соответствующие воздействия, помогающие распознавать отказы в критических условиях полета (ощущения путевого и поперечного движения в случае асимметричного отказа двигателей)
|
||||||||
|
16)
|
другие существенные эффекты вибраций, тряски и толчков, которые не упомянуты выше (эффект турбины, приводимой в действие набегающим потоком), или пункты из контрольного перечня, эффекты движения, обусловленные входными сигналами от органов управления в процессе выполнения предполетных процедур
|
+
|
||||||||||
|
8.3.R1
|
Эффекты движения должны включать в себя характерные вибрации при движении, тряску и толчки, которые возникают при эксплуатации
самолета, в той степени, в какой они отражают что-либо происходящее с самолетом или состояние самолета и могут ощущаться в кабине пилота (летного экипажа). Данные эффекты должны, быть, воспроизводиться по трем осям x, y и z, чтобы воспроизводились эффекты движения, ощущаемые на самолете:
|
|||||||||||
|
1)
|
эффекты, связанные с рулением, такие как воздействия в боковом и продольном направлении, возникающие в результате входных сигналов управления направлением движения и торможением;
|
+
|
||||||||||
|
2)
|
эффекты тряски при движении по ВПП и рулежным дорожкам, деформации стойки шасси с масляным амортизатором, эффекты, вызванные неровностями ВПП, загрязнением ВПП с учетом соответствующих противоюзовых характеристик, характеристики огней осевой линии ВПП (подобные эффекты зависят от скорости движения самолета по земле);
|
+
|
||||||||||
|
3)
|
тряска на земле вследствие выпуска интерцепторов (аэродинамических тормозов) и реверса тяги;
|
+
|
||||||||||
|
4)
|
толчки, связанные с шасси;
|
+
|
||||||||||
|
5)
|
тряска при выпуске и уборке шасси;
|
+
|
||||||||||
|
6)
|
тряска в воздухе при выпуске закрылков и интерцепторов (аэродинамических тормозов);
|
+
|
||||||||||
|
7)
|
тряска в воздухе при выпуске закрылков и интерцепторов аэродинамических тормозов);
|
+
|
||||||||||
|
8)
|
тряска при приближении к сваливанию;
|
+
|
||||||||||
|
9)
|
воздействия в результате касания земли основными и носовой стойками шасси;
|
+
|
Толчки при касании земли должны отражать эффекты поперечных и путевых движений при посадке боком или при боковом ветре
|
|||||||||
|
10)
|
скольжение носового колеса (если применимо);
|
+
|
||||||||||
|
11)
|
эффект тяги при включенных тормозах;
|
+
|
||||||||||
|
12)
|
тряска при выполнении маневров;
|
+
|
||||||||||
|
13)
|
динамические эффекты при разрушении пневматиков;
|
+
|
||||||||||
|
14)
|
отказы, неисправности и повреждения двигателя;
|
+
|
||||||||||
|
15)
|
удары по хвостовому оперению и гондолам двигателей;
|
+
|
Соответствующие эффекты, помогающие распознавать неисправности в критических условиях полета (путевые эффекты и эффекты в поперечном направлении в случае несимметричных отказов двигателей)
|
|||||||||
|
16)
|
другие существенные эффекты вибраций, тряски и толчков, которые не упомянуты выше (эффект турбины, приводимой в действие набегающим потоком) или пункты из контрольного перечня, эффекты движения, обусловленные входными сигналами управления в процессе выполнения предполетных процедур
|
+
|
||||||||||
|
8.4
|
ВИБРАЦИИ ПРИ ДВИЖЕНИИ
|
|||||||||||
|
8.4.R
|
Необходимо проводить испытания для оценки вибраций при движениях и результаты испытаний должны включать в себя записи, которые позволяют сравнить относительные амплитуды в зависимости от частоты (соответствующие частоты, как минимум, до 20 Гц).
Должны воспроизводиться характерные вибрации при движении, возникающие в процессе эксплуатации самолета, в той степени, в какой эти вибрации характеризуют собой происходящее с самолетом или состояние самолета, и могут
ощущаться в кабине летного экипажа. Авиационный тренажер должен быть запрограммирован и оборудован таким образом, чтобы можно было измерять характерные режимы вибраций и сравнивать результаты с данными, полученными на самолете:
|
+
|
Требуется ЗОС
|
|||||||||
|
1) эффекты тяги при включенных тормозах;
|
+
|
|||||||||||
|
2) тряска при выпущенном шасси;
|
+
|
|||||||||||
|
3) тряска при выпущенных закрылках;
|
+
|
|||||||||||
|
4) тряска при выпущенном аэродинамическом тормозе;
|
+
|
|||||||||||
|
5) тряска при приближении к сваливанию;
|
+
|
|||||||||||
|
6) тряска на больших скоростях или волновой бафтинг;
|
+
|
|||||||||||
|
7) вибрации в процессе полета
|
+
|
Только для винтовых самолетов
|
||||||||||
|
8.4.R1
|
Необходимо проводить испытания для оценки вибраций при движениях и результаты испытаний должны включать в себя записи, которые позволяют сравнить относительные амплитуды в зависимости от частоты (соответствующие частоты, как минимум, до 20 Гц).
Должны воспроизводиться характерные вибрации при движении, возникающие в процессе эксплуатации самолета, в той степени, в какой эти вибрации характеризуют собой происходящее с самолетом или состояние самолета, и могут ощущаться в кабине летного экипажа.
Авиационный тренажер должен быть запрограммирован и оборудован таким образом, чтобы можно было измерять характерные режимы вибраций и сравнивать результаты с данными, полученными на самолете:
|
Требуется ЗОС
|
||||||||||
|
1)
|
эффекты тяги при включенных тормозах;
|
+
|
||||||||||
|
2)
|
тряска при выпущенном шасси;
|
+
|
||||||||||
|
3)
|
тряска при выпущенных закрылках;
|
+
|
||||||||||
|
4)
|
тряска при выпущенном аэродинамическом тормозе;
|
+
|
||||||||||
|
5)
|
тряска при приближении к сваливанию;
|
+
|
||||||||||
|
6)
|
тряска на больших скоростях или волновой бафтинг;
|
+
|
||||||||||
|
7)
|
вибрации в полете
|
+
|
Только для винтовых самолетов
|
|||||||||
9. Управление воздушным движением - УВД
|
9.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ УВД
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
9.S
|
Должна автоматически моделироваться динамически изменяющаяся обстановка в зоне аэродрома, включая ответы органов УВД на речевые запросы пилотов самолета и соответствующие инициированные органами УВД сообщения
|
+
|
+
|
+
|
Перечисленные в разделе требования могут быть реализованы только по внедрении имитатора изменяющихся условий УВД.
|
|||||
|
Отдельные самостоятельные сообщения, направляемые пилотам самолета и другим самолетам, специфичны для конкретного аэропорта
|
||||||||||
|
Корреляция с видимым движением на земле, совершающими посадку и вылетающими воздушными судами, включая моделирование зон аэропортов в соответствии с программами подготовки
|
||||||||||
|
9.G
|
Должны воспроизводиться конкретные сообщения органов УВД, включая ответы на запросы пилотов самолета в соответствии с этапами полета. Сообщения с борта самолета передаются в соответствии с документом Doc 4444. Передаваемые пилотам самолета сообщения должны быть типичными для органов УВД. Это может сделать инструктор, который имитирует работу органов УВД
|
+
|
+
|
+
|
||||||
|
9.N
|
УВД не требуется
|
+
|
+
|
|||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ УВД
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
9.1
|
АВТОМАТИЗИРОВАННЫЕ СВОДКИ ПОГОДЫ
|
|||||||||
|
Автоматизированные сводки погоды
|
Автоматизированные сводки погоды обеспечивают получение пилотами важной информации о метеоусловиях и оперативной информации УВД. Информация службы автоматической передачи информации в районе аэродрома (далее - ATIS) и другая автоматизированная информация о метеоусловиях могут также передаваться в кабину пилотов по линии передачи данных
|
|||||||||
|
Хотя ATIS является наиболее распространенной из автоматизированных систем передачи информации о метеоусловиях, в некоторых случаях должен решаться вопрос об использовании в контексте выполняемых полетов сводки погоды, передаваемой другими автоматизированными системами, автоматической системой приземных наблюдений (далее - ASOS) или автоматизированной системой наблюдения за погодой (далее - AWOS), используемых в аэропортах, которые функционируют только частично или не имеют своего аэродромного диспетчерского пункта (далее - АДП)
|
||||||||||
|
9.1.S
|
Автоматизированные сводки погоды с нескольких станций
|
+
|
+
|
Система должна обеспечивать возможность воспроизводить различные автоматизированные сводки с сообщениями о погодных условиях, а также о различных иных предварительно заданных условиях во всех аэропортов, расположенных на удалении, позволяющем членам летных экипажей одновременно прослушивать параллельные автоматизированные сводки погоды, поступающие из разных аэропортов
|
||||||
|
Инструктор должен иметь возможность отменять и переопределять любой отдельный параметр, а также каждое предварительно заданное сообщение с рабочего места инструктора
|
||||||||||
|
9.1.R
|
Автоматизированные сводки погоды с одной станции
|
Для всех аэропортов в пределах дальности требуется, как минимум, одна автоматизированная сводка погоды. Сообщение должно включать сведения о фактических условиях погоды, заданные для авиационного тренажера, включая указание соответствующего аэропорта, соответствующей ВПП, температуры, скорости ветра, атмосферного давления, приведенного к уровню моря, облачности, видимости, состояния ВПП, а также других заранее определенных условий полета, которые невозможно считывать с модели
|
||||||||
|
Инструктор должен иметь возможность изменять условия погоды и другие заранее определенные условия с целью формирования автоматической сводки погоды с рабочего места инструктора. Эти входные сигналы от инструктора не должны влиять на фактические погодные условия, воспроизводимые моделью
|
||||||||||
|
9.1.G
|
Автоматизированные сводки погоды с одной станции
|
+
|
+
|
+
|
Для всех аэропортов в пределах дальности требуется, как минимум, одна автоматизированная сводка погоды. Сообщение должно включать сведения о фактических условиях погоды, заданные для авиационного тренажера, включая указание соответствующего аэропорта, соответствующей ВПП, температуры, скорости ветра, атмосферного давления, приведенного к уровню моря, облачности, видимости, состояния ВПП, а также других заранее определенных условий, которые невозможно считывать с модели
|
|||||
|
9.2
|
ФОНОВЫЕ ПЕРЕГОВОРЫ
|
|||||||||
|
9.2.1
S, R, G
|
Фоновые переговоры (по линии связи коллективного пользования).
В целом все фоновые переговоры должны отвечать следующим критериям:
|
+
|
+
|
+
|
+
|
+
|
Переговоры по линии связи коллективного пользования имитируют фоновые переговоры, которые слышны в кабине пилотов, переговоры между другими самолетами, других самолетов с землей, или земли с землей
|
|||
|
1) сообщения должны иметь смысл в контексте моделируемой внешней обстановки и не содержать явно ошибочной информации;
|
||||||||||
|
2) на соответствующей частоте должны быть слышны только те сообщения, которые обычно передаются на этой частоте;
|
||||||||||
|
3) моделируемые сообщения на заданной частоте не должны накладываться друг на друга или на переговоры летного экипажа тренажера;
|
||||||||||
|
4) между сообщениями должны быть достаточные паузы, позволяющие летному экипажу тренажера получить доступ к соответствующей частоте, если это требуется
|
||||||||||
|
9.2.2S
|
Переговоры определяются обстановкой. Сообщения определяются конкретным местоположением и обстановкой и должны быть полностью скоррелированы с визуально моделируемым воздушным движением
|
+
|
+
|
Фоновые переговоры определяются обстановкой.
|
||||||
|
Моделирование фоновых переговоров по каналам связи должно обеспечивать воспроизведение переговоров по линии связи коллективного пользования; передаваемые сообщения должны быть увязаны с моделируемой обстановкой, как по форме, так и содержанию
|
||||||||||
|
Должны точно воспроизводиться конкретные для местоположения процедуры и условные обозначения, а все переговоры должны быть полностью скоррелированы с визуально моделируемым воздушным движением
|
||||||||||
|
Количество голосов должно быть достаточным, чтобы можно было определить различные службы УВД и разных пилотов
|
||||||||||
|
Система должна включать, как минимум, 3 конкретные зоны аэропортов. Эти 3 конкретные зоны аэропортов должны быть частью утвержденной программы подготовки пилотов
|
||||||||||
|
9.2.2R
|
Переговоры определяются обстановкой Базовые сообщения, общие для всех аэропортов, должны быть полностью скоррелированы с визуально моделируемым воздушным движением
|
Фоновые переговоры определяются обстановкой
|
||||||||
|
Моделирование фоновых переговоров по каналам связи должно обеспечивать воспроизведение определяемых конкретной обстановкой сообщений, передаваемых в базовом типовом формате, общем для всех местоположений
|
||||||||||
|
Фоновые переговоры должны коррелироваться со сценарием воздушного движения и не противоречить положению и движению самолета
|
||||||||||
|
Сообщения также должны коррелироваться с визуальным воспроизведением воздушного движения
|
||||||||||
|
Количество голосов должно быть достаточным, чтобы можно было определить различные службы УВД и разных пилотов
|
||||||||||
|
Система должна включать в себя, как минимум, 3 конкретные зоны аэропортов. Эти 3 конкретные зоны аэропортов должны быть частью утвержденной в соответствии с пунктом 4 статьи 54 Воздушного кодекса Российской Федерации программы подготовки пилотов
|
||||||||||
|
9.2.2G
|
Базовые для конкретной обстановки. Базовые сообщения без корреляции
|
+
|
+
|
+
|
Для моделирования фоновых переговоров по каналам связи могут использоваться только базовые сообщения. Такие сообщения должны определяться таким образом, чтобы для адаптации с моделируемой обстановкой требовалась только незначительная информация или не требовалась вообще
|
|||||
|
9.3
|
МОДЕЛИРОВАНИЕ УВД - ВЗАИМОДЕЙСТВИЕ С ТРЕНАЖЕРОМ
|
Получаемые сообщения, относящиеся к положению самолета, оперативной обстановке и условиям окружающей среды, должны соответствовать визуальным картинам и сценарию системы выдачи информации о воздушном движении и предупреждения столкновений (далее - TCAS), если это применимо
|
||||||||
|
9.3.
S, R
|
Моделируемые параметры
Система моделирования системы связи с органами УВД совместно с имитацией бортовых систем самолета и соответствующей окружающей обстановки включает моделирование следующих параметров:
|
+
|
+
|
Система должна включать, как минимум, 3 конкретные зоны аэропортов. Эти 3 конкретные зоны аэропортов должны быть частью утвержденной в соответствии с пунктом 4 статьи 54 Воздушного кодекса Российской Федерации программы подготовки пилотов, включая визуализацию, если это применимо
|
||||||
|
1) направление, скорость, порывы ветра;
|
||||||||||
|
2) атмосферное давление, приведенное к уровню моря или атмосферное давление на уровне аэродрома (установка высотомера);
|
||||||||||
|
3) температура: температура наружного воздуха;
|
||||||||||
|
4) точка росы;
|
||||||||||
|
5) облачность: высота и тип;
|
||||||||||
|
6) видимость;
|
||||||||||
|
7) дальность видимости на ВПП (туман, стелющийся туман, туман местами);
|
||||||||||
|
8) особые погодные условия: дождь, снег (с порывами ветра), турбулентность, обледенение, ожидаемый сдвиг ветра, микропорывы, а также грозовые облака, грозовой фронт (приблизительное положение);
|
||||||||||
|
9) действующие ВПП;
|
||||||||||
|
10) состояние ВПП: загрязнение и степень загрязнения;
|
||||||||||
|
11) эффективность торможения;
|
||||||||||
|
12) всемирное координированное время (UTC);
|
||||||||||
|
13) положение, маршрут, курс и высота, определяемая от выбранного уровня до объекта, относительно которого производится измерение (далее - относительная высота самолета);
|
||||||||||
|
14) позывной самолета
|
||||||||||
|
9.4
|
МОДЕЛИРОВАНИЕ УВД - ВЗАИМОДЕЙСТВИЕ С ИНСТРУКТОРОМ
|
|||||||||
|
9.4.
S, R
|
Инструктор должен иметь возможность взаимодействовать со сценарием, вводя сообщения для своего самолета. По мере необходимости эти сообщения следует группировать по этапам или категориям полета следующим образом:
|
+
|
+
|
Независимо от того, каким образом осуществляется моделирование УВД, необходимо учитывать рабочую нагрузку на инструктора как часть моделирования УВД с целью убедиться в том, что она серьезно не отвлекает его от наблюдения за действиями летного экипажа в процессе его обучения, тестирования или проверки
|
||||||
|
1) зона вылета:
a. диспетчерское обслуживание;
b. техническое обслуживание;
c. вылет - ATIS;
d. разрешение на полет по маршруту;
e. буксировка хвостом вперед;
f. другие обычные переговоры с УВД/авиакомпанией;
2) противообледенительная обработка;
3) руление;
4) предварительный старт;
5) взлет;
6) действия после взлета;
7) набор высоты;
8) полет по маршруту;
9) снижение;
10) прибытие - ATIS;
11) полет в зоне ожидания;
12) заход на посадку;
13) посадка;
14) аварийная ситуация;
15) другие сообщения;
16) кабинный экипаж
|
||||||||||
|
9.5
|
ИНИЦИИРОВАНИЕ СООБЩЕНИЙ УВД
|
|||||||||
|
Инструктора должен иметь возможность инициировать сообщения в ручном или автоматическом режиме
|
||||||||||
|
9.5.1
S, R
|
Ручной режим (основной)
|
+
|
+ <1>
|
Сообщение УВД инициируется инструктором с его рабочего места.
|
||||||
|
<1> Не требуется для Re (Т)
|
||||||||||
|
9.5.2
S, R
|
Автоматический режим (усовершенствованный)
|
+
|
+
|
Сообщение инициируется автоматически, когда это соответствует всем критериям, определяющим его содержание (наземное или воздушное движение, этап полета, погодные условия).
В том случае, когда пилоты самолета не выполняют указания органов УВД, или не следует правильным протоколам считывания информации, система должна выдавать корректирующие сообщения (самолет, находясь в воздухе, не соблюдает установленную скорость, курс или высоту, либо, находясь на земле, не соблюдает правила пересечения предписанных ВПП и рулежных дорожек или остановки перед ними)
|
||||||
|
9.5.3
S, R
|
Моделирование системы связи с УВД должно позволять инструктору временно прерывать ее работу и/или отключать систему и переходить к классическому моделированию без УВД
|
+
|
+
|
|||||||
|
9.6
|
ФРАЗЕОЛОГИЯ
|
|||||||||
|
9.6.1
S, R, G
|
Фразеология и голосовые характеристики
|
+
|
+
|
+
|
+
|
+
|
Для повышения эффективности подготовки пилотов необходимо, чтобы моделирование радиообмена с органами УВД способствовало использованию правильной фразеологии.
Основное внимание следует уделить тому, чтобы добиться 100% реализма, для обеспечения надлежащей осведомленности обучаемых об обстановке во время тренировок
|
|||
|
9.7
|
ОПОЗНАВАНИЕ ЧАСТОТЫ УВД В ЗАВИСИМОСТИ ОТ ЭТАПА ПОЛЕТА
|
|||||||||
|
9.7.1
S, R, G
|
Связь должна вестись на радиочастотах, установленных в кабине пилотов:
|
+
|
+
|
+
|
+
|
+
|
Опознавание частоты УВД, в зависимости от этапа полета, является требованием для всех уровней моделирования УВД и означает, что все сообщения, получаемые пилотом, должны передаваться на радиочастотах, соответствующих установленным в кабине пилотов.
|
|||
|
1) Одночастотная связь;
|
||||||||||
|
9.7.1
S, R, G
|
2) Многочастотная связь
|
+
|
+
|
|||||||
|
9.7.2
S, R, G
|
Моделируемую внешнюю обстановку следует постоянно обновлять в увязке с обновлениями других систем в связи с изменениями радиочастоты авиакомпании или органов УВД
|
+
|
+
|
+
|
+
|
+
|
Должно быть в наличии оборудование, позволяющее использовать радиочастоты авиакомпании, однако эти частоты не обязательно должны соответствовать радиочастотам реальной авиакомпании, и при условии, что при этом не возникает конфликтов с существующими частотами УВД
|
|||
|
9.8
|
УПРАВЛЕНИЕ ИНСТРУКТОРОМ ДВИЖЕНИЕМ ДРУГИХ ВОЗДУШНЫХ СУДОВ
|
|||||||||
|
9.8.1
S, R, G
|
Управление инструктором движением других воздушных судов
|
+
|
+
|
+
|
+
|
+
|
||||
|
Инструктор должен иметь возможность управлять движением других воздушных судов
|
||||||||||
|
9.8.2
S, R
|
Корреляция
|
+
|
+
|
Переговоры с органами УВД должны соответствовать динамическим перемещениям объектов наземного и воздушного движения, включая переговоры, связанные с конфликтными ситуациями, возникающими при движении и вопросами приоритетности для самолетов
|
||||||
|
Ведение связи должны соответствовать воспроизведению другого наземного и воздушного движения в системе моделирования и бортовой системе TCAS
|
||||||||||
|
Информация о движении, воспроизводимая системой визуализации и бортовыми системами, должна соответствовать бортовой системе TCAS
|
||||||||||
|
9.8.3
S, R
|
Поток воздушного движения.
|
+
|
+
|
Примеры соответствующей интенсивности потоков воздушного движения для крупного аэропорта:
незначительная - от 1 до 15 взлетов и (или) посадок в час, либо в совокупности менее 20 операций в аэропорту в час;
средняя - от 16 до 50 взлетов и (или) посадок в час, либо в совокупности 70 операций в час;
высокая - 51 или более взлетов и (или 0 посадок в час, либо более 100 операций в час
|
||||||
|
Если иной режим не выбран инструктором, то интенсивность движения в аэропорту должна представлять собой типовое движение для данного времени суток в моделируемом аэропорту
|
||||||||||
|
Следует соблюдать типовое время эшелонирования при движении
|
||||||||||
|
9.9
|
СИСТЕМА СВЯЗИ ПО ЛИНИИ ПЕРЕДАЧИ ДАННЫХ
|
|||||||||
|
9.9.1.S
|
Бортовая система связи, адресации и передачи данных (далее - ACARS) (сеть авиационной электросвязи (далее - ATN))
|
+
|
+
|
Если установлена
|
||||||
|
9.9.3.S
|
Прочие системы
|
+
|
+
|
Если установлены
|
||||||
10. Навигация
|
10
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ НАВИГАЦИОННЫХ УСЛОВИИ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
10.S
|
Необходимы навигационные данные с соответствующим оборудованием для выполнения заходов на посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
Требуется, чтобы навигационные средства можно было использовать без ограничений в пределах дальности видимости или линии визирования в соответствии с географической зоной
|
||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ НАВИГАЦИОННЫХ УСЛОВИЙ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
10.1
|
БАЗА НАВИГАЦИОННЫХ ДАННЫХ
|
|||||||||
|
10.1.S
|
База навигационных данных, достаточная для обеспечения работы систем моделируемого самолета в реальных условиях эксплуатации
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
10.2
|
МИНИМАЛЬНЫЕ ТРЕБОВАНИЯ К АЭРОПОРТУ
|
|||||||||
|
10.2.S
|
Полная база навигационных данных, как минимум, трех аэропортов с соответствующими процедурами выполнения точных и неточных заходов на посадку, включая регулярные обновления
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
Регулярные обновления означают предписанные уполномоченным органом обновления базы навигационных данных
|
|
10.3
|
ОРГАНЫ УПРАВЛЕНИЯ НА РАБОЧЕМ МЕСТЕ ИНСТРУКТОРА
|
|||||||||
|
10.3.S
|
Органы управления на рабочем месте инструктора для внутренних и внешних навигационных средств
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
10.4
|
ХАРАКТЕРИСТИКИ ПРИЛЕТА (ВЫЛЕТА)
|
|||||||||
|
10.4.S
|
Навигационные данные со всеми соответствующими стандартными процедурами прилета и вылета
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
10.5
|
ДАЛЬНОСТЬ ДЕЙСТВИЯ НАВИГАЦИОННЫХ СРЕДСТВ
|
|||||||||
|
10.5.S
|
Требуется, чтобы навигационные средства можно было использовать без ограничений в пределах дальности видимости или линии визирования в соответствии с географической зоной
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
Моделирование географических условий с соответствующими ограничениями
|
11. Метеоусловия
|
11
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ ХАРАКТЕРИСТИК ОКРУЖАЮЩЕЙ ОБСТАНОВКИ - МЕТЕОУСЛОВИЯ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||||
|
11.R
|
Требуется полностью интегрированное динамическое моделирование окружающих условий, включая типовые атмосферные и погодные явления.
|
+
|
+
|
+
|
+
|
||||||
|
Окружающая обстановка должны быть синхронизирована с соответствующими характеристиками самолета и моделируемыми характеристиками с целью обеспечения целостности имитации. Моделирование окружающей обстановки должно включать грозы, сдвиги ветра, турбулентность, микропорывы и соответствующие виды осадков
|
|||||||||||
|
11.G
|
Должна воспроизводиться базовая модель атмосферы, давление, температура, видимость, нижняя кромка облаков и ветер
|
+
|
+
|
+
|
+
|
||||||
|
Окружающие условия должны быть синхронизированы с соответствующими характеристиками самолета и моделируемыми характеристиками с целью обеспечения целостности имитации
|
|||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ ХАРАКТЕРИСТИК ОКРУЖАЮЩЕЙ ОБСТАНОВКИ - МЕТЕОУСЛОВИЯ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||||
|
11.1
|
СТАНДАРТНАЯ АТМОСФЕРА
|
||||||||||
|
11.1.R, G
|
Моделирование стандартной атмосферы, включая управление основными параметрами со стороны инструктора
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.2
|
СДВИГ ВЕТРА
|
||||||||||
|
11.2.R
|
Должны использоваться модели сдвига ветра, обеспечивающие обучение пилотов умению распознавать попадание в такие положения, и предпринимать все необходимые действия по выходу из них на следующих критически важных этапах полета:
|
+
|
+
|
+
|
+
|
||||||
|
1)
|
до отрыва носового колеса при взлете;
|
||||||||||
|
2)
|
при отрыве от земли;
|
||||||||||
|
3)
|
на начальном этапе набора высоты;
|
||||||||||
|
4)
|
на конечном этапе захода на посадку, на высоте менее 150 м (500 футов) над уровнем земли
|
||||||||||
|
11.2.G
|
Должны использоваться модели сдвига ветра, обеспечивающие обучение пилотов умению распознавать сдвиг ветра
|
+
|
+
|
||||||||
|
11.3
|
ВЛИЯНИЕ ПОГОДНЫХ УСЛОВИЙ
|
||||||||||
|
11.3.R
|
Следующие погодные явления должны моделироваться с помощью системы визуализации, причем на рабочем месте инструктора должны быть соответствующие органы управления:
|
||||||||||
|
1)
|
многослойные облака с регулируемыми нижними и верхними кромками, заволакивание неба и разрывы в облаках;
|
+
|
+
|
+
|
+
|
||||||
|
2)
|
активация и/или деактивация грозовых фронтов;
|
+
|
+
|
+
|
+
|
||||||
|
3)
|
видимость и дальность видимости на ВПП (далее - RVR), включая влияние тумана и тумана местами;
|
+
|
+
|
+
|
+
|
||||||
|
4)
|
влияние на внешние огни самолета;
|
+
|
+
|
+
|
+
|
||||||
|
5)
|
влияние на освещение аэропорта (включая переменную интенсивность и эффекты тумана);
|
+
|
+
|
+
|
+
|
||||||
|
6)
|
загрязнение поверхности (включая эффекты порывов ветра);
|
+
|
+
|
+
|
+
|
||||||
|
7)
|
эффекты, связанные с различными осадками (дождь, град, снег);
|
+
|
+
|
+
|
+
|
||||||
|
8)
|
эффекты, связанные с воздушной скоростью в облаках;
|
+
|
+
|
+
|
+
|
||||||
|
9)
|
постепенные изменения видимости при входе в облака и выходе из них
|
+
|
+
|
+
|
+
|
||||||
|
11.3G
|
Требуется моделирование следующих погодных явлений с помощью системы визуализации, причем на рабочем месте инструктора должны быть соответствующие органы управления:
|
Требуется проведение субъективного испытания
|
|||||||||
|
Видимость
|
+
|
+
|
+
|
+
|
|||||||
|
11.4
|
ОРГАНЫ УПРАВЛЕНИЯ НА РАБОЧЕМ МЕСТЕ ИНСТРУКТОРА
|
||||||||||
|
11.4.R, G
|
Требуется моделирование следующих характеристик, причем соответствующие органы управления должны быть на рабочем месте инструктора:
|
||||||||||
|
1)
|
направление, порывы и скорость приземного ветра;
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
2)
|
скорость и направление ветра на средних и больших высотах;
|
+
|
+
|
+
|
+
|
||||||
|
3)
|
грозы и микропорывы;
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
4)
|
турбулентность
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
Для устройств без системы подвижности эффекты турбулентности должны моделироваться на приборах
|
|
12. Аэропорты и прилегающая местность
|
12
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ АЭРОПОРТОВ И ПРИЛЕГАЮЩЕЙ МЕСТНОСТИ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||||
|
12.R
|
Должны воспроизводиться модели конкретных аэропортов с их топографическими особенностями
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
Должно обеспечиваться правильное моделирование местности, направлений ВПП, разметки, освещения, размеров и рулежных дорожек. Для проведения тренировок по предотвращению столкновения исправного воздушного судна с землей (далее - CFIT) необходимо согласовать базу данных визуализации местности с базой данных улучшенной системы предупреждения о близости земли (далее - EGPWS)
|
|||||||||||
|
Если на тренажере планируется выполнять полеты в условиях ограниченной видимости, то должна воспроизводиться по крайней мере одна картина аэропорта с соответствующими функциональными характеристиками, маршрут движения по рулежной дорожке при плохой видимости, но при наличии разметки направления движения, линий "стоп", огней ограждения ВПП вместе с необходимыми огнями захода на посадку и светосигнальным оборудованием ВПП
|
|||||||||||
|
12.R(S)
|
Должны воспроизводиться модели конкретных аэропортов с их топографическими особенностями.
|
+
|
|||||||||
|
Должно обеспечиваться точное моделирование местности, направлений ВПП, разметки, освещения, размеров и рулежных дорожек. Для проведения тренировок по предотвращению CFIT необходимо согласовать базу данных визуализации местности с базой данных EGPWS
|
|||||||||||
|
Для проведения тренировок по подготовке к выполнению полетов над территорией страны из одного пункта в другой по ПВП должны воспроизводиться наземные визуальные ориентиры и другие топографические особенности, достаточные для осуществления навигации по правилам визуальных полетов согласно соответствующим картам (минимальный стандартный масштаб карт: 1:500000)
|
|||||||||||
|
12.G
|
Должны воспроизводиться модели базовых аэропортов с их топографическими особенностями
|
+
|
+
|
+
|
|||||||
|
Должно обеспечиваться точное моделирование местности, направлений ВПП, разметки, освещения, размеров и рулежных дорожек
|
|||||||||||
|
12.G(S)
|
Должны воспроизводиться модели базовых аэропортов с их топографическими особенностями
|
+
|
|||||||||
|
Должно обеспечиваться точное моделирование местности, направлений ВПП, разметки, освещения, размеров и рулежных дорожек
Для проведения тренировок по подготовке к выполнению полетов над территорией страны из одного пункта в другой по правилам ПВП должны точно воспроизводиться наземные визуальные ориентиры и другие топографические особенности, достаточные для осуществления навигации по правилам визуальных полетов согласно соответствующим картам (минимальный масштаб карт: 1:500000)
|
|||||||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ АЭРОПОРТОВ И ПРИЛЕГАЮЩЕЙ МЕСТНОСТИ
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||||
|
12.1
|
ВИЗУАЛЬНЫЕ ЭФФЕКТЫ
|
||||||||||
|
12.1.1R(S) G(S)
|
Требуется воспроизводить визуальные эффекты, позволяющие оценить скорость снижения и восприятие глубины при выполнении взлета и посадки.
Это должно включать:
|
+
|
|||||||||
|
1)
|
поверхности ВПП, рулежных дорожек и стоянок;
|
||||||||||
|
2)
|
особенности местности;
|
||||||||||
|
3)
|
детализированное и точное отображение поверхности местности в зоне, достаточной для выполнения полетов над территорией страны из одного пункта в другой по правилам ПВП
|
||||||||||
|
12.1.1R
|
Требуется воспроизводить визуальные эффекты, позволяющие оценить скорость снижения и восприятие глубины при выполнении взлета и посадки
Это должно включать:
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
1)
|
поверхности ВПП, рулежных дорожек и стоянок;
|
||||||||||
|
2)
|
особенности местности;
|
||||||||||
|
3)
|
детализированное и точное отображение поверхности местности в зоне, начинающейся примерно за 400 м (1/4 ст. мили) до начала ВПП со стороны захода на посадку и заканчивающейся приблизительно через 400 м (1/4 ст. мили) после конца ВПП с общей шириной 400 м, включая ширину ВПП
|
||||||||||
|
12.1.1G
|
Требуется воспроизводить визуальные эффекты, позволяющие оценить скорость снижения и восприятие глубины при выполнении взлета и посадки
Это должно включать:
|
+
|
+
|
+
|
|||||||
|
1)
|
поверхности ВПП, рулежных дорожек и стоянок;
|
||||||||||
|
2)
|
особенности местности
|
||||||||||
|
12.2
|
ВИЗУАЛЬНЫЕ ЭФФЕКТЫ
|
||||||||||
|
12.2.1R
|
Система должна воспроизводить визуальные эффекты:
|
+
|
+
|
+
|
+
|
+
|
+
|
Для типа тренажера I.1, положение подпункта 3) "свечение от посадочных огней в условиях низкой видимости, прежде чем станут видны сами посадочные огни" не требуется
|
|||
|
1)
|
мачт освещения;
|
||||||||||
|
2)
|
приподнятых посадочных огней;
|
||||||||||
|
3)
|
свечение от посадочных огней в условиях низкой видимости, прежде чем станут видны сами посадочные огни
|
||||||||||
|
12.3
|
ОКРУЖАЮЩАЯ ОБСТАНОВКА В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ САМОЛЕТА
|
||||||||||
|
12.3.1S, R, G
|
Авиационный тренажер должен обеспечивать точное изображение визуальной обстановки в зависимости от своего пространственного положения
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
Визуальное положение в зависимости от пространственного положения тренажера представляет собой сравнение тангажа и крена горизонта, воспроизведенных на картине визуальной обстановки, с показаниями на индикаторе авиагоризонта
Требуется только для первоначальной квалификации (приемлемо использование ЗОС)
|
|
|
12.4
|
ВИЗУАЛЬНЫЕ КАРТИНЫ АЭРОПОРТОВ
|
||||||||||
|
12.4.1.a. R
|
Система должна воспроизводить, как минимум, 3 отобранных реальных аэропорта в условиях дневного, сумеречного (заход или восход солнца) освещения, а также в ночное время
|
+
|
+
|
+
|
+
|
+
|
Отобранные реальные аэропорты должны быть частью утвержденной программы подготовки пилотов
|
||||
|
12.4.1.b. R
|
Система должна воспроизводить, как минимум, 1 отобранный реальный аэропорт в условиях дневного, сумеречного (заход или восход солнца) освещения, а также в ночное время
|
+
|
Отобранный реальный аэропорт должен быть частью утвержденной программы подготовки пилотов
|
||||||||
|
12.4.1G
|
Система должна воспроизводить базовый аэропорт в условиях дневного, сумеречного (заход или восход солнца) освещения, а также в ночное время
|
+
|
+
|
+
|
|||||||
|
12.4.2.1S, R, G
|
Возможность воспроизведения условий дневного освещения
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
Требуется ЗОС для подтверждения этой возможности системы
|
|
|
12.4.2.2S, R, G
|
Для успешного выполнения визуальных заходов на посадку, посадок и движения по территории аэропорта (руление) система должна обеспечивать воспроизведение с соответствующими текстурными качествами полноцветного изображения достаточно масштабных поверхностей
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.4.2.3R
|
Эффекты затенения поверхностей должны соответствовать моделируемому положению солнца
|
+
|
+
|
+
|
+
|
+
|
+
|
Это не подразумевает моделирование полного светового дня
|
|||
|
12.4.2.4R
|
Должно обеспечиваться детальное воспроизведение полного содержания визуальной картины, сравнимое по детализации с изображением, состоящим из 10000 видимых текстурированных поверхностей и 6000 видимых огней
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.2.4G
|
Полное содержание визуальной картины должно быть достаточным для распознавания аэропорта и воспроизведения окружающей местности
|
+
|
+
|
+
|
|||||||
|
12.4.2.5R
|
Система должна обеспечивать одновременное воспроизведение 16 движущихся объектов
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.3.1S, R
|
Возможность воспроизведения условий сумеречного освещения
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.3.2S, R
|
Система должна обеспечивать воспроизведение сумеречных визуальных картин с полноцветным изображением в условиях уменьшенной интенсивности окружающего освещения типичных характерных особенностей местности, таких как поля, дороги и водоемы, а также поверхностей, освещаемых обычными огнями самолета, достаточное для успешного выполнения визуальных заходов на посадку, посадок и движения по территории аэропорта (руление)
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.3.3R
|
Должно обеспечиваться детальное воспроизведение полного содержания визуальной картины, сравнимое по детализации с изображением, состоящим из 10000 видимых текстурированных поверхностей и 15000 видимых огней
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.3.3R
|
Для выполнения визуальных заходов на посадку, посадок и движения по территории аэропорта (руление), визуальные картины должны включать в себя самосветящиеся объекты, такие как улично-дорожные сети, освещение стоянок и световая маркировка аэропорта
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.3.4S, R
|
Система должна воспроизводить различимый горизонт
|
+
|
+
|
+
|
+
|
+
|
+
|
При наличии направленного освещения горизонт должен иметь правильную ориентацию и быть согласован с эффектами затенения поверхностей
|
|||
|
12.4.3.6R
|
Система должна обеспечивать одновременное воспроизведение 16 движущихся объектов
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.4S, R
|
Возможность воспроизведения визуальных картин в ночное время
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.4.4.1S, R
|
Система должна обеспечивать воспроизведение в ночное время всех особенностей, связанных с сумерками, и дополнительно обеспечивать воспроизведение уменьшенной интенсивности окружающего освещения, при которой уже не видны те наземные объекты, которые не являются самосветящимися, или те, которые не освещены огнями самолета
|
+
|
+
|
+
|
+
|
+
|
+
|
||||
|
12.5
|
ПОМЕХИ В АЭРОПОРТУ
|
||||||||||
|
12.5.1R
|
Модели аэропорта должны включать типичные стационарные и динамические помехи, такие как выходы терминала на посадку, самолеты и наземное оборудование
|
+
|
+
|
+
|
+
|
+
|
+
|
Помехи не обязательно должны быть динамическими, если только это специально не требуется
|
|||
|
12.6
|
АКТУАЛЬНОСТЬ БАЗЫ ДАННЫХ
|
+
|
Применимо только к авиационным тренажерам типа VII
|
||||||||
|
12.6.1R
|
Данные о конкретных аэропортах, используемых в системе, должны обновляться, чтобы они соответствовали реальным аэропортам, как указано в схемах аэропортов
|
+
|
Выбор визуальных картин аэропортов должен быть согласован с уполномоченным органом. Все изменения следует вносить в базу данных аэропорта в течение шести месяцев с момента реализации этих изменений в реальном аэропорту
|
||||||||
|
Обновление необходимо, в случае:
ввода в эксплуатацию дополнительных ВПП или рулежных дорожек;
увеличения длины или закрытия существующих ВПП;
изменения магнитных азимутов в направлении к ВПП или от нее;
при значительных изменениях терминалов аэропорта, других зданий аэропорта или окружающей местности, но это не касается второстепенных зданий или других несущественных особенностей аэропорта, которые не представлены на схемах аэропорта
|
|||||||||||
|
12.7
|
СИСТЕМА ВИЗУАЛИЗАЦИИ С ОГРАНИЧЕННОЙ ЗОНОЙ ОБЗОРА
|
Относится только к тренажерам типа I при использовании в ходе подготовки по MPL1, а также к тренажерам типа II при использовании в ходе подготовки по IR (первоначальная квалификационная отметка о праве на полеты по приборам), причем в обоих случаях разрешается использование системы визуализации с ограниченной зоной обзора
|
|||||||||
|
12.7.1G
|
Система должна обеспечивать воспроизведение визуальной картины с достаточным подробным содержанием, позволяющим пилоту успешно выполнять визуальные посадки. Визуальные картины должны включать видимый горизонт и типичные особенности местности, такие как поля, дороги, водоемы и поверхности, освещаемые посадочными фарами самолета
|
+
|
+
|
Модель аэропорта может быть базовой (не требуются конкретные топографические особенности)
|
|||||||
|
12.7.2G
|
Общее содержание визуальной картины, сопоставимое по уровню детализации с картинами, создаваемыми с помощью 3500 видимых текстурированных поверхностей и 5000 видимых точечных источников света
|
+
|
+
|
||||||||
|
12.8
|
ПОДГОТОВКА К ВЫПОЛНЕНИЮ ПОЛЕТОВ ПО ПРАВИЛАМ ВИЗУАЛЬНЫХ ПОЛЕТОВ (ПВП)
|
||||||||||
|
12.8.1S
|
Система, если она используется для подготовки к выполнению полетов по правилам визуальных полетов, должна включать базу данных, которая способна обеспечивать выполнение полета в треугольнике с размерами сторон (300 миль) с тремя аэропортами. В рамках указанной зоны система должна воспроизводить наземные визуальные ориентиры и топографические особенности, достаточные для осуществления навигации по ПВП в соответствии с картами и схемами
|
+
|
Относится только к тренажерам типа I при использовании для выполнения полетов по ПВП в ходе подготовки
|
||||||||
|
Корреляция должна осуществляться, как минимум, с навигационными картами ПВП с масштабом 1:500000, либо с более крупным масштабом, если таковые имеются для данного района
|
|||||||||||
|
12.9
|
ПОДГОТОВКА К ВЫПОЛНЕНИЮ ПОЛЕТОВ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ
|
||||||||||
|
12.9.1R
|
Система должна обеспечивать воспроизведение, как минимум, одной картины аэропорта с соответствующими функциональными характеристиками, чтобы обеспечить утвержденное использование, маршрут движения по рулежной дорожке при плохой видимости, но при наличии разметки направления движения, стоп-линий, огней ограждения ВПП вместе с необходимыми огнями захода на посадку и светосигнальным оборудованием ВПП
|
+
|
+
|
+
|
|||||||
13. Прочие характеристики
|
13
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ПРОЧИХ ХАРАКТЕРИСТИК
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||
|
13.1
|
РАБОЧЕЕ МЕСТО ИНСТРУКТОРА
|
Для всех категорий
|
Организация и условия труда на рабочих местах инструктора и других работников, осуществляющих эксплуатацию отечественных и импортных тренажеров, должно соответствовать требованиям СанПиН 2.2.4.3359-16 "Санитарно-эпидемиологические требования к физическим факторам на рабочих местах" <1>
|
|||||||
|
<1> Зарегистрированы Минюстом России 08.08.2016, регистрационный N 43153
|
||||||||||
|
13.1S
|
Рабочее место инструктора должно обеспечивать адекватный обзор приборных панелей пилотов и лобовых стекол
|
+
|
+
|
+
|
+
|
Для тренажеров с системой подвижности каждое кресло инструктора на борту должно быть надежно закреплено и оснащено в достаточной степени целостными средствами фиксации сидящего, чтобы обеспечить безопасность инструктора в процессе любых известных или предсказуемых воздействий системы подвижности
|
||||
|
13.1R
|
Рабочее место инструктора должно обеспечивать адекватный обзор приборных панелей пилотов и лобовых стекол
|
+
|
+
|
+
|
+
|
|||||
|
13.2
|
ОРГАНЫ УПРАВЛЕНИЯ НА РАБОЧЕМ МЕСТЕ ИНСТРУКТОРА
|
|||||||||
|
13.2
S, R, G
|
Для моделирования нештатных или аварийных ситуаций органы управления на рабочем месте инструктора должны обеспечивать управление всеми необходимыми системными переменными, позволять останавливать выполнения задания, выполнять сброс и вводить неисправности. Эффекты подобных неисправностей должны быть достаточными для правильной отработки процедур, приведенных в соответствующих руководствах по эксплуатации
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
13.3
|
ТЕСТЫ ДЛЯ САМОДИАГНОСТИКИ
|
|||||||||
|
13.3S
|
Должны быть проведены тесты для самодиагностики тренажера, предназначенные для определения комплексного функционирования аппаратного и программного обеспечения и для проведения быстрого и эффективного ежедневного тестирования программного и аппаратного обеспечения тренажера
|
+
|
+
|
+
|
+
|
Требуется ЗОС
|
||||
|
13.4
|
ПРОИЗВОДИТЕЛЬНОСТЬ КОМПЬЮТЕРА
|
|||||||||
|
13.4
S, R, G
|
Производительность компьютера, его точность, разрешающая способность и динамические характеристики должны быть достаточными для полного обеспечения общего уровня адекватности характеристик тренажера, необходимых для соответствия квалификационному типу
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
Требуется ЗОС
|
|
13.5
|
СРЕДСТВА АВТОМАТИЧЕСКОГО ТЕСТИРОВАНИЯ
|
|||||||||
|
13.5S
|
Должно обеспечиваться автоматическое тестирование аппаратного и программного обеспечения тренажера в соответствии с программой испытаний на соответствие характеристик тренажера характеристикам, указанным в настоящих правилах
|
+
|
+
|
+
|
+
|
Подтверждение испытания должно включать в себя идентификацию теста, номер тренажера, дату, время, условия, фамилия, имя, отчество тестирующего, допуски и соответствующие зависимые переменные, представленные в сравнении с соответствующими стандартными параметрами самолета
|
||||
|
13.5
R, G
|
Должно проводиться периодические тестирование аппаратного и программного обеспечения тренажера в соответствии с программой испытаний на соответствие характеристик тренажера характеристикам, указанным в настоящих правилах
|
+
|
+
|
+
|
+
|
Подтверждение испытаний должно включать в себя идентификацию испытания, номер тренажера, дату, время, условия, фамилия, имя отчество тестирующего, допуски и соответствующие зависимые переменные, представленные в сравнении с соответствующими стандартными параметрами самолета
|
||||
|
13.6
|
ОБНОВЛЕНИЯ АППАРАТНОГО И ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
|
|||||||||
|
13.6
S, R
|
Своевременные постоянные обновления аппаратного и программного обеспечения тренажера должны осуществляться после модификаций самолета в той степени, в какой они влияют на подготовку пилотов, причем такие обновления должны быть достаточными для обеспечения соответствия квалификационному типу
|
+
|
+
|
+
|
+
|
+
|
+
|
|||
|
13.6G
|
Своевременные постоянные обновления аппаратного и программного обеспечения тренажера должны осуществляться в соответствии с рекомендациями изготовителя тренажера, если это влияет на подготовку пилотов и/или безопасность
|
+
|
+
|
|||||||
|
13.7
|
ЕЖЕДНЕВНАЯ ПРЕДПОЛЕТНАЯ ДОКУМЕНТАЦИЯ
|
|||||||||
|
13.7
S, R, G
|
Требуется ежедневная предполетная документация, которая хранится либо в бортовом журнале, либо в таком месте, где ее можно легко найти и посмотреть
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
13.8
|
ИНТЕГРАЦИЯ СИСТЕМ
|
|||||||||
|
13.8
|
Интеграция систем
|
В качестве альтернативного средства вместо испытаний по оценке транспортной задержки можно проводить испытания скрытого времени запаздывания
|
||||||||
|
Относительная реакция системы визуализации, приборов в кабине летного экипажа и начальные воздействия системы подвижности должны быть тесно увязаны с целью обеспечения интегрированных сенсорных воздействий
|
||||||||||
|
Изменения визуальной картины в результате стационарных возмущений должны происходить в пределах динамической реакции системы порядка 100 миллисекунд (мс). Начало движения также должно происходить в рамках динамической реакции системы порядка 100 мс.
|
||||||||||
|
Начало движения должно происходить перед началом отображения первого, содержащего иную информацию, визуального кадра, а окончание движения должно происходить до окончания отображения последнего визуального кадра, связанного с визуальным моделированием этого движения. Испытание для определения соответствия этим требованиям должно включать в себя одновременную регистрацию выходного сигнала с рычагов управления по тангажу, крену и рысканию, выходного сигнала акселерометра, подключенного к платформе системы подвижности и установленного в приемлемом месте рядом с креслами пилотов, выходного сигнала дисплея системы визуализации (включая аналоговые задержки системы визуализации) и, наконец, выходного сигнала для индикатора пространственного положения самолета, либо может быть выполнено эквивалентное испытание, утвержденное уполномоченным органом
|
||||||||||
|
13.8S
|
Интервал времени, необходимый для обработки сигналов в системе авиационного тренажера с момента поступления входных воздействий от основных рычагов управления воздушным судном и до момента начала реакции системы подвижности, системы визуализации и приборов, который не зависит от задержки, характерной для имитируемого воздушного судна (далее - транспортная задержка)
|
+
|
+
|
Требуется представление результатов для приборов, системы подвижности и системы визуализации.
Дополнительные результаты испытаний по оценке транспортной задержки требуются в тех случаях, если установлены системы ИЛС, которые моделируются, а не являются системами реального самолета
Требуется проведение дополнительных испытаний, если режим работы системы визуализации (светлое время, сумерки и ночное время суток) может влиять на характеристики воспроизведения Требуется ЗОС, если режим работы системы визуализации не влияет на характеристики воспроизведения, что устраняет необходимость проведения дополнительных испытаний
|
||||||
|
Испытание по оценке транспортной задержки может быть использовано для демонстрации того, что время реакции системы тренажера не превышает 100 мс
|
||||||||||
|
Если установлены системы EFVS, то они должны реагировать в пределах +/- 30 мс относительно системы визуализации, но не раньше реакции системы подвижности
|
||||||||||
|
Транспортная задержка
|
+
|
|||||||||
|
Испытание по оценке транспортной задержки может быть использовано для демонстрации того, что время реакции системы тренажера не превышает 150 мс.
|
||||||||||
|
13.8 R, G
|
Транспортная задержка
|
+
|
+
|
+
|
+
|
+
|
Результаты необходимы только для соответствующих систем
|
|||
|
Транспортная задержка может быть использована для демонстрации того, что время реакции системы тренажера не превышает 200 мс
|
||||||||||
Таблица B1
|
ИСПЫТАНИЕ
|
ДОПУСК
|
УСЛОВИЯ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||||
|
1.
|
ХАРАКТЕРИСТИКА
|
|||||||||||||
|
1.a
|
Руление
|
|||||||||||||
|
1.a
|
1)
|
Разворот с минимальным радиусом
|
+/- 0,9 м (3 фута) или
+/- 20% от радиуса разворота
|
На земле
|
+
|
+
|
+
|
Нанести на график местоположения опор основных и носового шасси и основные параметры двигателя. Данные для режима без использования тормозов, для минимальной тяги, требуемой для выполнения установившегося разворота; за исключением самолетов, для которых необходимо использование несимметричной тяги или тормозов для выполнения разворота с минимальным радиусом
|
||||||
|
1.a
|
2)
|
Угловая скорость разворота в зависимости от угла поворота носового колеса
|
+/- 10%
или
+/- 2°/с по угловой скорости разворота
|
На земле
|
+
|
+
|
+
|
Регистрация как минимум двух значений скорости разворота, превышающих скорость разворота с минимальным радиусом, причем одна скорость разворота при типичной скорости руления, а вторая, отличающаяся от типичной скорости руления по крайней мере на 9,26 км/ч (5 узлов)
|
||||||
|
1.b
|
Взлет
|
Используемые изготовителями самолетов сертифицированные установки закрылков при взлете должны быть протестированы один раз при минимальной скорости отрыва (1.b.3), при выполнении нормального взлета (1.b.4) и при отказе критического двигателя на взлете (1.b.5) или в процессе взлета при боковом ветре (1.b.6)
|
||||||||||||
|
1.b
|
1)
|
Время и дистанция разбега на ВПП
|
+/- 1,5 с или
+/- 5% от времени; и
+/- 61 м (200 фут) или
+/- 5% от дистанции
|
Взлет
|
+
|
+
|
+
|
Время и дистанция разгона должны регистрироваться в течение, как минимум, 80% полного времени от момента отпускания тормозов до достижения скорости отрыва носового колеса.
|
||||||
|
Для устройств типа I, III и VI:
+/- 1,5 с или +/- 5% от времени разгона
|
+
|
+
|
+
|
Данные на графике должны наноситься с использованием соответствующих масштабов для каждой части маневра
|
||||||||||
|
1.b
|
2)
|
Минимальная эволютивная скорость разбега (Vmcg), с использованием только аэродинамических поверхностей управления в соответствии с применяемым требованием летной годности или альтернативное испытание с неработающим двигателем для демонстрации характеристик управляемости на земле
|
+/- 25% от достигнутого максимального бокового отклонения самолета или же +/- 1,5 м (5 фут)
|
Взлет
|
+
|
+
|
+
|
Скорость при отказе двигателя должна быть в пределах +/-1,852 км/ч (+/-1 узел) скорости самолета в момент отказа двигателя. Падение тяги двигателя должно соответствовать данным математической модели для варианта двигателя, применимого к испытываемому тренажеру. Если моделируемый двигатель не соответствует двигателю, прошедшему летные испытания изготовителя самолета, то можно провести дополнительное испытание при тех же начальных условиях, используя в качестве управляющего параметра тягу из данных летных испытаний. Для обеспечения управления только с помощью аэродинамических поверхностей, управление носовым колесом должно быть отключено (пассивно ориентирующееся колесо), либо носовое колесо должно быть приподнято над землей
|
||||||
|
Для самолетов с обратимыми системами управления полетом:
|
||||||||||||||
|
+/- 10% или +/- 2,2 даН (5 фунт-силы) от усилия на педаль управления
|
||||||||||||||
|
Если испытание Vmcg провести невозможно, то приемлемой альтернативой является летное испытание с резким уменьшением числа оборотов двигателя до малого газа при скорости между значениями V1 и V1 - 18,52 км/ч (10 узлов), после чего управление по курсу обеспечивается только с помощью аэродинамических органов, а восстановление положения осуществляется, когда основные стойки шасси уже на земле
|
||||||||||||||
|
1.b
|
3)
|
Минимальная скорость отрыва при взлете (Vmu) или эквивалентное испытание для демонстрации характеристик в случае преждевременного отрыва носового колеса от земли при взлете
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет
|
+
|
+
|
+
|
Минимальная скорость отрыва при взлете Vmu определяется как минимальная скорость, при которой последняя стойка основного шасси отрывается от земли. При этом должен регистрироваться сигнал обжатия стойки основного шасси. Если испытание Vmu провести невозможно, то альтернативными приемлемыми летными испытаниями являются следующие: разбег при взлете с большим углом тангажа с постоянной скоростью, включая отрыв от земли стоек основного шасси или взлет с преждевременным отрывом переднего колеса
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
Если выбирается одно из этих альтернативных решений, то должна активизироваться функция защиты от удара о землю задней части фюзеляжа или хвоста самолета, если она имеется на самолете
|
||||||||||||||
|
Должны регистрироваться изменения данных по времени, начиная со скорости 18,52 км/ч (10 узлов) перед началом отрыва носового колеса от земли и до момента времени не менее 5 с после момента отрыва от земли стоек основного шасси
|
||||||||||||||
|
1.b
|
4)
|
Нормальный взлет
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет
|
+
|
+
|
+
|
Необходимы данные о близкой к максимальной сертифицированной взлетной массе при среднем положении центра тяжести и о малой взлетной массе при заднем расположении центра тяжести. Если самолет имеет более одной сертифицированной взлетной конфигурации, то для каждой величины массы должна использоваться своя конфигурация
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
+/- 6 м (20 футов) по относительной высоте
|
Регистрируется профиль взлета, начиная с момента отпускания тормозов до достижения высоты минимум 61 м (200 футов) над уровнем земли
|
|||||||||||||
|
Для самолетов с обратимыми системами управления полетом:
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на рулевую колонку
|
Испытание может использоваться для определения времени и дистанции разбега на ВПП
|
|||||||||||||
|
Данные на графике должны наноситься с использованием соответствующих масштабов для каждой части маневра
|
||||||||||||||
|
1.b
|
5)
|
Отказ критического двигателя при взлете
|
+/- 5,56 км/ч (+/-3 узла) по воздушной скорости
|
Взлет
|
+
|
+
|
+
|
Регистрируется профиль взлета до достижения высоты минимум 61 м (200 футов) над уровнем земли
|
||||||
|
+/- 1,5° по углу тангажа
|
Скорость при отказе двигателя должна быть в пределах +/- 5,56 км/ч (+/- 3 узла) относительно самолетных данных
|
|||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
+/- 6 м (20 футов) по высоте
|
Испытание проводится при массе, близкой к максимальной сертифицированной взлетной массе
|
|||||||||||||
|
+/- 2° по углу крена
|
||||||||||||||
|
+/- 2° по углу бокового скольжения
|
||||||||||||||
|
+/- 3° по курсовому углу
|
||||||||||||||
|
Для самолетов с обратимыми системами управления полетом:
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на рулевую колонку;
|
||||||||||||||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия на штурвал;
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на педаль управления
|
||||||||||||||
|
1.b
|
6)
|
Взлет при боковом ветре
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет
|
+
|
+
|
+
|
Регистрируется профиль взлета, начиная с момента отпускания тормозов до достижения высоты минимум 61 м (200 футов) над уровнем земли
|
||||||
|
+/- 1,5° по углу тангажа
|
Для этого испытания необходимы данные испытаний, включая профиль ветра для составляющей бокового ветра как минимум 60% от величины эксплуатационной характеристики для самолета, измеренной на высоте 10 м (33 фута) над ВПП
|
|||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
+/- 6 м (20 футов) по относительной высоте
|
||||||||||||||
|
+/- 2° по углу крена
|
||||||||||||||
|
+/- 2° по углу бокового скольжения
|
Компоненты скорости ветра должны быть предоставлены в форме величин встречного (лобового) ветра и бокового ветра относительно ВПП
|
|||||||||||||
|
+/- 3 ° по курсовому углу
|
||||||||||||||
|
Правильные направления для руля направления, педали управления и курсового угла при величинах путевой скорости ниже 74 км/ч (40 узлов)
|
||||||||||||||
|
Для самолетов с обратимыми системами управления полетом:
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на рулевую колонку;
|
||||||||||||||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия на штурвал;
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на педаль управления
|
||||||||||||||
|
1.b
|
7)
|
Прерванный взлет
|
Взлет
|
+
|
+
|
+
|
Регистрируется при массе, близкой к максимальной сертифицированной взлетной массе
|
|||||||
|
+
|
||||||||||||||
|
+
|
+
|
Скорость в момент прерывания взлета должна составлять как минимум 80% от V1.
Автоматическое торможение используется, когда это применимо
|
||||||||||||
|
Используется максимальное усилие торможения в автоматическом или ручном режиме
|
||||||||||||||
|
Если отсутствует возможность продемонстрировать максимальное торможение, приемлемой альтернативой является проведение испытания с использованием приблизительно 80% от усилия торможения и полного реверса, если это применимо
|
||||||||||||||
|
Время и расстояние должны регистрироваться с момента отпускания тормозов и до полной остановки самолета
|
||||||||||||||
|
Для устройств типа I, III и VI время регистрируется в течение как минимум 80% от интервала времени с момента инициализации прерванного взлета до полной остановки самолета
|
||||||||||||||
|
1.b
|
8)
|
Динамический отказ двигателя после взлета
|
+/- 2% или +/- 20% от угловой скорости фюзеляжа
|
Взлет
|
+
|
+
|
+
|
Скорость при отказе двигателя должна быть в пределах +/- 5,56 км/ч (+/- 3 узла) относительно самолетных данных
|
||||||
|
Отказ двигателя может представлять собой резкое уменьшение числа оборотов до режима малого газа
|
||||||||||||||
|
Регистрация процесса полета без участия пилота, начиная с момента времени за 5 с до отказа двигателя и до + 5 с после отказа двигателя или до момента достижения угла крена в 30, в зависимости от того, что произойдет первым
|
||||||||||||||
|
По соображениям безопасности летные испытания проводиться вне эффекта влияния земли на безопасной высоте, однако в правильной конфигурации и на соответствующей воздушной скорости
|
||||||||||||||
|
Самолет с компьютерным управлением: Испытания должны проводиться при штатном и нештатном состоянии системы управления
|
||||||||||||||
|
1.c
|
Набор высоты
|
|||||||||||||
|
1.c
|
1)
|
Нормальный набор высоты со всеми работающими двигателями
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Конфигурация с убранными закрылками и шасси
|
+
|
ПНВ <1>
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Предпочтительно использовать данные летных испытаний, тем не менее приемлемой альтернативой являются данные из руководства по эксплуатации самолета
|
|
|
+/- 0,5 м/с (100 фут/мин) или +/- 5% от скорости набора высоты
|
Регистрация ведется при номинальной скорости набора высоты и на средней высоте начального участка набора высоты
|
|||||||||||||
|
Характеристики тренажера должны регистрироваться на интервале как минимум 300 м (1000 футов)
|
||||||||||||||
|
Для тренажеров типа I, II, III, IV и VI данное испытание может проводиться в виде теста моментального состояния
|
||||||||||||||
|
<1> Правильные направление и величина
|
||||||||||||||
|
1.c
|
2)
|
2 участок набора высоты с одним неработающим двигателем
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
2-й участок набора высоты
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Предпочтительны данные летных испытаний, тем не менее, приемлемой альтернативой являются данные из руководства по эксплуатационным характеристикам самолета
|
|
|
+/- 0,5 м/с (100 фут/мин) или +/- 5% от вертикальной скорости набора высоты, но не меньше, указанной в требованиях руководства по эксплуатационным характеристикам самолета
|
Регистрация ведется при номинальной скорости набора высоты
|
|||||||||||||
|
Характеристики тренажера должны регистрироваться на интервале как минимум 300 м (1000 футов)
|
||||||||||||||
|
Испытание проводится при граничных условиях (вес, высота и температура)
|
||||||||||||||
|
Для устройств типа I, II, III, IV и VI данное испытание может представлять собой испытание в виде теста моментального состояния
|
||||||||||||||
|
1.c
|
3)
|
Набор высоты с одним неработающим двигателем при выполнении полета по маршруту
|
+/- 10% от интервала времени
|
Конфигурация с убранными закрылками и шасси
|
+
|
+
|
+
|
Могут использоваться данные летных испытаний или данные из руководства по эксплуатационным характеристикам самолета.
|
||||||
|
+/- 10% от величины дистанции
|
||||||||||||||
|
+/- 10% от использованного количества топлива
|
Испытание проводится на участке как минимум 1550 м (5000 футов)
|
|||||||||||||
|
1.c
|
4)
|
Набор высоты в посадочной конфигурации с одним неработающим двигателем с учетом обледенения, если это предусмотрено в руководстве по эксплуатационным характеристикам самолета для этого этапа полета
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Заход на посадку
|
+
|
+
|
+
|
Могут использоваться данные летных испытаний или данные из руководства по эксплуатационным характеристикам самолета
|
||||||
|
+/- 0,5 м/с (100 фут/мин) или +/- 5% от вертикальной скорости набора высоты, но не меньше вертикальной скорости набора высоты, указанной в руководстве по эксплуатационным характеристикам самолета
|
Характеристики тренажера должны регистрироваться на интервале, как минимум, 300 м (1000 футов)
|
|||||||||||||
|
Испытание проводится при близкой к максимальной сертифицированной посадочной массе, применимой в отношении захода на посадку в условиях обледенения
|
||||||||||||||
|
Самолет должен иметь конфигурацию со всеми нормально функционирующими противообледенительными и антиобледенительными системами, а также с убранными шасси и при положении закрылков для ухода на второй круг
|
||||||||||||||
|
Должны применяться все методы учета обледенения в соответствии с данными руководства по эксплуатационным характеристикам самолета, относящимся к заходу на посадку в условиях обледенения
|
||||||||||||||
|
1.d
|
Крейсерский полет и снижение
|
|||||||||||||
|
1.d
|
1)
|
Ускорение в режиме горизонтального полета
|
+/- 5% от интервала времени
|
Крейсерский полет
|
+
|
+
|
+
|
+
|
+
|
+
|
Интервал времени, необходимый для увеличения воздушной скорости как минимум на 92,6 км/ч (50 узлов) с использованием номинальной или эквивалентной тяги
|
|||
|
Для самолетов с небольшим диапазоном эксплуатационных скоростей полета, изменение скорости может быть уменьшено до уровня 80% от изменения эксплуатационной скорости
|
||||||||||||||
|
1.d
|
2)
|
Торможение в горизонтальном полете
|
+/- 5% от интервала времени
|
Крейсерский полет
|
+
|
+
|
+
|
+
|
+
|
+
|
Интервал времени, необходимый для уменьшения воздушной скорости как минимум на 92,6 км/ч (50 узлов) с использованием режима малого газа
|
|||
|
Для самолетов с небольшим диапазоном эксплуатационных скоростей полета изменение скорости может быть уменьшено до уровня 80% от изменения эксплуатационной скорости
|
||||||||||||||
|
1.d
|
3)
|
Характеристики крейсерского режима полета
|
+/- 0,05% по степени повышения давления в двигателе (EPR) или +/- 3% от N1 или +/- 5% от крутящего момента
|
Крейсерский полет
|
+
|
+
|
+
|
+
|
+
|
+
|
Испытание может быть в виде одного теста моментального состояния с указанием мгновенного расхода топлива, или же, как минимум, двух последовательных тестов моментального состояния с разбросом как минимум в 3 мин в режиме установившегося полета
|
|||
|
+/-5% от расхода топлива
|
||||||||||||||
|
1.d
|
4)
|
Снижение на режиме малого газа
|
+/- 5,56 км/ч (+/-3 узла) по воздушной скорости
|
Конфигурация с убранными закрылками и шасси
|
+
|
+
|
+
|
Снижение на установившемся режиме малого газа с нормальной скоростью снижения при среднем значении высоты
|
||||||
|
+/- 1,0 м/с (200 фут/мин) или +/- 5% от скорости снижения
|
Характеристики тренажера должны регистрироваться на интервале как минимум 300 м (1000 футов)
|
|||||||||||||
|
1.d
|
5)
|
Аварийное снижение
|
+/- 9,26 км/ч (+/- 5 узлов) по воздушной скорости
|
Согласно данным об эксплуатационных характеристиках самолета
|
+
|
+
|
+
|
Снижение в установившемся режиме должно осуществляться с выпущенными аэродинамическими тормозами, если это применимо, на средней высоте со скоростью, близкой к максимальной эксплуатационной скорости) или в соответствии с правилами аварийного снижения
|
||||||
|
+ 1,5 м/с (300 фут/мин) или +/- 5% от скорости снижения
|
||||||||||||||
|
Характеристики тренажера должны регистрироваться на интервале как минимум 900 м (3000 футов)
|
||||||||||||||
|
1.e
|
Остановка самолета
|
|||||||||||||
|
1.e
|
1)
|
Время и дистанция торможения, ручное управление колесными тормозами, сухая ВПП, без применения реверса тяги
|
+/- 1.5 с или +/- 5% от интервала времени
|
Посадка
|
+
|
+
|
+
|
Время и дистанцию следует регистрировать как минимум в течение 80% от полного интервала времени, начиная с момента касания земли до полной остановки самолета
|
||||||
|
Для дистанций до 1220 м (4000 футов) наименьшая величина +/- 61 м (200 футов) или +/- 10% от величины дистанции
|
||||||||||||||
|
Положение тормозных интерцепторов и давление в тормозной системе должны представляться в виде графиков (если это применимо)
|
||||||||||||||
|
Для дистанций больше 1220 м (4000 футов) +/- 5% от величины дистанции
|
Необходимы данные для средней и близкой к максимальной сертифицированной посадочной массе.
Инженерные данные могут использоваться для условий, соответствующих средней массе
|
|||||||||||||
|
1.e
|
2)
|
Время и дистанция торможения, реверс тяги, без использования колесных тормозов, сухая ВПП
|
+/- 1,5 с или +/- 5% от интервала времени и меньше +/- 61 м (200 футов) или +/- 10% от величины дистанции
|
Посадка
|
+
|
+
|
+
|
Время и дистанцию необходимо регистрировать как минимум в течение 80% от полного интервала времени с момента включения реверса тяги до минимальной эксплуатационной скорости при полном реверсе тяги
|
||||||
|
Положение тормозных интерцепторов должно представляться в виде графика (если применимо)
|
||||||||||||||
|
Необходимы данные для средней и близкой к максимальной сертифицированной посадочной массе
|
||||||||||||||
|
Инженерные данные могут использоваться для условий, соответствующих средней массе
|
||||||||||||||
|
1.e
|
3)
|
Дистанция торможения до полной остановки самолета с использованием колесных тормозов, мокрая ВПП
|
+/- 61 м (200 футов) или +/- 10% от величины дистанции
|
Посадка
|
+
|
+
|
+
|
Требуется использовать данные летных испытаний, либо данные из руководства изготовителя по эксплуатационным характеристикам самолета, если таковые имеются
|
||||||
|
Приемлемой альтернативой являются инженерные данные на основе дистанции торможения до остановки самолета, полученные в процессе летных испытаний на сухой ВПП, и с учетом влияния загрязнения ВПП на значения коэффициентов торможения
|
||||||||||||||
|
1.e
|
4)
|
Дистанция торможения до полной остановки самолета, при использовании колесных тормозов, обледеневшая ВПП
|
+/- 61 м (200 футов) или +/- 10% от величины дистанции
|
Посадка
|
+
|
+
|
+
|
Требуется использовать данные летных испытаний, либо данные из руководства по эксплуатационным характеристикам самолета от изготовителя, если они есть
|
||||||
|
Приемлемой альтернативой являются инженерные данные на основе дистанции торможения до остановки самолета, полученные в процессе летных испытаний на сухой ВПП, и с учетом влияния загрязнения ВПП на значения коэффициентов торможения
|
||||||||||||||
|
1.f
|
Двигатели
|
|||||||||||||
|
1.f
|
1)
|
Приемистость
|
+/- 10% от Ti или +/- 0,25 с;
+/- 10% от Tt или +/- 0,25 с
|
Заход на посадку или посадка
|
+
|
+
|
+
|
Ti - полное время от начала перемещения рычага управления двигателем (далее - РУД) до момента, когда суммарная реакция критического параметра двигателя превысит режим малого газа на 10%.
|
||||||
|
Для устройств типа I, III и VI:
+/- 10% от Ti или +/- 1 с;
+/- 10% от Tt или +/- 1 с.
|
+
|
+
|
+
|
Tt - полное время от начала перемещения РУД до момента, когда суммарная реакция критического параметра двигателя превысит режим малого газа на 90%.
|
||||||||||
|
Для устройств типа II и IV:
+/- 10% от Ti или +/- 1 с;
+/- 10% от Tt или +/- 1 с
|
ПНВ
|
ПНВ
|
Полная реакция представляет собой постепенное изменение критического параметра двигателя от режима малого газа до режима ухода на второй круг
|
|||||||||||
|
1.f
|
2)
|
Торможение
(уменьшение числа оборотов двигателя)
|
+/- 10% от Ti или +/- 0,25 с;
и +/- 10% от Tt или +/- 0,25 с
|
На земле
|
+
|
+
|
+
|
Ti - полное время от начала движения РУД до момента, когда суммарная реакция критического параметра двигателя будет меньше максимальной взлетной мощности на 10%
|
||||||
|
Для устройств типа I, III и VI:
+/- 10% Ti или +/- 1 с;
+/- 10% Tt или +/- 1 с
|
+
|
+
|
+
|
Tt - полное время от начала движения РУД до момента, когда суммарная реакция критического параметра двигателя будет меньше максимальной взлетной мощности на 90%
|
||||||||||
|
Для устройств типа II и IV:
+/- 10% от Ti или +/- 1 с;
+/- 10% от Tt или +/- 1 с
|
ПНВ
|
ПНВ
|
Полная реакция представляет собой постепенное изменение критического параметра двигателя от уровня максимальной взлетной мощности до режима малого газа
|
|||||||||||
|
ИСПЫТАНИЕ
|
ДОПУСК
|
УСЛОВИЯ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||||
|
2
|
ХАРАКТЕРИСТИКИ УПРАВЛЯЕМОСТИ
|
|||||||||||||
|
2.a
|
Проверки статических характеристик управления
|
|||||||||||||
|
2.a
|
1)
|
Калибровка усилий на рычагах управления по тангажу и положения управляющей поверхности в зависимости от положения рычага управления по тангажу
|
+/-0,9 даН (2 фунт-силы) по усилию страгивания
|
На земле
|
+
|
+
|
+
|
+
|
+
|
+
|
Непрерывный полный ход рычага управления от упора до упора. Результаты испытаний должны проверяться с помощью данных летных испытаний, испытаний на продольную статическую устойчивость, на сваливание
|
|||
|
+/- 2,2 даН (5 фунт-силы) или +/-10% от усилия
|
||||||||||||||
|
+/- 2° по углу отклонения руля высоты
|
||||||||||||||
|
Усилия на рычаге управления по тангажу в зависимости от его положения
|
+/- 0,9 даН (2 фунт-силы) по усилию страгивания
|
Заход на посадку
|
ПНВ
|
ПНВ
|
ПНВ
|
Усилия на рычаги управления и их перемещения должны в целом соответствовать усилиям и перемещениям рычагов управления класса моделируемых самолетов
|
||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия
|
||||||||||||||
|
2.a
|
2)
|
Калибровка усилий на рычаге управления по крену и положения управляющей поверхности в зависимости от положения рычага управления по крену
|
+/- 0,9 даН (2 фунт-силы) по усилию страгивания
|
На земле
|
+
|
+
|
+
|
+
|
+
|
+
|
Непрерывный полный ход рычага управления от упора до упора. Результаты испытаний должны проверяться с помощью данных летных испытаний, испытаний на продольную статическую устойчивость, на сваливание
|
|||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия
|
||||||||||||||
|
+/- 2° по углу отклонения элеронов
|
||||||||||||||
|
+/- 3 по углу отклонения интерцепторов
|
||||||||||||||
|
Усилия на рычаге управления по крену в зависимости от его положения
|
+/- 0,9 даН (2 фунт-силы) по усилию страгивания
|
Заход на посадку
|
ПНВ
|
ПНВ
|
ПНВ
|
Усилия на рычаги управления и перемещения рычагов управления должны в целом соответствовать усилиям и перемещениям рычагов управления класса моделируемых самолетов
|
||||||||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия
|
||||||||||||||
|
2.a
|
3)
|
Калибровка усилий на педалях управления рулем направления и положения управляющей поверхности в зависимости от положения педалей управления рулем направления
|
+/- 2,2 даН (5 фунт-силы) по усилию страгивания
|
На земле
|
+
|
+
|
+
|
+
|
+
|
+
|
Непрерывный полный ход педалей управления от упора до упора. Результаты испытаний должны проверяться с помощью данных летных испытаний, испытаний на продольную статическую устойчивость, на сваливание
|
|||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия
+/- 2° по углу отклонения элеронов
|
||||||||||||||
|
Усилия на педалях управления рулем направления в зависимости от их положения
|
+/- 2,2 даН (5 фунт-силы) по усилию страгивания
|
Заход на посадку
|
ПНВ
|
ПНВ
|
ПНВ
|
Усилия на педали управления и перемещения педалей управления должны в целом соответствовать усилиям и перемещениям педалям управления класса моделируемых самолетов
|
||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия
|
||||||||||||||
|
2.a
|
4)
|
Калибровка усилий на рычаге управления носовым колесом и положения носового колеса в зависимости от положения рычага управления носовым колесом
|
+/- 0,9 даН (2 фунт-силы) по усилию страгивания
|
На земле
|
ПНВ
|
+
|
+
|
+
|
+
|
+
|
Непрерывный полный ход рычага управления от упора до упора
|
|||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия
|
||||||||||||||
|
+/- 2° по углу поворота носового колеса
|
+
|
+
|
+
|
+
|
+
|
+
|
||||||||
|
2.a
|
5)
|
Калибровка положения носового колеса в зависимости от положения педалей управления рулем направления
|
+/- 2° по углу поворота носового колеса
|
На земле
|
+
|
+
|
+
|
+
|
+
|
+
|
Непрерывный полный ход рычага управления от упора до упора
|
|||
|
2.a
|
6)
|
Калибровка триммирования по тангажу, в зависимости от положения управляющей поверхности
|
+/- 0,5° по углу отклонения триммера
|
На земле
|
+
|
+
|
+
|
Цель данного испытания - сравнение положений поверхности на тренажере и показаний индикатора с запрограммированными величинами
|
||||||
|
+/- 1,0° по углу отклонения триммера
|
На земле
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
||||||||
|
2.a
|
7)
|
Скорость триммирования по тангажу
|
+/- 10% от величины скорости триммирования или
|
На земле и заход на посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
Скорость триммирования необходимо проверять при первом включении триммера пилотом (на земле) и при первом включении триммера автопилотом или пилотом в полете или в ситуации ухода на второй круг
|
|||
|
+/- 0,1°/с по скорости триммирования
|
||||||||||||||
|
2.a
|
8)
|
Калибровка РУД
|
При согласовании параметров двигателя:
+/- 5° по углу отклонения РУД При согласовании фиксаторов:
+/- 3% от N1 или +/- 0,03 от степени повышения давления в двигателе или +/- 3% от крутящего момента, или эквивалентные значения
|
На земле
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Одновременная регистрация для всех двигателей. Допуски применяются по отношению к самолетным данным
|
|
|
Для самолетов с фиксируемыми положениями РУД должны представляться все фиксируемые положения, а также как минимум, одно положение между фиксируемыми положениями или концевыми точками (если это применимо). Для самолетов без фиксируемых положений РУД должны представляться концевые точки и как минимум три других положения
|
||||||||||||||
|
Допустимо использование данных, полученных на испытываемом самолете или на инженерном тренажере при условии, что используется соответствующий блок управления двигателем (как в отношении оборудования, так и программного обеспечения)
|
||||||||||||||
|
Если рычаги не имеют угловых перемещений, то применяется допуск величиной +/- 2 см (+/- 0,8 дюйма)
|
||||||||||||||
|
Что касается винтовых самолетов, то при наличии дополнительного рычага, обычно называемого рычагом управления воздушным винтом, этот дополнительный рычаг также должен быть проверен
Может быть представлена серия векторов мгновенного состояния
|
||||||||||||||
|
2.a
|
9)
|
Калибровка давления в тормозной системе и усилий на педали тормоза в зависимости от положения педали тормоза
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия
|
На земле
|
+
|
+
|
+
|
Для демонстрации соответствия разрешается использовать результаты расчетов компьютера тренажера
|
||||||
|
+/- 1,0 МПа (150 фунт/кв. дюйм) или
+/- 10% от давления в тормозной системе
|
В ходе проведения наземного статического испытания необходимо сопоставлять величины давления в гидравлической системе с положениями педали
|
|||||||||||||
|
Для устройств типа I, III и VI:
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия
|
ПНВ
|
+
|
+
|
Следует проверять педальные посты как правого так и левого пилотов
|
||||||||||
|
2.b
|
Проверки динамических характеристик управления
|
|||||||||||||
|
Испытания 2.b.1, 2.b.2 и 2.b.3 не применяются к тренажеру, если управляющие усилия полностью формируются с помощью оригинального самолетного блока управления, установленного на тренажере. Мощность (тяга) может быть такой, которая необходима для выполнения горизонтального полета, если не оговорено иное
|
||||||||||||||
|
2.b
|
1)
|
Управление по тангажу
|
Для систем с недостаточным демпфированием:
T(P0) +/- 10% от P0 или +/- 0,05 с
T(P1) +/- 20% от P1 или +/- 0,05 с.
T(P2) +/- 30% от P2 или +/- 0,05 с
T(Pn) +/- 10 (n + 1)% от Pn или +/- 0,05 с
T(An) - 10% от Amax, где Amax - максимальная амплитуда или +/- 0.5% от полного хода рычага управления (от упора до упора)
|
Взлет, крейсерский режим
|
+
|
+
|
+
|
Должны представляться данные для нормальных отклонений рычагов управления в обоих направлениях (примерно от 25% до 50% полного хода или от 25% до 50% максимально допустимого отклонения рычага управления по тангажу для режимов полета, ограниченных областью маневренных перегрузок)
|
||||||
|
Допуски применяются к абсолютным величинам для каждого периода (рассматриваемого отдельно)
|
||||||||||||||
|
n - последовательный период полного колебания
|
||||||||||||||
|
Зона нечувствительности T(Ad) +/- 5% от Ad или +/- 0,5% от максимального хода рычага управления
|
||||||||||||||
|
+/- 1 значимых перерегулирований (минимум от 1 значимого перерегулирования)
|
||||||||||||||
|
Стационарное положение в пределах зоны нечувствительности
|
||||||||||||||
|
Допуски не должны применяться к периоду или амплитуде после последнего значимого перерегулирования
|
||||||||||||||
|
Колебания в пределах допусков не считаются значимыми и допуски к ним не применяются
|
||||||||||||||
|
Только для систем с избыточным демпфированием и с критическим демпфированием применимы следующие допуски:
T(P0) +/- 10% от P0 или +/- 0,05 с
|
||||||||||||||
|
2.b
|
2)
|
Управление по крену
|
То же самое, что и в пункте 2.b.1
|
Взлет, крейсерский режим и посадка
|
+
|
+
|
+
|
Должны быть представлены данные для нормальных отклонений рычагов управления (примерно от 25% до 50% от полного хода или примерно от 25% до 50% максимально допустимого отклонения рычага управления по крену для режимов полета, ограниченных областью маневренных нагрузок)
|
||||||
|
2.b
|
3)
|
Управление по рысканию
|
То же, что и в пункте 2.b.1
|
Взлет, крейсерский режим и посадка
|
+
|
+
|
+
|
Должны представляться данные для нормальных отклонений рычагов управления (примерно от 25% до 50% от полного хода)
|
||||||
|
2.b
|
4)
|
Незначительные отклонения рычага управления по тангажу
|
+/- 0,15°/с по скорости тангажа фюзеляжа или +/- 20% от максимальной скорости тангажа фюзеляжа применительно к процессу изменения по времени
|
Заход на посадку или посадка
|
+
|
+
|
+
|
Отклонения рычагов управления должны быть типичными для незначительных поправок как при заходе на посадку по приборам (скорость тангажа примерно от 0,5°/с до 2°/с)
|
||||||
|
Испытание проводится в обоих направлениях
|
||||||||||||||
|
Демонстрация данных, описывающих изменение по времени, начиная от момента 5 с перед началом отклонения рычага управления до, как минимум, 5 с после начала отклонения рычага управления
|
||||||||||||||
|
Если для демонстрации обоих направлений проводится одно испытание, то перед перемещением рычага управления в обратном направлении должно пройти как минимум 5 с.
|
||||||||||||||
|
Самолет с компьютерным управлением: Испытание проводится в штатном и нештатном режимах управления
|
||||||||||||||
|
2.b
|
5)
|
Незначительные отклонения рычага управления по крену
|
+/- 0,15% от скорости крена фюзеляжа или +/- 20% от максимальной скорости крена применительно к процессу изменения по времени.
|
Заход на посадку или посадка
|
+
|
+
|
+
|
Отклонения рычагов управления должны быть типичными для незначительных поправок при заходе на посадку по приборам (скорость крена приблизительно от 0,5°/с до 2°/с)
|
||||||
|
Испытание проводится в одном направлении. Для самолетов с несимметричными характеристиками испытание проводятся в обоих направлениях
|
||||||||||||||
|
Демонстрация данных, описывающих изменение по времени, начиная от момента 5 с перед началом отклонения рычага управления до момента как минимум 5 с после начала отклонения рычага управления. Если для демонстрации обоих направлений проводится одно испытание, то перед перемещением органа управления в обратном направлении должно пройти как минимум 5 с.
|
||||||||||||||
|
Самолет с компьютерным управлением: Испытание проводится в штатном и нештатном режимах управления
|
||||||||||||||
|
2.b
|
Самолет с компьютерным управлением:
|
+/- 0,15/с от скорости рыскания фюзеляжа или
+/- 20% от максимальной скорости рыскания фюзеляжа применительно к процессу изменения по времени
|
Заход на посадку или посадка
|
+
|
+
|
+
|
При заходе на посадку по приборам отклонения рычага управления должны быть типичными для незначительных поправок (скорость рыскания примерно от 0,5°/с до 2°/с).
Испытания проводятся в обоих направлениях. Демонстрация данных, описывающих изменение по времени, начиная от 5 с перед началом отклонения рычага управления до, как минимум, 5 с после начала отклонения рычага управления.
Если для демонстрации обоих направлений используется одно испытание, то перед перемещением органа управления в обратном направлении должно пройти как минимум 5 с.
Самолет с компьютерным управлением: Испытание проводится в штатном и нештатном режимах управления
|
|||||||
|
Незначительные отклонения рычага управления по рысканию
|
||||||||||||||
|
2.c
|
Продольное движение
|
Установленная тяга должна быть такой, которая необходима для выполнения горизонтального полета
|
||||||||||||
|
2.c
|
1)
|
Динамические характеристики при изменении тяги
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Заход на посадку
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Изменение тяги от уровня, необходимого для захода на посадку или для горизонтального полета, до номинальной тяги или до значения тяги, необходимой для ухода на второй круг
Изменение по времени неконтролируемой свободной реакции в течение интервала времени, начинающегося как минимум с момента за 5 с до начала изменения тяги и заканчивающегося через 15 с после завершения изменения тяги
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления;
для тренажеров типа I, II, III, IV и VI испытание проводится только в штатном режиме управления
|
|
|
+/- 30 м (100 фут) по абсолютной высоте
|
||||||||||||||
|
+/- 1,5° или +/- 20% от угла тангажа
|
||||||||||||||
|
Для тренажеров типа II и IV:
|
+/- 2,2 даН (5 фунт-силы) или +/- 20% от усилия на рычаг управления по тангажу
|
ПНВ
|
ПНВ
|
|||||||||||
|
1)
|
Усилие при изменении тяги
|
|||||||||||||
|
Испытания усилий должны предусматривать создание усилий, необходимых для поддержания постоянной воздушной скорости или высоты с целью завершения процедуры изменения конфигурации
|
||||||||||||||
|
2.c
|
2)
|
Динамические характеристики при изменении положения закрылков
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет и начальная уборка закрылков, заход на посадку
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Изменение по времени неконтролируемой свободной реакции в течение интервала времени, начинающегося как минимум с момента за 5 с до начала изменения конфигурации и заканчивающегося через 15 с после завершения процедуры изменения конфигурации
|
|
|
+/- 30 м (100 футов) по абсолютной высоте
|
||||||||||||||
|
+/- 1,5° или +/- 20% от угла тангажа.
|
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления.
для тренажеров типа I, II, III, IV и VI испытание проводится только в штатном режиме управления
|
|||||||||||||
|
Испытания усилий (для тренажеров типа II или IV) должны предусматривать создание усилий, необходимых для поддержания постоянной воздушной скорости или высоты с целью завершения процедуры изменения конфигурации
|
||||||||||||||
|
Для тренажеров типа II и IV:
|
+/- 2,2 даН (5 фунт-силы) или +/- 20% от усилия на рычаг управления по тангажу
|
ПНВ
|
ПНВ
|
|||||||||||
|
2)
|
Усилие для изменения положения закрылков
|
|||||||||||||
|
2.c
|
3)
|
Динамические характеристики при изменении положения интерцепторов (аэродинамических тормозов)
|
+/- 5,56 км/ч (+/- 3 узла) от воздушной скорости
|
Крейсерский полет
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Изменение по времени неконтролируемой свободной реакции в течение интервала времени, начинающегося как минимум с момента за 5 с до начала изменения конфигурации и заканчивающегося через 15 с после завершения процедуры изменения конфигурации
|
|
|
+/- 30 м (100 футов) по абсолютной высоте
|
||||||||||||||
|
+/- 1,5° или +/- 20% от угла тангажа
|
Необходимы результаты, относящиеся как к выпуску, так и уборке механизации.
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления;
для тренажеров типа I, II, III, IV и VI испытание проводится только в штатном режиме управления
|
|||||||||||||
|
2.c
|
4)
|
Динамические характеристики при изменении положения шасси
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет (уборка) и заход на посадку (выпуск)
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Изменение по времени неконтролируемой свободной реакции в течение интервала времени, начинающегося с момента как минимум за 5 с до начала изменения конфигурации и заканчивающегося через 15 с после завершения процедуры изменения конфигурации
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления;
для тренажеров типа I, II, III, IV и VI испытание проводится только в штатном режиме управления
|
|
|
+/- 30 м (100 футов) по высоте
|
||||||||||||||
|
+/- 1,5 мили +/- 20% от угла тангажа
|
||||||||||||||
|
для тренажеров типов II и IV:
|
+/- 2,2 даН (5 фунт-силы) или +/- 20% от усилия на рычаг управления по тангажу
|
ПНВ
|
ПНВ
|
Испытания усилий (для тренажеров типа II или IV) должны предусматривать создание усилий, необходимых для поддержания постоянной воздушной скорости или высоты с целью завершения процедуры изменения конфигурации
|
||||||||||
|
усилие при изменении положения шасси
|
||||||||||||||
|
2.c
|
5)
|
Продольная балансировка
|
+/- 1° по углу руля высоты
|
Крейсерский полет, заход на посадку и посадка
|
+
|
+
|
+
|
Балансировка в установившемся режиме горизонтального полета с соответствующей тягой, требуемой для горизонтального полета. Может быть представлена серия векторов мгновенного состояния
Самолет с компьютерным управлением:
Испытание проводится в штатном или нештатном режиме управления, если это применимо;
|
||||||
|
+/- 0,5° по углу стабилизатора
|
||||||||||||||
|
+/- 1° по углу тангажа
|
||||||||||||||
|
+/- 5% от чистой тяги или от эквивалентной величины
|
||||||||||||||
|
Для тренажеров типа I, III и VI:
|
+
|
+
|
+
|
Для тренажеров типа I, III и VI возможно использование положение рычага управления по тангажу вместо угла руля высоты и положение триммера вместо угла стабилизатора
|
||||||||||
|
+/- 2° по углу руля высоты
|
||||||||||||||
|
+/- 1° по углу стабилизатора
|
||||||||||||||
|
+/- 2° по углу тангажа
|
||||||||||||||
|
+/- 5% от чистой тяги или от эквивалентной величины
|
||||||||||||||
|
Для тренажеров типа III V:
+/- 2° по углу руля высоты
+/- 1° по углу стабилизатора
+/- 2° по углу тангажа
+/- 5% от чистой тяги или от эквивалентной величины
|
ПНВ
|
ПНВ
|
||||||||||||
|
2.c
|
6)
|
Продольная устойчивость при маневрировании (усилие на ручке управления/g)
|
+/- 2,2 даН (5 фунт-силы) или 10% от усилия на рычаг управления по тангажу
|
Крейсерский полет, заход на посадку и посадка
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Возможно использование данных, описывающих непрерывное изменение по времени, или серии тестов моментального состояния
|
|
|
Альтернативный метод:
+/- 1° или +/- 10% от изменения угла руля высоты
|
Испытание проводится для углов крена примерно до 30° для конфигураций захода на посадку и посадки. Испытание проводится для углов крена примерно до 45° для конфигурации крейсерского режима
|
|||||||||||||
|
Допуск по усилиям не применим, если усилия создаются исключительно с помощью оригинального самолетного оборудования, установленного на тренажер
|
||||||||||||||
|
Альтернативный метод относится к самолетам, на которых усилие на ручке управления не зависит от перегрузки
|
||||||||||||||
|
В качестве альтернативного метода для тренажеров типа I, III и VI можно использовать положение рычага управления по тангажу вместо угла отклонения руля высоты
|
||||||||||||||
|
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления. Для устройств типа I, II, III, IV и VI испытание проводится только в штатном режиме управления
|
||||||||||||||
|
2.c
|
7)
|
Продольная статическая устойчивость
|
+/- 2,2 даН (5 фунт-силы) или 10% по усилию на рычаг управления по тангажу
|
Заход на посадку
|
ПНВ
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Необходимы данные, как минимум, для двух скоростей свыше и двух скоростей ниже скорости балансировки. Диапазон скоростей должен быть достаточным для демонстрации характеристик зависимости усилия на рычаге от скорости
|
|
|
Альтернативный метод:
+/- 1 ° или +/- 10% от изменения угла руля высоты
|
||||||||||||||
|
Может быть представлена серия векторов мгновенного состояния
|
||||||||||||||
|
Допуск по усилиям не применим, если усилия создаются исключительно с помощью оригинального самолетного оборудования, установленного на тренажер
|
||||||||||||||
|
Альтернативный метод относится к самолетам, которые не имеют характеристик устойчивости по скорости
|
||||||||||||||
|
В качестве альтернативного метода для тренажеров типа I, III и VI можно использовать положение органа управления по тангажу вместо угла отклонения руля высоты.
|
||||||||||||||
|
Самолет с компьютерным управлением: Испытание в штатном или нештатном режиме управления, если это применимо
|
||||||||||||||
|
2.c
|
8)
|
Характеристики сваливания
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости для начального бафтинга (тряски), для сигналов предупреждения о сваливании и для скоростей сваливания
|
2 участок набора высоты и заход на посадку или посадка
|
+
|
+
|
+
|
Вход в режим сваливания из полета при отсутствии крена (перегрузка 1 g) на режиме малого газа или тяге, близкой к той величине
|
||||||
|
Должны быть представлены данные изменения по времени, включая полное сваливание и начало выхода из сваливания
|
||||||||||||||
|
Сигнал предупреждения о приближении к сваливанию должен быть зарегистрирован и правильно выдаваться относительно сваливания
Авиационные тренажеры самолетов, проявляющих свойство внезапного изменения положения по тангажу или резкое уменьшение перегрузки, также должны демонстрировать эти характеристики
|
||||||||||||||
|
+/- 2° по углу крена для скоростей свыше уровня срабатывания вибросигнализатора ручки управления или уровня начального бафтинга (тряски)
|
||||||||||||||
|
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления, если это применимо; для тренажеров типа I, II, III, IV и VI испытание проводится только в штатном режиме управления, если это применимо
|
||||||||||||||
|
+/- 2° по углу атаки для порога бафтинга (тряски) по восприятию и начального бафтинга (тряски) на основе нормальной перегрузки
|
||||||||||||||
|
Приближение к сваливанию:
+/- 2° по углу тангажа;
+/- 2° по углу атаки; и
+/- 2° по углу крена
|
||||||||||||||
|
Для самолетов с обратимыми системами управления полетом:
|
||||||||||||||
|
+/- 10% или +/- 2,2 даН (5 фунт-сила) по усилию на колонку (только перед резким изменением перегрузки (g))
|
||||||||||||||
|
Для тренажеров типа I, II, III, IV и VI (маневр не должен включать в себя полное сваливание):
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости для выдачи предупреждения о сваливании
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
|||||||||
|
2.c
|
9)
|
Динамические характеристики фугоидного движения
|
+/- 10% от величины периода
|
Крейсерский полет
|
+
|
+
|
+
|
Испытание должно включать в себя три полных цикла или такое количество циклов, которое необходимо для определения интервала времени до момента достижения вдвое меньшей или вдвое большей амплитуды, в зависимости от того, какое значение будет меньше
|
||||||
|
+/- 10% от интервала времени до момента достижения вдвое меньшей или вдвое большей амплитуды или +/- 0,02 от коэффициента демпфирования
|
||||||||||||||
|
Самолет с компьютерным управлением: Испытание проводится в нештатном режиме управления
|
||||||||||||||
|
Для тренажеров типа I, II, III, IV и VI:
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
|||||||||
|
+/- 10% от величины периода с типовым демпфированием
|
||||||||||||||
|
2.c
|
10)
|
Динамические характеристики короткопериодического движения
|
+/- 1,5° по углу тангажа или
+/- 2/с по скорости тангажа
+ 0,1 g от нормального ускорения
|
Крейсерский полет
|
+
|
+
|
+
|
Самолет с компьютерным управлением: Испытание проводится в штатном и нештатном режимах управления
|
||||||
|
2.d
|
Боковое движение
|
Режим двигателя должен быть такой, который необходим для выполнения горизонтального полета
|
||||||||||||
|
2.d
|
1)
|
Минимальная эволютивная скорость в воздухе (Vmca) или при заходе на посадку (Vmcl) в соответствии с действующими требованиями летной годности, либо с характеристиками управляемости в воздухе на малой скорости с одним неработающим двигателем
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет или посадка (в зависимости от того, какой режим является наиболее критическим для данного самолета)
|
ПНВ
|
ПНВ
|
ПНВ
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
Минимальная скорость может быть определена на основе характеристики или предела характеристики управления, который не позволяет продемонстрировать достижение Vmca или Vmcl обычным образом
|
|
|
На работающем(их) двигателе(ях) должна быть установлена взлетная тяга
Возможно использование данных, описывающих изменение по времени, или данных теста моментального состояния
|
||||||||||||||
|
Для тренажеров типа I, II, III, IV и VI важно обеспечивать реальную взаимосвязь между скоростями Vmca (или Vmcl) и Vs для всех конфигураций и, в частности, для максимально критической конфигурации при отказе двигателя на режиме полной тяги
|
||||||||||||||
|
Самолет с компьютерным управлением: Испытание проводится в штатном или нештатном режиме управления, если это применимо
|
||||||||||||||
|
2.d
|
2)
|
Реакция по крену (угловая скорость)
|
+/- 2/с или +/- 10% от угловой скорости крена
|
Крейсерский полет и заход на посадку или посадка
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Испытание со штатным перемещением рычага управления по крену (примерно одна треть от максимального хода рычага управления креном).
|
|
|
Для самолетов с обратимыми системами управления полетом: +/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия на штурвал
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
|||||||
|
2.d
|
3)
|
Ступенчатый входной сигнал на рычаге управления в кабине экипажа по крену
|
+/- 2 или +/- 10% от угла крена
|
Заход на посадку или посадка
|
+
|
+
|
+
|
+
|
+
|
+
|
При нулевом угле крена необходимо ввести ступенчатый входной управляющий сигнал по крену, используя примерно одну треть от полного хода рычага управления креном. При угле крена примерно 20° - 30° следует резко вернуть ручку управления по крену в нейтральное положение и позволить свободную реакцию самолета в течение как минимум 10 с.
|
|||
|
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления;
для тренажеров типа I, III и VI испытание проводится только в штатном режиме управления
|
||||||||||||||
|
2.d
|
4)
|
Спиральная устойчивость
|
Правильное направление и +/- 2° или +/- 10% от угла крена за 20 с
|
Крейсерский полет и заход на посадку или посадка
|
+
|
+
|
+
|
Возможно использование самолетных данных, усредненных на основе результатов нескольких испытаний
|
||||||
|
В случае альтернативного испытания:
правильное направление и +/- 2° по углу отклонения элеронов
|
Испытание проводится в обоих направлениях. В качестве альтернативного испытания осуществляется демонстрация поперечного управления, необходимого для выполнения установившегося разворота с углом крена приблизительно 30°
|
|||||||||||||
|
Для тренажеров типа I, II, III, IV и VI:
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
|||||||||
|
Правильное направление +/- 3° или +/- 10% от угла крена за 20 с
|
Самолет с компьютерным управлением: Испытание проводится в нештатном режиме управления
|
|||||||||||||
|
2.d
|
5)
|
Балансировка самолета с неработающим двигателем
|
+/- 1° по углу отклонения руля направления или +/- 1° по углу отклонения триммера или эквивалентному перемещению педали руля направления
|
2-ой участок набора высоты и заход на посадку или посадка
|
+
|
+
|
+
|
+
|
+
|
+
|
Испытание должно проводиться с тем же порядком действий, которому пилот обучается для балансировки самолета в условиях отказа двигателя.
|
|||
|
Испытание на втором участке набора высоты должно проводиться при взлетной тяге. Испытание при заходе на посадку или при посадке должно проводиться при режиме тяги, требуемом для горизонтального полета.
Это испытание может проводиться в виде тестов моментального состояния.
|
||||||||||||||
|
+/- 2° по углу скольжения
|
||||||||||||||
|
Для тренажеров типа I, III и VI:
Согласование угла скольжения осуществляется только для обеспечения повторяемости и только при проведении периодических оценок
|
||||||||||||||
|
2.d
|
6)
|
Реакция на отклонение руля направления
|
+/- 2°/с или +/- 10% от скорости рыскания
|
Заход на посадку или посадка
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Испытание проводится при включенной и выключенной системе повышения устойчивости
|
|
|
или для тренажеров типа II и IV: +/- 2°/с или +/- 10% от скорости рыскания или
+/- 10% от изменения курса
|
Испытание проводится со ступенчатым входным сигналом при перемещении педали руля направления приблизительно на 25% от полного хода
|
|||||||||||||
|
Самолет с компьютерным управлением: для тренажеров типа V и VII испытание проводится в штатном и нештатном режимах управления;
для тренажеров типа I, II, III, IV и VI испытание проводится только в штатном режиме управления
|
||||||||||||||
|
2.d
|
7)
|
Колебания вызванные взаимодействием путевого и поперечного канала
|
+/- 0,5 с или +/- 10% от величины периода
|
Крейсерский полет и заход на посадку или посадка
|
+
|
+
|
+
|
Испытание проводится, как минимум, для шести периодов с отключенной системой повышения устойчивости
|
||||||
|
+/- 10% от интервала времени до момента достижения вдвое меньшей или вдвое большей амплитуды или +/- 0,02 от коэффициента демпфирования
|
Самолет с компьютерным управлением: Испытание проводится в нештатном режиме управления
|
|||||||||||||
|
+/- 1 с или +/- 20% от разности по времени между максимумами угла крена и угла скольжения
|
||||||||||||||
|
Для тренажеров типа I, III и VI:
|
+
|
+
|
+
|
|||||||||||
|
+/- 0,5 с или +/-10% от величины периода с типовым демпфированием
|
||||||||||||||
|
2.d
|
8)
|
Установившееся скольжение
|
Для заданного положения руля направления:
|
Заход на посадку или посадка
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Представляется серией векторов мгновенного состояния с использованием, по крайней мере, двух положений руля направления (в каждом направлении для винтовых самолетов), одно из которых должно быть почти максимальным разрешенным отклонением руля направления
|
|
|
+/- 2° по углу крена;
|
||||||||||||||
|
+/- 1° по углу скольжения;
|
||||||||||||||
|
+/- 2° или +/- 10% от угла отклонения элеронов; и +/- 5° или +/- 10% от угла отклонения интерцепторов или эквивалентного положения рычага управления креном, либо эквивалентного усилия на рычаг управления креном.
|
||||||||||||||
|
Для самолетов с обратимыми системами управления:
|
+
|
ПНВ
|
+
|
ПНВ
|
+
|
+
|
+
|
+
|
Для тренажеров типа I, III и VI:
Вместо угла отклонения элеронов можно использовать положение рычага управления по углу крена. Согласование угла скольжения осуществляется только для обеспечения повторяемости и только при проведении периодических оценок
|
|||||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия на штурвал
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на педаль руля направления
|
||||||||||||||
|
2.e
|
Посадки
|
|||||||||||||
|
2.e
|
1)
|
Нормальная посадка
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости.
|
Посадка
|
+
|
+
|
+
|
Испытание проводится с высоты как минимум 61 м (200 футов) над уровнем земли до момента касания ВПП носовым колесом.
|
||||||
|
+/- 1,5° по углу тангажа
|
Должны быть продемонстрированы два испытания, включая две штатных конфигурации посадочных закрылков (если это применимо), причем одна из конфигураций должна быть с почти максимальной сертифицированной посадочной массой, а вторая с небольшой или средней посадочной массой
|
|||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
+/- 3 м (10 фут) или +/- 10% от относительной высоты
|
||||||||||||||
|
Для самолетов с обратимыми системами управления полетом:
|
Самолет с компьютерным управлением: Испытание проводится в штатном и нештатном режимах управления, если это применимо
|
|||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на колонку
|
||||||||||||||
|
2.e
|
2)
|
Посадка с минимальной конфигурацией закрылков
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости.
|
Минимальная сертифицированная конфигурация посадочных закрылков
|
+
|
+
|
+
|
Испытание проводится с высоты как минимум 61 м (200 футов) над уровнем земли до момента касания ВПП носовым колесом
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
+/- 1,5° по углу атаки
|
Испытание проводится с почти максимальной сертифицированной посадочной массой
|
|||||||||||||
|
+/- 3 м (10 футов) или +/- 10% от относительной высоты
|
||||||||||||||
|
Для самолетов с обратимыми системами управления полетом:
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на колонку
|
||||||||||||||
|
2.e
|
3)
|
Посадка при боковом ветре
|
+/- 5,56 км/ч (+/-3 узла) по воздушной скорости.
|
Посадка
|
+
|
+
|
+
|
Испытание проводится с высоты, как минимум 61 м (200 футов) над уровнем земли до момента уменьшения на 50% скорости касания ВПП основным шасси
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
+/- 1,5° по углу атаки
|
Необходимы данные испытаний, включая профиль ветра, для составляющей бокового ветра, равной, как минимум, 60% от значения из данных характеристик для самолета, измеренных на высоте 10 м (33 фута) над ВПП
|
|||||||||||||
|
+/- 3 м (10 футов) или +/- 10% от высоты
|
||||||||||||||
|
+/- 2° по углу крена
|
||||||||||||||
|
+/- 2° по углу скольжения
|
||||||||||||||
|
+/- 3° по курсовому углу
|
Составляющие ветра должны представляться величинами встречного и бокового ветра относительно ВПП
|
|||||||||||||
|
Для самолетов с обратимыми системами управления:
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на колонку
|
||||||||||||||
|
+/- 1,3 даН (3 фунт-силы) или +/- 10% от усилия на штурвал
|
||||||||||||||
|
+/- 2,2 даН (5 фунт-силы) или +/- 10% от усилия на педаль руля направления
|
||||||||||||||
|
2.e
|
4)
|
Посадка с одним неработающим двигателем
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Посадка
|
+
|
+
|
+
|
Испытание проводится с высоты, как минимум 61 м (200 футов) над уровнем земли до момента уменьшения на 50% скорости касания ВПП основным шасси
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
+/- 3 м (10 футов) или +/- 10% от относительной высоты
|
||||||||||||||
|
+/- 2° по углу крена
|
||||||||||||||
|
+/- 2° по углу скольжения
|
||||||||||||||
|
+/- 3° по курсовому углу
|
||||||||||||||
|
2.e
|
5)
|
Посадка с использованием автопилота (если это применимо)
|
+/- 1,5 м (5 футов) от высоты выравнивания
|
Посадка
|
+
|
+
|
+
|
Если автопилот обеспечивает управление после посадочного пробега, то регистрируется боковое отклонение от момента касания до момента снижения на 50% скорости при касании ВПП основным шасси.
|
||||||
|
+/- 0,5 с или +/- 10% от Tf
|
||||||||||||||
|
+/- 0,7 м/с (140 фут/мин) от скорости снижения при касании ВПП
|
Следует регистрировать время включения автопилотом режима выравнивания и время касания ВПП основным шасси.
Tf - длительность выравнивания
|
|||||||||||||
|
+/- 3 м (10 футов) от бокового отклонения в процессе послепосадочного пробега
|
||||||||||||||
|
2.e
|
6)
|
Уход на второй круг с использованием автопилота и при всех работающих двигателях
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Согласно данным летно-технических характеристик самолета
|
+
|
+
|
+
|
Требуется продемонстрировать штатный уход на второй круг с использованием автопилота (если это применимо) при всех работающих двигателях со средней массой
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
2.e
|
7)
|
Уход на второй круг с одним неработающим двигателем
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости.
|
Согласно данным летно-технических характеристик самолета
|
+
|
+
|
+
|
Требуется выполнить уход на второй круг с одним неработающим двигателем, с близкой к максимальной сертифицированной посадочной массой и с неработающим критическим двигателем
Одно испытание проводится с включенным автопилотом (если это применимо) и одно испытание - без автопилота
Самолет с компьютерным управлением:
Испытание без автопилота должно проводиться в нештатном режиме управления
|
||||||
|
+/- 1,5° по углу тангажа
|
||||||||||||||
|
+/- 1,5° по углу атаки
|
||||||||||||||
|
+/- 2° по углу крена
|
||||||||||||||
|
+/- 2° по углу скольжения
|
||||||||||||||
|
2.e
|
8)
|
Путевое управление (эффективность руля направления) при использовании реверса тяги (симметричной)
|
+/- 9,26 км/ч (+/- 5 узлов) по воздушной скорости
|
Посадка
|
+
|
+
|
+
|
Задавать входные сигналы педали руля направления в обоих направлениях с использованием полного реверса тяги до достижения величины минимальной эксплуатационной скорости при полном реверсе тяги
|
||||||
|
+/- 2°/с по скорости рыскания
|
||||||||||||||
|
2.e
|
9)
|
Путевое управление (эффективность руля направления) при использовании реверса тяги (несимметричной)
|
+/- 9,26 км/ч (+/- 5 узлов) по воздушной скорости
|
Посадка
|
+
|
+
|
+
|
При максимальном реверсе тяги на работающем(их) двигателе(ях) необходимо выдерживать курс с помощью педали руля направления до тех пор, пока не будет достигнуто максимальное перемещение педали руля направления или пока не будет достигнута минимальная эксплуатационная скорость при реверсе тяги
|
||||||
|
+/- 3° по курсовому углу
|
||||||||||||||
|
2.f
|
Эффект влияния земли
|
|||||||||||||
|
2.f
|
1)
|
Испытание для демонстрации эффекта влияния земли
|
+/- 1 ° по углу отклонения руля высоты
|
Посадка
|
+
|
+
|
+
|
Для обоснования результатов представляется рациональное объяснение
|
||||||
|
+/- 0,5° по углу отклонения стабилизатора
|
Самолет с компьютерным управлением: Испытание проводится в штатном или нештатном режиме управления, если это применимо
|
|||||||||||||
|
+/- 5% от чистой тяги или от эквивалентного значения
|
||||||||||||||
|
+/- 1° по углу атаки
|
||||||||||||||
|
+/- 1,5 м (5 футов) или +/- 10% от относительной высоты
|
||||||||||||||
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
||||||||||||||
|
+/- 1° по углу тангажа
|
||||||||||||||
|
2.g
|
Сдвиг ветра
|
|||||||||||||
|
2.g
|
1)
|
Испытание для демонстрации моделей сдвига ветра
|
Определяется уполномоченным органом
|
Взлет и посадка
|
+
|
+
|
+
|
|||||||
|
2.h
|
Функции систем, предназначенные для защиты вертолета от выхода за пределы летных и маневренных ограничений (далее - функции защиты) от выхода за границы допустимых режимов выполнения полета и маневра
|
Требования пункта 2.h применимы только в отношении самолетов с компьютерным управлением. Необходимы результаты, описывающие изменение по времени реакции на входные управляющие сигналы при входе в каждую функцию защиты от выхода за границы допустимых режимов (в штатных и ухудшенных условиях управления, если соответствующие функции отличаются друг от друга). Установка тяги, которая необходима для выполнения функции защиты полетных режимов
|
||||||||||||
|
2.h
|
1)
|
Превышение скорости
|
+/- 9,26 км/ч (+/- 5 узлов) по воздушной скорости
|
Крейсерский полет
|
+
|
+
|
+
|
|||||||
|
2.h
|
2)
|
Минимальная скорость
|
+/- 5,56 км/ч (+/- 3 узла) по воздушной скорости
|
Взлет, крейсерский полет, заход на посадку или посадка
|
+
|
+
|
+
|
|||||||
|
2.h
|
3)
|
Коэффициент перегрузки
|
+/- 0,1 g по нормальному ускорению
|
Взлет, крейсерский полет
|
+
|
+
|
+
|
|||||||
|
2.h
|
4)
|
Угол тангажа
|
+/- 1,5° по углу тангажа
|
Крейсерский полет, заход на посадку
|
+
|
+
|
+
|
|||||||
|
2.h
|
5)
|
Угол крена
|
+/- 2° или +/- 10% от угла крена
|
Заход на посадку
|
+
|
+
|
+
|
|||||||
|
2.h
|
6)
|
Угол атаки
|
+/- 1,5° по углу атаки
|
2 участок взлета и заход на посадку или посадка
|
+
|
+
|
+
|
|||||||
|
ИСПЫТАНИЕ
|
ДОПУСК
|
УСЛОВИЯ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||||
|
3.
|
СИСТЕМА ПОДВИЖНОСТИ
|
|||||||||||||
|
3.a
|
Частотная характеристика
|
Как определено заявителем на проведение квалификационной оценки
|
Не применимо
|
+
|
+
|
+
|
Проводится соответствующее испытание для демонстрации требуемой частотной характеристики
|
|||||||
|
Балансировка опор
|
Не применимо
|
Не применимо
|
+
|
Не применимо
|
||||||||||
|
Как определено заявителем на проведение квалификационной оценки
|
||||||||||||||
|
3.b
|
Проверка системы подвижности при изменении знака входного сигнала на противоположный
|
Как определено заявителем на проведение квалификационной оценки
|
Не применимо
|
+
|
+
|
+
|
Проводится соответствующее испытание для демонстрации требуемой плавной работы системы при изменении входного сигнала на противоположный
|
|||||||
|
3.c
|
Акселерационные эффекты
|
|||||||||||||
|
3.d
|
Стабильность системы подвижности
|
+/- 0,05 g к фактическому линейному ускорению платформы
|
Не применимо
|
+
|
+
|
+
|
Обеспечивать, чтобы аппаратное и программное обеспечение системы подвижности (в штатном режиме эксплуатации тренажера) функционировало на уровне, установленном при первоначальной квалификационной оценке. Изменения характеристик по сравнению с исходными, могут быть легко определены на основе такой информации
|
|||||||
|
3.e
|
1)
|
Точность воспроизведения акселерационных воздействий Частотный критерий
|
Подлежит определению
|
На земле и в полете
|
+
|
+
|
До определения конкретных величин допусков, проведение оценки по данному критерию не требуется
|
|||||||
|
Требуется проведение регистрации результатов испытания
|
||||||||||||||
|
Для системы подвижности, применяемой при обучении, должны регистрироваться в сочетании модули и фазы алгоритма воспроизведения акселерационных воздействий и управления движение платформы в диапазоне частот, соответствующем характеристикам моделируемого самолета. Это испытание требуется проводить только при первоначальной квалификационной оценке авиационного тренажера
|
||||||||||||||
|
3.e
|
2)
|
Точность воспроизведения акселерационных воздействий Временной критерий
|
Подлежит определению
|
На земле и в полете
|
+
|
+
|
До определения конкретных величин допусков, проведение оценки по данному критерию не требуется
|
|||||||
|
Требуется проведение регистрации результатов испытания
|
||||||||||||||
|
3.f
|
Характерные вибрации при движении
Для характерных вибраций при движении, которые ощущаются в кабине экипажа и соответствуют типу самолета, необходимо проводить следующие испытания, а также регистрировать их результаты и составлять ЗОС
|
Не применимо
|
На земле и в полете
|
Зарегистрированные результаты испытаний характерных видов бафтинга (тряски) должны позволять проводить сравнение зависимости относительной амплитуды от частоты
|
||||||||||
|
3.f.
|
1)
|
Эффекты тяги при действии системы тормозов
|
Результаты испытаний должны демонстрировать общий ход и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц относительно данных самолета
|
На земле
|
+
|
+
|
+
|
Испытание должно проводиться при максимально возможной тяге и действии системы тормозов
|
||||||
|
3.f.
|
2)
|
Тряска при выпущенных шасси
|
Результаты испытаний должны демонстрировать общий ход и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц относительно данных самолета
|
В полете
|
+
|
+
|
+
|
Испытание должно проводиться при нормальной эксплуатационной скорости, а не на предельно допустимой скорости полета с выпущенными шасси
|
||||||
|
3.f.
|
3)
|
Тряска при выпущенных закрылках
|
Результаты испытаний должны демонстрировать общий ход и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц относительно данных самолета
|
В полете
|
+
|
+
|
+
|
Испытание должно проводиться при нормальной эксплуатационной скорости, а не на предельно допустимой скорости полета с выпущенными закрылками
|
||||||
|
3.f.
|
4)
|
Тряска при выпущенных аэродинамических тормозах
|
Результаты испытаний должны демонстрировать общий ход вид и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц относительно данных самолета
|
В полете
|
+
|
+
|
+
|
Испытание должно проводиться при скорости, типичной для характерной тряски
|
||||||
|
3.f.
|
5)
|
Тряска при приближении к сваливанию
|
Результаты испытаний должны демонстрировать общий ход и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц данных самолета
|
В полете
|
+
|
+
|
+
|
Испытание должно проводиться в режиме приближения к сваливанию. Характеристики после сваливания не требуются
|
||||||
|
3.f.
|
6)
|
Бафтинг (тряска) на высокой скорости или больших числах М
|
Результаты испытаний должны демонстрировать общий ход и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц относительно данных самолета
|
В полете
|
+
|
+
|
+
|
Режим испытаний должен соответствовать явлению тряски при выполнении маневра на высокой скорости, форсированного разворота или бафтинга (тряски) на больших числах М
|
||||||
|
3.f.
|
7)
|
Вибрации в полете
|
Результаты испытаний должны демонстрировать общий ход и тенденции изменений данных самолета минимум с 3 преобладающими пиками частот, представленных в диапазоне +/- 2 Гц относительно данных самолета
|
Полет (конфигурация с убранными шасси и закрылками)
|
+
|
+
|
+
|
Испытание должно проводиться таким образом, чтобы его результаты были характерны для вибраций винтовых самолетов в полете
|
||||||
|
ИСПЫТАНИЕ
|
ДОПУСК
|
УСЛОВИЯ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||||
|
4.
|
СИСТЕМА ВИЗУАЛИЗАЦИИ
|
|||||||||||||
|
4.a
|
Качество визуальной картины
|
|||||||||||||
|
4.a.1
|
Непрерывная коллимированная зона обзора из кабины пилотов
|
Коллимированный дисплей системы визуализации в кабине пилотов, обеспечивающий каждому пилоту непрерывную зону обзора с углом минимум 200° по горизонтали и минимум 40° по вертикали
|
Не применимо
|
+
|
+
|
При испытаниях углы зоны обзора должны измеряться с использованием шаблона, представляющего собой матрицу из черных и белых квадратов размером 5°, которые заполняют всю визуальную картину (все каналы)
|
||||||||
|
Непрерывная коллимированная зона обзора из кабины пилотов
|
Коллимированный дисплей системы визуализации в кабине пилотов, обеспечивающий каждому пилоту непрерывную зону обзора с углом минимум 180° по горизонтали и минимум 40° по вертикали
|
Не применимо
|
+
|
Установленная настройка должна подтверждаться в ЗОС
|
||||||||||
|
Непрерывная зона обзора из кабины пилотов
|
Дисплей системы визуализации в кабине пилотов, обеспечивающий каждому пилоту непрерывную зону обзора с углом минимум 200° по горизонтали и минимум 40° по вертикали
|
Не применимо
|
+
|
+
|
+
|
При испытаниях углы зоны обзора должны измеряться с использованием шаблона, представляющего собой матрицу из черных и белых квадратов размером 5°, которые заполняют всю визуальную картину (все каналы)
|
||||||||
|
Установленная настройка должна подтверждаться в ЗОС
|
||||||||||||||
|
4.a.1
|
Зона обзора дисплея
|
Дисплей системы визуализации в кабине экипажа, обеспечивающий одновременно каждому пилоту зону обзора с углом минимум 45° по горизонтали и минимум 30° по вертикали, если эти параметры не ограничены типом самолета
|
Не применимо
|
+
|
+
|
+
|
Минимальное расстояние от положения глаз пилота до поверхности дисплея должно быть не меньше расстояния до любого прибора на передней панели
|
|||||||
|
Зона обзора с углом 30° по вертикали может быть недостаточна для соответствия требованиям в отношении видимого участка земли (если требуется)
|
||||||||||||||
|
Это должно учитываться при расчете поля обзора
|
||||||||||||||
|
4.a.2.a.1
|
Геометрия системы. Положение изображения
|
Для каждого положения глаз пилотов центр изображения должен находиться между 0° и 2° в горизонтальной плоскости и в пределах +/- 0,25° по вертикали
Разница между левым и правым горизонтальными углами не должна превышать 1°
|
Не применимо
|
+
|
+
|
Положение изображения следует проверять относительно осевой линии тренажера.
|
||||||||
|
Если в центр вертикального дисплея внесена расчетная поправка, это должно быть указано
|
||||||||||||||
|
4.a.2.a.2
|
Геометрия системы.
Абсолютная геометрия
|
В пределах центрального участка 200° x 40° все точки на матрице с шагом 5° должны находиться в пределах +/- 3° расчетного положения, измеренного из точки глаз каждого пилота
|
Не применимо
|
+
|
+
|
Для систем с параметрами углов обзора более 200° x 40°, геометрия за пределами центральной зоны не должна иметь никаких отвлекающих неоднородностей
|
||||||||
|
4.a.2.a.3
|
Геометрия системы.
Относительная геометрия
|
Измерения относительных положений точек следует проводить через каждые 5°.
|
Не применимо
|
+
|
+
|
|||||||||
|
В зоне от -10° до самой нижней видимой точки при азимуте 15° ближе к продольной оси 0°, 30°, 60° и 90° дальше от продольной оси для каждого положения пилота следует проводить вертикальные измерения каждые 1° до края видимого изображения
|
||||||||||||||
|
Геометрия системы. Относительная геометрия
|
Измерения относительных положений точек следует проводить через каждые 5°.
|
+
|
||||||||||||
|
Относительное положение от одной точки до другой не должно превышать: 0,2°/градус
|
||||||||||||||
|
4.a.2.b
|
Геометрия изображения не должна иметь отвлекающих внимание неоднородностей
|
+
|
+
|
+
|
+
|
+
|
||||||||
|
4.a.3
|
Разрешающая способность (обнаружение объектов)
|
Не более 2 угловых минут
|
Не применимо
|
+
|
+
|
+
|
Разрешающая способность демонстрируется испытанием объектов, которые занимают требуемый визуальный угол в каждом визуальном канале, используемом в картине, из точек глаз пилотов
|
|||||||
|
Объект, противолежащий глазу пилота, должен соответствовать 2 угловым минутам
|
||||||||||||||
|
Для испытания в горизонтальной плоскости это можно продемонстрировать с использованием разметки входной кромки ВПП
|
||||||||||||||
|
Следует также продемонстрировать такое соответствие и для испытания в вертикальной плоскости
|
||||||||||||||
|
В ЗОС противолежащие углы должны подтверждаться расчетами
|
||||||||||||||
|
4.a.3
|
Разрешающая способность (обнаружение объектов)
|
Не более 4 угловых минут
|
Не применимо
|
+
|
+
|
+
|
Разрешение демонстрируется испытанием объектов, которые занимают требуемый визуальный угол в каждом визуальном канале, используемом в картине, из точек глаз пилотов
|
|||||||
|
Объект, противолежащий глазу пилота, должен соответствовать 4 угловым минутам
|
||||||||||||||
|
Для горизонтального испытания это можно продемонстрировать с использованием разметки входной кромки ВПП
|
||||||||||||||
|
Следует продемонстрировать такое соответствие и для испытания в вертикальной плоскости В ЗОС противолежащие углы должны подтверждаться расчетами
|
||||||||||||||
|
4.a.4
|
Размер точечного источника света
|
Не более 5 угловых минут
|
Не применимо
|
+
|
+
|
+
|
Размер точечного источника света должен измеряться с помощью тестового шаблона, состоящего из расположенного в центре одного ряда световых точек белого цвета, отображаемых горизонтальной и вертикальной строками
|
|||||||
|
Должна быть предусмотрена возможность перемещения световых точек относительно точки глаз по всем осям
В точке, в которой модуляция света в каждом визуальном канале становится заметной, следует произвести расчет для определения интервалов между световыми точками
|
||||||||||||||
|
Требуется ЗОС для указания метода испытаний и расчета
|
||||||||||||||
|
Размер точечного источника света
|
Не более 8 угловых минут
|
Не применимо
|
+
|
+
|
+
|
Размер точечного источника света должен измеряться с помощью тестового шаблона, состоящего из расположенного в центре одного ряда световых точек белого цвета, отображаемого горизонтальной и вертикальной строками
|
||||||||
|
Должна быть предусмотрена возможность перемещения световых точек относительно точки глаз по всем осям.
В точке, в которой модуляция света в каждом визуальном канале становится заметной, следует произвести расчет для определения интервалов между световыми точками
|
||||||||||||||
|
Требуется ЗОС для указания метода испытаний и расчета
|
||||||||||||||
|
4.a.5
|
Коэффициент контрастности растровой поверхности
|
Не менее чем 5:1.
|
Не применимо
|
+
|
+
|
+
|
+
|
+
|
+
|
Коэффициент контрастности поверхности следует измерять с помощью растрового тестового шаблона, заполняющего все визуальное изображение (все каналы)
|
||||
|
Тестовый шаблон должен состоять из квадратов черного и белого цвета размерами 5° с белым квадратом в центре каждого канала
|
||||||||||||||
|
Измерения следует проводить на центральном белом квадрате каждого канала, используя апертурный фотометр с шагом 1°. Величина минимальной яркости должна составлять 7 кд/м2 (2 фут-ламберт). Измеряются любые соседние темные квадраты
|
||||||||||||||
|
При тестировании коэффициента контрастности уровни общего освещения задней части кабины и кабины экипажа должны возможно низкими
|
||||||||||||||
|
Измерения следует проводить в центре квадратов, чтобы не допустить проникновения света в измерительный прибор
|
||||||||||||||
|
4.a.6
|
Коэффициент контрастности точечного источника света
|
Не менее чем 25:1.
|
Не применимо
|
+
|
+
|
+
|
Коэффициент контрастности точечного источника света следует измерять с помощью тестового шаблона, показывающего область более 1° площади, заполненной белыми точечными источниками света, и сравнивать с соседним фоном
|
|||||||
|
Коэффициент контрастности точечного источника света
|
Не менее чем 10:1.
|
Не применимо
|
+
|
+
|
+
|
|||||||||
|
Модуляция точечных источников света должна быть заметной на каллиграфических системах и не заметной на растровых системах
|
||||||||||||||
|
При измерении яркости фона яркий квадрат должен находиться вне поля обзора фотометра
|
||||||||||||||
|
При тестировании коэффициента контрастности уровни общего освещения задней части кабины и кабины экипажа должны быть возможно низкими
|
||||||||||||||
|
4.a.7
|
Яркость точечного источника света
|
Не менее 20 кд/м2 (8,8 фут-ламберт)
|
Не применимо
|
+
|
+
|
+
|
+
|
+
|
+
|
Точечные источники света должны воспроизводиться в виде матрицы, образующей квадрат
|
||||
|
PPL
|
||||||||||||||
|
CPL
|
В каллиграфических системах точечные источники света должны лишь сливаться.
На растровых системах точечные источники света должны перекрываться таким образом, чтобы квадрат был сплошным (отдельные точечные источники света не будут видны)
|
|||||||||||||
|
4.a.8
|
Яркость поверхности
|
Не менее 20 кд/м2
(5,8 фут-ламберт) на дисплее
|
Не применимо
|
+
|
+
|
+
|
Яркость поверхности следует измерять на белом растре, используя апертурный фотометр
|
|||||||
|
Точечные источники света не применяются
|
||||||||||||||
|
Допускается использование каллиграфических возможностей для усиления яркости растрового изображения
|
||||||||||||||
|
Яркость поверхности
|
Не менее 14 кд/м2
(4,1 фут-ламберт) на дисплее
|
Не применимо
|
+
PPL
|
+
|
+
|
Яркость поверхности следует измерять на белом растре, используя апертурный фотометр
|
||||||||
|
CPL
|
Точечные источники света не применяются
|
|||||||||||||
|
Допускается использование каллиграфических возможностей для усиления яркости растрового изображения
|
||||||||||||||
|
4.a.9
|
Уровень черного и последовательная контрастность
|
Интенсивность черного:
|
Не применимо
|
+
|
+
|
+
|
Если это испытание не проводится, то следует представлять ЗОС с указанием причин
|
|||||||
|
яркость фона - яркость черного многоугольника < 0,015 кд/м2 (0,004 фут-ламберт)
|
||||||||||||||
|
Последовательная контрастность:
|
||||||||||||||
|
максимальная яркость - яркость черного многоугольника > 2000:1
|
||||||||||||||
|
4.a.10
|
Размытость движения
|
При вращении шаблона относительно точки глаза со скоростью 10°/с, минимальный различимый зазор должен составлять 4 угловые минуты или меньше
|
Не применимо
|
+
|
+
|
+
|
Если испытание не проводится, следует представлять ЗОС с указанием причин
|
|||||||
|
4.a.11
|
Спекл тест
|
Контрастность спекла должна быть менее 10%.
|
Не применимо
|
+
|
+
|
+
|
Требуется ЗОС с описанием метода испытаний
Обычно это испытание требуется проводить только для лазерных проекторов
Если испытание не проводится, следует представлять ЗОС с указанием причин
|
|||||||
|
4.b
|
Индикация на лобовом стекле
|
|||||||||||||
|
4.b.1
|
Статическое выравнивание
|
Статическое выравнивание с представленным изображением.
|
Не применимо
|
+
|
+
|
+
|
Требование к выравниванию относится к любой используемой системе ИЛС или к обоим одновременно, если при обучении пилотов они используются одновременно
|
|||||||
|
Оптическая ось ИЛС должна выравниваться относительно центра сферического шаблона представленного изображения
|
||||||||||||||
|
Допуск +/- 6 угловых минут
|
Не применимо
|
+
|
+
|
Требование к выравниванию относится только к пилоту, выполняющему полет
|
||||||||||
|
4.b.2
|
Дисплей параметров систем
|
Должно демонстрироваться функционирование в полном объеме на всех режимах полета.
|
+
|
+
|
+
|
+
|
+
|
Следует представлять отчет о возможностях систем и продемонстрированных возможностях
|
||||||
|
4.b.3
|
Положение индикатора ИЛС относительно индикатора углового пространственного положения (тангаж и крен по горизонту)
|
Тангаж и крен согласовываются с показаниями приборов самолета
|
В полете
|
+
|
+
|
+
|
+
|
+
|
Для тренажеров типа III и V:
Требование по выравниванию относится только к пилоту, выполняющему полет
|
|||||
|
4.c
|
Бортовая система EFVS
|
|||||||||||||
|
4.c.1
|
Регистрационное испытание
|
Выравнивание изображения на дисплее EFVS и изображения внекабинной обстановки должно воспроизводить выравнивание, типичное для типа самолета и системы
|
Точка взлета и при заходе на посадку на высоте 200 футов
|
+
|
+
|
+
|
Следует учитывать эффекты допусков на выравнивание, указанные в пункте 4.b.1
|
|||||||
|
+
|
+
|
Требование по выравниванию относится только к пилоту, выполняющему полет.
|
||||||||||||
|
Следует учитывать эффекты допусков на выравнивание, указанные в пункте 4.b.1
|
||||||||||||||
|
4.c.2
|
Дальность видимости на ВПП (далее - RVR) и калибровка видимости
|
Изображение EFVS представляет картину на высоте 350 м (1200 футов) и RVR - 1609 м (1 статутная миля), включая соответствующую интенсивность света.
|
В полете
|
+
|
+
|
+
|
+
|
+
|
Картина в инфракрасном диапазоне, характерная для высоты 350 м (1200 футов) и RVR - 1609 м (1 статутная миля)
|
|||||
|
Визуальная картина может быть убрана, если ее наличие не предусмотрено программой подготовки
|
||||||||||||||
|
4.c.3
|
Тепловой переход
|
Демонстрируются эффекты теплового изменения во время перехода от дня к ночи
|
День и ночь
|
+
|
+
|
+
|
+
|
+
|
Картина должна правильно отображать характеристики теплового изменения во время перехода от дня к ночи
|
|||||
|
4.d
|
Видимый участок земли
|
|||||||||||||
|
4.d.1
|
VGS
|
Ближний конец: должно быть видимо правильное количество огней подхода в расчетном VGS.
|
Балансировка в посадочной конфигурации на высоте колес 30 м (100 футов) над зоной приземления ВПП на глиссаде при установке RVR 300 м (1000 футов) или 350 м (1200 футов)
|
+
|
+
|
+
|
+
|
+
|
Это испытание предназначено для оценки факторов, влияющих на точность визуальной картины, воспроизводимой для пилота на высоте принятия решения при заходе на посадку по приборам.
Эти факторы включают:
|
|||||
|
Дальний конец: +/- 20% от расчетного VGS.
|
1)
|
RVR;
|
||||||||||||
|
2)
|
Точность моделирования наклона глиссады и курсового посадочного маяка (положение и наклон) при выполнении посадки по приборам;
|
|||||||||||||
|
Должны быть видны те входные огни ВПП, которые должны быть видны согласно расчетам
|
||||||||||||||
|
3)
|
Для данной массы, конфигурации и скорости, характерных для точки в пределах области эксплуатационных режимов нормального захода на посадку и посадки
|
|||||||||||||
|
4)
|
Радиовысотомер. Если в качестве базовой модели используется типовой самолет, идеальным считается типовой угол отсечки 15°
|
|||||||||||||
|
Если используется неоднородный туман, то в расчет видимости наклонной дальности, используемой для вычисления параметров VGS, включается вертикальное изменение горизонтальной видимости и его описание
|
||||||||||||||
|
4.e
|
Производительность системы визуализации
|
|||||||||||||
|
4.e.1
|
Производительность системы.
Дневное время
|
Не менее чем 10000 видимых текстурированных поверхностей, 6000 точечных источников света, 16 движущихся объектов
|
Не применимо
|
+
PPL
|
+
|
+
|
+
|
+
|
+
|
Демонстрируется путем использования визуальной картины, передаваемой теми же режимами формирования изображений, которые используются для создания визуальных картин при обучении пилотов
|
||||
|
CPL
|
||||||||||||||
|
Необходимые поверхности, точечные источники света и движущиеся объекты должны воспроизводиться одновременно
|
||||||||||||||
|
4.e.2
|
Производительность системы.
Сумерки и ночь
|
Не менее чем 10000 видимых текстурированных поверхностей, 15000 точечных источников света, 16 движущихся объектов
|
Неприменимо
|
+
PPL
|
+
|
+
|
+
|
+
|
+
|
Демонстрируется путем использования визуальной картины, передаваемой теми же режимами формирования изображений, которые используются для создания визуальных картин при обучении пилотов. Необходимые поверхности, точечные источники света и движущиеся объекты должны воспроизводиться одновременно
|
||||
|
CPL
|
||||||||||||||
|
4.e.3
|
Производительность системы.
Системы визуализации ограниченного поля обзора
|
Не менее чем 3500 видимых текстурированных поверхностей, 5000 точечных источников света,
16 движущихся объектов
|
Не применимо
|
+
MPL1
|
+
|
+
|
Демонстрируется путем использования визуальной картины, передаваемой теми же режимами формирования изображений, которые используются для создания визуальных картин при обучении пилотов. Необходимые поверхности, точечные источники света и движущиеся объекты должны воспроизводиться одновременно. Указанная производительность должна обеспечивать воспроизведение условий в любое время дня
Относится только к тренажерам типа I при использовании для обучения по MPL1 и типа тренажера II при использовании для обучения по IR, оба варианта применения допускают использование системы визуализации с ограниченной зоной обзора.
|
|||||||
|
5
|
СИСТЕМА ИМИТАЦИИ АКУСТИЧЕСКИХ ЭФФЕКТОВ
|
|||||||||||||
|
5.a
|
Основные требования
|
Оборудование для моделирования шума в тренажерах самолетов типов D, VII, VI и V должно иметь возможность выравнивания частотной характеристики акустической системы с соответствующими допусками. Усилители мощности акустической системы должны обеспечивать пик-фактор не менее 12 дБ при воспроизведении звуков с наибольшими звуковыми давлениями.
Все измерения звукового давления на соответствие данным проверочной контрольной библиотеки для типов тренажера IV - VII и D в данном разделе должны проводиться в третьоктавных полосах частот в диапазоне от 40 до 10000 Гц. Утвержденный набор данных и результаты испытаний тренажера, должны готовиться с использованием методов анализа сопоставимых данных
|
||||||||||||
|
Измерения для типов тренажеров I, II и III в данном разделе могут производиться по уровню звука A
|
||||||||||||||
|
5.a
|
Самолеты с турбореактивными или турбовентиляторными двигателями
|
Продолжительность измерений звукового давления в контрольных точках, соответствующих утвержденному набору данных, должно быть не менее 120 с для стационарных режимов полета
|
||||||||||||
|
5.a
|
1)
|
Готовность к запуску двигателя
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим перед запуском двигателя
|
|||||||
|
В соответствующем случае должна быть запущена ВСУ
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
Обучение должно производиться с применением авиагарнитур
|
|||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
+
|
||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц. Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
|||||||||||||
|
5.a
|
2)
|
Работа всех двигателей на режиме малого газа
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим, предшествующий взлету
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.a
|
3)
|
Работа всех двигателей на максимально допустимой тяге с задействованными тормозами
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим, предшествующий взлету
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.a
|
4)
|
Набор высоты
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
Набор высоты на маршруте
|
+
|
+
|
Средняя высота
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
|
+
|
|||||||||||||
|
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.a
|
5)
|
Крейсерский полет
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
Крейсерский полет
|
+
|
+
|
Нормальная крейсерская конфигурация.
|
|||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.a
|
6)
|
Выпущен аэродинамический тормоз (интерцепторы) (в соответствующих случаях)
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
Крейсерский полет
|
+
|
+
|
Нормальное и постоянное отклонение аэродинамического тормоза для снижения при постоянной воздушной скорости и тяге
|
|||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.a
|
7)
|
Начальный этап захода на посадку
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Заход на посадку
|
+
|
+
|
Постоянная воздушная скорость, шасси убрано, закрылки/предкрылки в соответствующем положении
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
+
|
||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
|||||||||||||
|
5.a
|
8)
|
Конечный этап захода на посадку
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Посадка
|
+
|
+
|
Постоянная воздушная скорость, шасси выпущено, посадочная конфигурация закрылков
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур.
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
+
|
||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
|||||||||||||
|
ИСПЫТАНИЕ
|
ДОПУСК
|
УСЛОВИЯ ПОЛЕТА
|
Тип тренажера
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
|||||||
|
5.b
|
Винтовые самолеты
|
Продолжительность измерений звукового давления в контрольных точках, соответствующих утвержденному набору данных, должно быть не менее 180 с для стационарных режимов полета
|
||||||||||||
|
5.b
|
1)
|
Готовность к запуску двигателей
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим перед запуском двигателей
|
|||||||
|
В соответствующем случае должна быть включена ВСУ
|
||||||||||||||
|
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
|||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
2)
|
Все воздушные винты во флюгерном положении, если это применимо
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в октавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим перед взлетом
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
3)
|
Режим земного малого газа или его эквивалент
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим перед взлетом
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в треть октавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
4)
|
Режим полетного малого газа или его эквивалент
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим перед взлетом
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
5)
|
Все двигатели на максимально допустимой тяге с задействованными тормозами
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
На земле
|
+
|
+
|
Нормальный режим перед взлетом
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
6)
|
Набор высоты
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в октавных полосах частот 200 - 10000 Гц
|
Набор высоты при выполнении полета по маршруту
|
+
|
+
|
Средняя высота.
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой октавной полосе частот
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в треть октавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
7)
|
Крейсерский полет
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот.
|
Крейсерский полет
|
+
|
+
|
Нормальная конфигурация крейсерского полета
|
|||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
8)
|
Начальный этап захода на посадки
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
Заход на посадку
|
+
|
+
|
Постоянная воздушная скорость, шасси убраны, закрылки выпущены в соответствующее положение, число оборотов в минуту (RPM) такое, как указано в руководстве по эксплуатации Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация) на фоне соответствующего основного режима полета и шума окружающей среды
|
|||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в октавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой октавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.b
|
9)
|
Конечный этап захода на посадку
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в треть октавных полосах частот 200 - 10000 Гц
|
Посадка
|
+
|
+
|
Постоянная воздушная скорость, шасси выпущены, закрылки в соответствующем посадочной конфигурации положении, число оборотов в минуту (RPM) такое, как указано в руководстве по эксплуатации
|
|||||||
|
Соответствие по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета (разбег по ВПП, уборка и выпуск шасси, закрылки, механизация и др.) на фоне соответствующего основного режима полета и шума окружающей среды
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в треть октавных полосах частот 200 - 10000 Гц
|
+
|
+
|
||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
+
|
|||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
5.c
|
Особые случаи
|
|||||||||||||
|
5.c.1
|
Особые случаи продолжительностью более 300 с
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 1.5 дБ в октавных полосах частот 200 - 10000 Гц
|
+
|
+
|
Это особые случаи устойчивого состояния, имеющие особое значение для пилота, которые важно учитывать при его обучении, или характерные для конкретного типа или модели самолета
|
|||||||||
|
Обучение должно производиться с применением авиагарнитур
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой октавной полосе частот
|
||||||||||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
|
||||||||||||||
|
Периодическая оценка: различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
||||||||||||||
|
Оценка инструментальными методами не проводится. Соответствие устанавливается по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета в особых случаях
|
+
|
+
|
+
|
|||||||||||
|
5.d.
|
Фоновый шум
|
|||||||||||||
|
5.d.1
|
Фоновый шум при выключенном оборудовании тренажера (фон 1 на схеме 1) (проникающий шум внешних источников из помещения, где установлен тренажер)
|
Первоначальная оценка: уровни фонового шума не должны уровней спектра фон 1, представленных на схеме 1 после таблицы.
Периодическая оценка:
Не более +/- 1 дБ в любой третьоктавной полосе по сравнению с первоначальной оценкой
|
+
|
+
|
+
|
+
|
Результаты измерения фонового шума при первоначальной оценке должны включаться в акт технической оценки тренажера и утверждаться уполномоченным органом
|
|||||||
|
Измерения уровней звукового давления должны проводится шумомером 1 класса точности с анализатором спектра, соответствующего требованиям 1 класса точности
|
||||||||||||||
|
Измерения следует проводить в контрольных точках, соответствующих ПИД
|
||||||||||||||
|
Продолжительность измерений не менее 180 с
|
||||||||||||||
|
5.d.2
|
Фоновый шум при включенном оборудовании тренажера (фон 2 на схеме 1) (проникающий шум внешних источников из помещения, где установлен тренажер и оборудования тренажера без запуска программы обучения)
|
Первоначальная оценка: уровни фонового шума не должны превышать уровень спектра фон 2, представленных на схеме 1. Периодическая оценка:
Не более +/- 1 дБ в любой третьоктавной полосе по сравнению с первоначальной оценкой
|
+
|
|||||||||||
|
6
|
ИНТЕГРАЦИЯ СИСТЕМ
|
|||||||||||||
|
6.a.
|
Время реакции системы
|
|||||||||||||
|
1)
|
Транспортная задержка
|
100 мс или менее после перемещения рычага управления
|
Тангаж, крен и рыскание
|
+
|
+
|
+
|
Для каждой оси необходимо проводить одно отдельное испытание
|
|||||||
|
120 мс или менее после перемещения рычага управления
|
Если установлена система EFVS, то реакция EFVS должна проявляться в диапазоне +/- 30 мс от реакции системы визуализации, но не ранее реакции системы подвижности
|
|||||||||||||
|
200 мс или менее после перемещения рычага управления
|
+
|
+
|
+
|
+
|
+
|
|||||||||
|
Время вносимого тренажером дополнительного запаздывания, которое складывается со временем реакции воздушного судна (далее - время запаздывания), вносимое электронными элементами системы EFVS самолета, следует прибавлять к 30 мс допуска перед сравнением с точкой отсчета для системы визуализации.
|
||||||||||||||
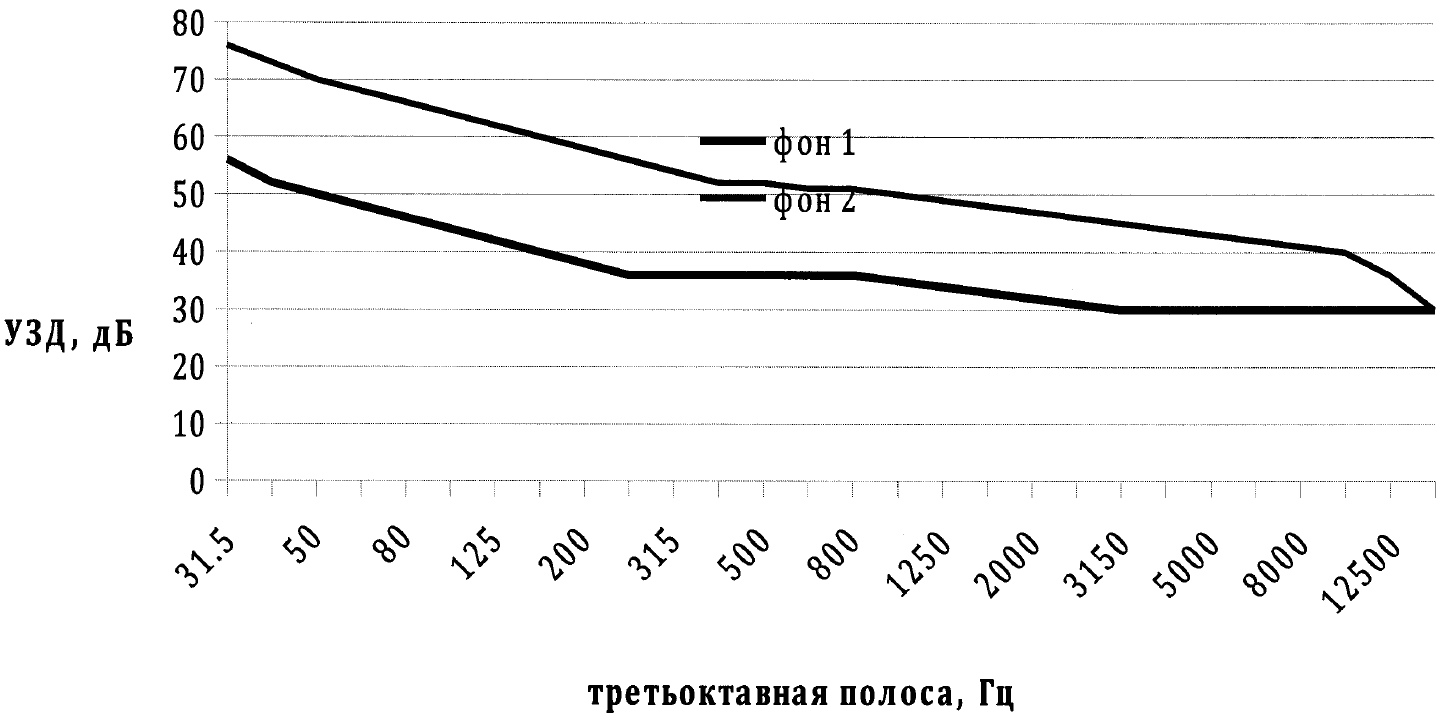
Схема 1. Приемлемость уровней фонового шума определяется разницей уровней звукового давления (УЗД) этого шума и шума в кабине самолета в основных режимах полета, она должна быть не менее 6 дБ в каждой третьоктавной полосе частот моделируемого диапазона
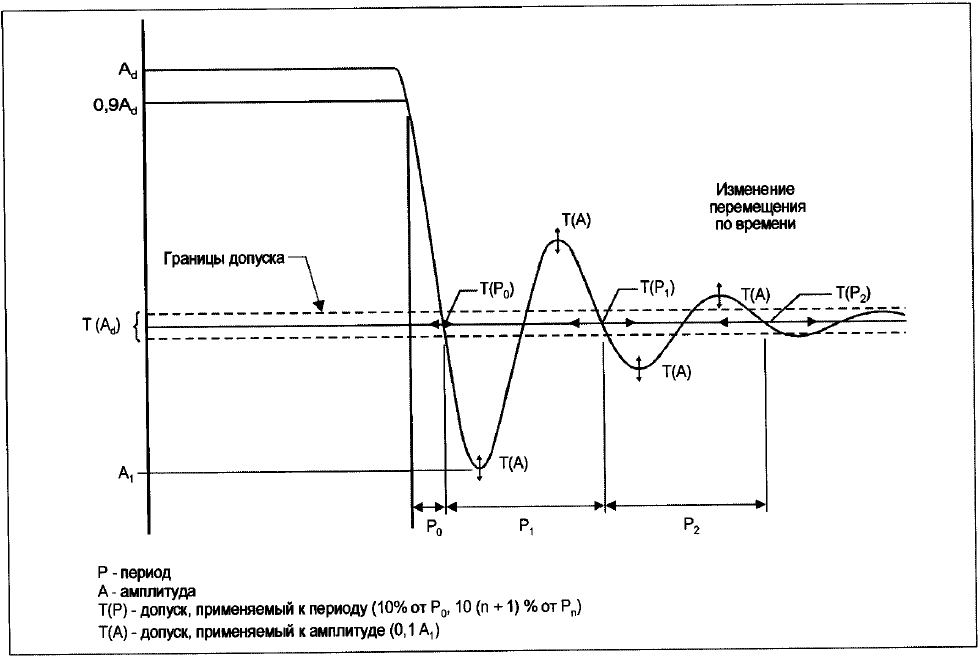
Схема 2. Характеристика переходного процесса
с недостаточным демпфированием
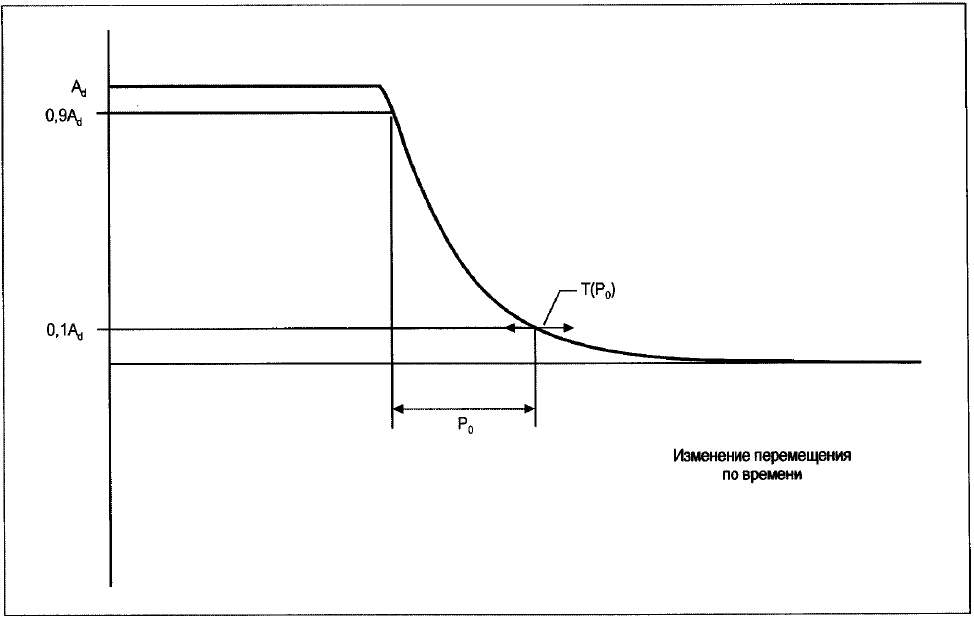
Схема 3. Характеристика переходного процесса
с критическим демпфированием
Таблица C1
|
Номер
|
Функциональные и экспертные испытания
|
Тип
|
|||||||
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
D
|
||
|
1
|
Подготовка к полету
|
||||||||
|
1.a
|
Предполетная подготовка. Проверить работы всех переключателей, индикаторов, систем и оборудования на рабочих местах всех членов экипажа и инструкторов и определить, что:
|
||||||||
|
1.a.1
|
конструкция и функции кабины летного экипажа идентичны имитируемому самолету
|
+
|
+
|
+
|
|||||
|
1.a.2
|
конструкция и функции кабины летного экипажа характерны для имитируемого класса самолетов
|
+
|
+
|
+
|
|||||
|
1.a.3
|
конструкция и функции кабины летного экипажа подобные тем, что устанавливаются на данном классе самолетов, и являются узнаваемыми.
|
+
|
+
|
||||||
|
2
|
Операции на земле (предполетные)
|
||||||||
|
2.a
|
Запуск двигателя
|
||||||||
|
2.a.1
|
Нормальный запуск
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
2.a.2
|
Альтернативные процедуры запуска
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
2.a.3
|
Запуск и останов двигателя, не относящиеся к случаям нормального запуска двигателя на различных этапах полета.
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
2.b
|
Руление
|
||||||||
|
2.b.1
|
Буксировка хвостом вперед, самостоятельное движение самолета с помощью двигателей хвостом вперед
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
2.b.2
|
Приемистость двигателя, переходные процессы по тяге
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
2.b.3
|
Усилия трения на рычагах управления двигателем
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
2.b.4
|
Управляемость при рулении
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
2.b.5
|
Скольжение носового колеса
|
+
|
+
|
+
|
|||||
|
2.b.6
|
Средства руления
|
+
|
+
|
+
|
|||||
|
2.b.7
|
Низкая видимость на различных этапах полета (разбег, взлет, набор высоты снижение, заход на посадку, посадка, пробег после посадки) и руления
|
+
|
+
|
+
|
|||||
|
2.c
|
Работа тормозной системы:
|
||||||||
|
2.c.1
|
Работа тормозов в нормальном, автоматическом и в аварийном режимах
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
2.c.2
|
Снижение эффективности основной и резервной тормозной системы
|
+
|
+
|
+
|
+
|
||||
|
3
|
Нормальный взлет
|
||||||||
|
Из приведенного ниже перечня должны быть выбраны только те испытания режимов взлета, которые относятся к моделируемому типу или классу самолета, и эти испытания должны проводиться с учетом ограничений по скорости ветра, сдвигу ветра и соответствующих отказов систем
|
|||||||||
|
3.a
|
Нормальный взлет
|
||||||||
|
3.a.1
|
Взаимосвязь параметров самолета и двигателя, включая опробование двигателя
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
3.a.2
|
Управление носовым колесом и рулем направления
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
3.a.3
|
Боковой ветер (до максимально допустимого)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
3.a.4
|
Особые характеристики:
|
+
|
|||||||
|
3.a.4.a
|
Сниженная скорость V1.
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.a.4.b
|
Максимальное снижение числа оборотов двигателя
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.a.4.c
|
ВПП с грунтовым покрытием
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.a.4.d
|
Короткая ВПП (для самолетов укороченного взлета и посадки)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.a.4.e
|
Препятствия (характеристики при взлете над видимым препятствием)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.a.5
|
Взлет в условиях ограниченной видимости
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
3.a.6
|
Работа шасси, закрылков и средств механизации передней кромки крыла
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
3.a.7
|
Выполнение взлетов с загрязненной ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.b
|
Порядок действий во внештатных и аварийных ситуациях
|
||||||||
|
3.b.1
|
Прерванный взлет
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
3.b.2
|
Порядок действий при прерванном взлете в особых случаях (сниженная V1, максимальное снижение тяги, грунтовая ВПП, короткая ВПП/короткий взлет)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.b.3
|
Прерванный взлет с загрязненной ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.b.4
|
Продолженный взлет при отказе наиболее критического двигателя в наиболее критической точке
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
3.b.5
|
Отказы системы управления, режимы реконфигурации, переход на ручное управление и соответствующее управление
|
+
|
+
|
+
|
|||||
|
3.b.6
|
Прочие
|
+
|
|||||||
|
Характеристики ускорения (движение)
|
+
|
||||||||
|
Характеристики ускорения (не связанные с движением)
|
+
|
||||||||
|
4
|
Набор высоты
|
||||||||
|
4.a
|
Нормальный
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
4.b
|
С одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
4.c
|
Набор высоты в конфигурации для захода на посадку в условиях обледенения (для самолетов с сигнализацией об обледенении)
|
+
|
+
|
+
|
|||||
|
5
|
Крейсерский полет
|
||||||||
|
5.a
|
Летно-технические характеристики (зависимость скорости от режима работы двигателей, конфигурации и условий полета)
|
||||||||
|
5.a.1
|
Горизонтальный полет по прямой
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
5.a.2
|
Изменение воздушной скорости
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
5.a.3
|
Управляемость на больших высотах
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.a.4
|
Управляемость при больших числах М (затягивание в пикирование при закритических числах М, скоростной бафтинг) и восстановление нормального положения (изменение балансировки)
|
+
|
+
|
+
|
+
|
||||
|
5.a.5
|
Сигнализация о превышении допустимой скорости Vmo или Мmo.
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.a.6
|
Управляемость при высокой приборной воздушной скорости
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b
|
Выполнение маневров
|
||||||||
|
5.b.1
|
Большие углы атаки, приближение к сваливанию, сигнализация сваливания, тряска и резкое изменение перегрузки, (конфигурации взлета, крейсерского полета, захода на посадку и посадки)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
5.b.2
|
Полет на малой скорости
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.3
|
Штопор
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.4
|
Защита области режимов полета (большие углы атаки, ограничения по крену, превышение скорости, снижение скорости ниже допустимой)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.5
|
Развороты с выпуском и без выпуска аэродинамических тормозов (интерцепторов)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.6
|
Нормальные и стандартные развороты
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
5.b.7
|
Крутые развороты
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
5.b.8
|
Характеристики маневренности при выполнении разворота
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
5.b.9
|
Остановка двигателя и повторный запуск двигателя в полете (с помощью ВСУ, генератора и авторотации)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.10
|
Маневрирование с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.11
|
Специальные летные характеристики
|
+
|
+
|
+
|
+
|
+
|
|||
|
5.b.12
|
Отказы системы управления полетом, режимы реконфигурации, переход на ручное управление
|
+
|
+
|
+
|
|||||
|
5.b.13
|
Планирование при вынужденной посадке
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.14
|
Визуальная разрешающая способность, управляемость и следующие характеристики тренажера:
|
||||||||
|
5.b.14.a
|
точность отображения местности при выборе зоны вынужденной посадки
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.14.b
|
точность отображения местности для навигации по правилам визуального полета
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.14.c
|
Выполнение маневров самолета в виде восьмерок вокруг высоких ориентиров (визуальная разрешающая способность)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.14.d
|
развороты вокруг ориентира
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
5.b.14.e
|
попеременные развороты в обе стороны относительно дороги или разделительной полосы
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
6
|
Снижение
|
||||||||
|
6.a
|
Нормальное
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
6.b
|
Максимальная скорость при аварийном снижении при различной конфигурации самолета (с убранными или выпущенными закрылками и шасси, с использованием аэродинамических тормозов)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
6.c
|
С использованием автопилота
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
6.d
|
Отказы системы управления полетом, режимы реконфигурации, переход на ручное управление
|
+
|
+
|
+
|
|||||
|
7
|
Заход на посадку и посадка по приборам
|
||||||||
|
Из приведенного ниже перечня должны быть выбраны только те испытания режимов захода на посадку и посадки по приборам, которые относятся к моделируемому типу или классу самолета, и эти испытания должны проводиться с учетом ограничений по скорости ветра, сдвигу ветра (за исключением точных заходов на посадку по категории II и III) и соответствующих отказов систем
|
|||||||||
|
7.a
|
Точный заход на посадку
|
||||||||
|
7.a.1
|
Заходы на посадку по категории I
|
||||||||
|
7.a.1.a
|
Заход на посадку в ручном режиме с использованием/без использования командно-пилотажного прибора, включая посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.a.1.b
|
Заход на посадку при совмещенном управлении с автоматом тяги в системе автопилота и посадка в ручном режиме
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.a.1.c
|
Заход на посадку при совмещенном управлении с автоматом тяги в системе автопилота с одним неработающим двигателем и несколькими отказавшими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.a.1.d
|
Заход на посадку в ручном режиме с неработающим(ими) двигателем(ями)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.a.1.e
|
Индикатор на лобовом стекле, бортовая система технического зрения с расширенными возможностями визуализации
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
7.a.1.f
|
Заход на посадку в ручном режиме с использованием или без использования командно-пилотажного прибора до 30 м (100 футов) ниже минимума категории I
|
||||||||
|
(i) с боковым ветром (максимальный продемонстрированный)
|
+
|
||||||||
|
(ii) со сдвигом ветра
|
+
|
||||||||
|
7.a.1.h
|
Заход на посадку при минимальном/выключенном электропитании
|
+
|
|||||||
|
7.a.2
|
Заходы на посадку категории II
|
||||||||
|
7.a.2.a
|
Заход на посадку по категории II при совмещенном управлении с автоматом тяги в системе автопилота до высоты принятия решения и посадка (в ручном и автоматическом режимах)
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.2.b
|
Заход на посадку по категории II при совмещенном управлении с автоматом тяги в системе автопилота с одним неработающим двигателем до высоты принятия решения и уход на второй круг в ручном и автоматическом режимах
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.2.c
|
Системы ИЛС и EFVS.
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.3
|
Заходы на посадку категории III
|
||||||||
|
7.a.3.a
|
Заход на посадку по категории III при совмещенном управлении с автоматом тяги в системе автопилота и управлении (если это применимо) пробегом (в ручном и автоматическом режимах)
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.3.b
|
Заход на посадку по категории III при совмещенном управлении с автоматом тяги в системе автопилота до высоты принятия решения и уход на второй круг в ручном и автоматическом режимах
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.3.c
|
Заход на посадку при совмещенном управлении с автоматом тяги в системе автопилота до приземления и пробеге (если это применимо) при одном неработающем двигателе (в ручном и автоматическом режимах)
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.3.d
|
Заход на посадку по категории III при совмещенном управлении с автоматом тяги в системе автопилота до высоты принятия решения и уход на второй круг с одним неработающим двигателем (в ручном и автоматическом режимах)
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.3.e
|
Системы ИЛС и EFVS
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.4
|
Заход на посадку при совмещенном управлении с автоматом тяги в системе автопилота (до посадки или ухода на второй круг):
|
||||||||
|
7.a.4.a
|
При отказе генератора электропитания
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.4.b
|
При максимальном сертифицированном или разрешенном значении попутного ветра
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.4.c
|
При максимальном фактическом или разрешенном боковом ветре
|
+
|
+
|
+
|
+
|
+
|
|||
|
7.a.5
|
Заход на посадку с помощью радиолокационных систем точного захода на посадку, со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.a.6
|
Заход на посадку с помощью микроволновая система посадки, наземная система функционального дополнения, со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.b
|
Неточный заход на посадку
|
||||||||
|
7.b.1
|
Заход на посадку с помощью обзорной радиолокационной станции, со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.b.2
|
Заход на посадку с помощью всенаправленного радиомаяка с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.b.3
|
Заход на посадку с помощью маяков VOR, DME, системы ближней аэронавигации (далее - TACAN), со всеми работающими двигателями, с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.b.4
|
Заход на посадку с помощью средств, обеспечивающих необходимые требуемые навигационные характеристики (далее - RNP) при номинальной и минимальной разрешенной температуре, глобальной навигационной спутников системы со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.b.5
|
Заходы на посадку с использованием только радиомаяка ILS и заходы на посадку с использованием ILS по обратному лучу курсового радиомаяка со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.b.6
|
Заход на посадку по курсовому радиомаяку системы ILS, со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.c
|
Процедуры захода на посадку с вертикальным наведением, с использованием спутниковой системы функционального дополнения вектора траектории полета
|
+
|
|||||||
|
7.c.1
|
Заход на посадку с вертикальным наведением с использованием барометрической вертикальной навигации со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
7.c.2
|
Процедуры захода на посадку с использованием систем обеспечивающей точностные характеристики выполнения полетов в условиях зональной навигации (далее - RNAV), со всеми работающими двигателями или с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8
|
Визуальный заход на посадку и посадка
|
||||||||
|
8.a
|
Маневрирование, нормальный заход на посадку и посадка с использованием и без использования визуальных и навигационных средств захода на посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8.b
|
Заход на посадку и посадка с одним или несколькими неработающими двигателями
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8.c
|
Функционирование шасси, закрылков, предкрылков и аэродинамических тормозов в нормальных и особых случаях)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8.d
|
Заход на посадку и посадка при боковом ветре (демонстрируется при максимальной величине бокового ветра)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
Заход на посадку при сдвиге ветра
|
+
|
||||||||
|
8.e
|
Заход на посадку и посадка при отказах системы управления полетом (режимы реконфигурации, возврат к ручному управлению и соответствующее управление при наиболее значительном, какое только возможно, ухудшении характеристик)
|
+
|
+
|
+
|
|||||
|
8.f
|
Заход на посадку и посадка с резервным питанием в электрической и гидравлической системе
|
+
|
+
|
+
|
+
|
+
|
|||
|
8.g
|
Заход на посадку и посадка с применением кругового маневрирования (заход на посадку по кругу)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
Для тренажеров типов III, V, VI, VII, D при проведении этого испытания требуется имитация как минимум аэропорта, в котором направления ВПП для захода на посадку и посадочной полосы отличаются на 90° или более, и 180° или менее. В изображении должны быть включены любые соответствующие предупредительные огни или другие визуальные средства, используемые в рамках опубликованной процедуры захода на посадку по кругу. Они должны быть размещены в надлежащих местах, иметь надлежащий цвет, направленность и характеристики. Для устройств типов II и IV модель имитируемого аэропорта должна соответствовать опубликованным данным, используемым для полетов самолетов, и включать ВПП для захода на посадку и посадки, которые могут освещаться одновременно. Все соответствующие предупредительные огни или другие визуальные средства, используемые в рамках опубликованной схемы захода на посадку по кругу, должны располагаться в надлежащих местах и иметь надлежащий цвет и характеристики
|
|||||||||
|
8.h
|
Заход на посадку и посадка по визуальной схеме движения
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8.i
|
Заход на посадку и посадка при выполнении неточного захода на посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8.j
|
Заход на посадку и посадка при выполнении точного захода на посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
Заход на посадку и посадка при неисправностях:
|
|||||||||
|
а) продольной балансировки (триммирования)
|
+
|
||||||||
|
б) поперечной-путевой балансировки (триммирования)
|
+
|
||||||||
|
8.k
|
Прочие
|
||||||||
|
В том случае, если система визуализации тренажера позволяет выполнять заход на посадку по специальным схемам в соответствии с применяемыми правилами, то тренажер может получить допуск на их использование при подготовке персонала
|
|||||||||
|
9
|
Повторный заход на посадку
|
||||||||
|
9.a
|
Все двигатели работают, ручной режим и режим автопилота
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
9.b
|
Неработающий(е) двигатель(и), ручной режим и режим автопилота
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
9.c
|
Прерванная посадка
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
9.d
|
В автоматическом режиме, при отказах системы управления полетом, в режимах реконфигурации и при возврате к режиму ручного управления
|
+
|
+
|
+
|
|||||
|
10
|
Действия на земле (посадка, после посадки и после полета)
|
||||||||
|
10.a
|
Послепосадочный пробег и руление
|
||||||||
|
10.a.1
|
Системы ИЛС и EFVS
|
+
|
+
|
+
|
+
|
+
|
|||
|
10.a.2
|
Работа интерцепторов
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
10.a.3
|
Работа реверса тяги
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
10.a.4
|
Путевое управление и управляемость при рулении, с использованием и без использования реверса тяги
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
10.a.5
|
Снижение эффективности руля направления при увеличении реверса тяги (двигатели размещены в гондолах в хвостовой части фюзеляжа)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
10.a.6
|
Работа тормозной системы и противогюзовых устройств:
|
||||||||
|
10.a.6.a
|
Работа тормозной системы и противогюзовых устройств в условиях сухой, влажной, обледеневшей, частично влажной, частично обледеневшей ВПП и влажной на следах резины в зоне касания носовым колесом
|
+
|
+
|
+
|
|||||
|
10.a.6.b
|
Работа тормозной системы и противогюзовых устройств на сухой и влажной ВПП
|
+
|
+
|
+
|
|||||
|
10.a.6.c
|
Работа тормозной системы и противогюзовых устройств на сухой ВПП
|
+
|
+
|
||||||
|
10.a.6.d
|
Работа системы автоматического торможения
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
10.a.7
|
Прочие
|
||||||||
|
10.b
|
Выключение двигателя на стоянке
|
||||||||
|
10.b.1
|
Работа двигателя и систем
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
10.b.2
|
Работа стояночного тормоза
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
10.b.3
|
Прочие
|
||||||||
|
11
|
Любой этап полета
|
||||||||
|
11.a
|
Работа систем самолета и двигателя (если установлены)
|
||||||||
|
11.a.1
|
Система наддува и кондиционирования воздуха (система жизнеобеспечения)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.2
|
Противообледенительная
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.3
|
ВСУ
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.4
|
Система связи
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.5
|
Система электроснабжения
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.6
|
Система обнаружения дыма и огня, система пожаротушения
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.7
|
Рычаги управления самолетом
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.8
|
Топливная и масляная система
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.9
|
Гидравлическая система
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.10
|
Пневмосистема.
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.11
|
Шасси
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.12
|
Кислородная система
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.13
|
Двигатель
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.14
|
Бортовая РЛС
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.15
|
Автопилот и пилотажный командный прибор
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.16
|
Системы предупреждения об опасности сближения с землей и системы предупреждения столкновений воздушных судов
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.17
|
Бортовые компьютеры системы управления полетом, включая системы повышения устойчивости и управляемости
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.18
|
Системы индикации полетной информации
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.19
|
Системы индикации пилотажных данных
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.20
|
Системы ИЛС и EFVS
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.21
|
Навигационные системы
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.a.22
|
Система сигнализации/предотвращения сваливания
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.a.23
|
Оборудование предупреждения о сдвиге ветра (оборудование для восстановления положения при сдвиге ветра)
|
+
|
+
|
+
|
|||||
|
11.a.24
|
Система защиты от выхода за пределы допустимой области режимов полета
|
+
|
+
|
||||||
|
11.a.25
|
Электронная система бортовой документации.
|
+
|
+
|
+
|
|||||
|
11.a.26
|
Автоматические перечни контрольных проверок (порядок действий в штатных, особых и аварийных ситуациях)
|
+
|
+
|
+
|
+
|
||||
|
11.a.27
|
Системы уведомления об опасности на ВПП и консультативная система
|
+
|
+
|
+
|
|||||
|
11.a.28
|
Прочие
|
||||||||
|
11.b
|
Порядок действий в воздухе
|
||||||||
|
11.b.1
|
Полет в зоне ожидания
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
11.b.2
|
Предотвращение опасных ситуаций в воздухе (воздушное движение, метеоусловия, включая визуальное соответствие)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.b.3
|
Сдвиг ветра:
|
||||||||
|
11.b.3.a
|
перед отрывом носового колеса при разбеге
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.b.3.b
|
при отрыве от земли при взлете
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.b.3.c
|
на начальном участке набора высоты
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
11.b.3.d
|
на конечном этапе захода на посадку, на высоте ниже 150 м (500 футов) над уровнем земли
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12
|
Система визуализации
|
||||||||
|
Должны воспроизводиться модели аэропортов, регулярно используемые в программах подготовки, и которые, если это применимо, могут представляться для утверждения режимов заходов на посадку по кругу. Если требования к типу тренажера предусматривают обязательную имитацию аэропорта, но эксплуатантом тренажера не определены конкретные аэропорты для имитации, то для первоначально оценки могут использоваться демонстрационные модели, которые не обязательно точно воспроизводят какой-то конкретный аэропорт
|
|||||||||
|
При периодической оценке для выполнения функциональных и субъективных испытаний уполномоченный орган может выбрать любые визуальные картины, используемые в учебной программе эксплуатанта, но при условии, что они моделировались с учетом требуемых характеристик
|
|||||||||
|
12.a
|
Требования к содержанию функциональных испытаний
|
||||||||
|
Ниже приведены минимальные требования к содержанию модели аэропорта, которые обеспечивают тестирование возможностей системы визуализации и воспроизведение визуальных эффектов, позволяющих провести все функциональные и субъективные испытания. Для проведения функциональных и субъективных испытаний эксплуатантам тренажера рекомендуется использовать приведенное ниже описание содержания моделей
|
|||||||||
|
12.a.1
|
Картины аэропортов
|
||||||||
|
12.a.1.a
|
Минимум три модели реальных аэропортов в соответствии с опубликованными данными, используемыми для полетов самолетов, демонстрирующие все указанные ниже характеристики системы визуализации. Каждая модель должна быть в отдельной визуальной картине, что позволяет оценивать их автоматические изменения. Каждая модель аэропорта должна выбираться с РМИ
|
+
|
+
|
+
|
|||||
|
12.a.1.b
|
Минимум одна модель реального аэропорта в соответствии с опубликованными данными, используемыми для полетов самолетов. Модель должна быть приемлема для уполномоченного органа, эксплуатанта и выбираться с РМИ
|
+
|
+
|
||||||
|
12.a.1.c
|
Минимум одна модель типового аэропорта в соответствии с опубликованными данными, используемыми для полетов самолетов. Модель должна быть приемлема для уполномоченного органа, эксплуатанта и выбираться с РМИ
|
+
|
+
|
||||||
|
12.a.2
|
Точность воспроизведения визуальной картины
|
||||||||
|
12.a.2.a
|
На визуальной картине должны точно воспроизводиться те части аэропорта и прилегающей к нему местности окрестности, которые используются в программе подготовки
|
+
|
+
|
+
|
+
|
||||
|
12.a.2.b
|
Точность воспроизведения визуальной картины должна быть достаточной для того, чтобы экипаж мог визуально распознать аэропорт; определить положение моделируемого самолета; успешно выполнять взлеты, заходы на посадку и посадки; а также при необходимости выполнять маневрирование на территории аэропорта
|
+
|
+
|
||||||
|
12.a.2.c
|
Точность воспроизведения визуальной картины должна быть достаточной для того, чтобы экипаж мог успешно выполнять взлеты, заходы на посадку и посадки
|
+
|
+
|
||||||
|
12.a.3
|
Взлетно-посадочные полосы и рулежные дорожки
|
||||||||
|
12.a.3.a
|
Взлетно-посадочные полосы и рулежные дорожки аэропорта
|
+
|
+
|
+
|
|||||
|
12.a.3.b
|
Типовые взлетно-посадочные полосы и рулежные дорожки
|
+
|
+
|
+
|
|||||
|
12.a.3.c
|
Базовые взлетно-посадочные полосы и рулежные дорожки
|
+
|
+
|
||||||
|
12.a.4
|
Если в картине аэропорта одновременно воспроизводятся две параллельные ВПП и одна пересекающаяся, то должно обеспечиваться одновременное освещение минимум двух ВПП
|
+
|
+
|
+
|
|||||
|
12.a.5
|
Для обеспечения корреляции с системами самолета (ИЛС, GPS/ГЛОНАСС, компас, высотомер), необходимо моделировать превышения входной кромки ВПП и ее расположение.
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.6
|
Воспроизведение уклонов ВПП, рулежных дорожек и съездов не должно создавать отвлекающие или нереалистичные эффекты, включая изменение высоты положения глаз пилота
|
+
|
+
|
+
|
|||||
|
12.a.7
|
В соответствующих случаях покрытие и маркировка каждой используемой взлетно-посадочной полосы, включая следующее:
(Эта характеристика, если требуется, должна быть типовой для тренажеров типов I и III и базовой для типов II и IV)
|
||||||||
|
12.a.7.a
|
Маркировка порога ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.b
|
Номера ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.c
|
Маркировка зоны приземления
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.a.7.d
|
Маркировка фиксированного расстояния
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.a.7.e
|
Маркировка границ ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.a.7.f
|
Маркировка осевой линии ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.g
|
Знаки оставшейся дистанции
|
+
|
+
|
+
|
|||||
|
12.a.7.h
|
Знаки на пересечении ВПП и рулежных дорожек
|
+
|
+
|
+
|
|||||
|
12.a.7.i
|
Ветровой конус, позволяющий определить соответствующие силу и направление ветра
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8
|
Соответствующие цвета, направленность, характеристики и расположение светосигнального оборудования имитируемой ВПП, включая следующее:
(Эта характеристика, если требуется, должна быть типовой для тренажеров типов I и III и базовой для типов II и IV)
|
||||||||
|
12.a.8.a
|
Огни порога ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b
|
Посадочные огни ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.c
|
Ограничительные огни ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.d
|
Огни осевой линии
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.e
|
Огни зоны приземления
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.f
|
Огни выводных рулежных дорожек
|
+
|
+
|
+
|
+
|
||||
|
12.a.8.g
|
Соответствующие средства визуальной посадки на ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.8.h
|
Соответствующая система огней подхода к ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.9
|
Покрытие и маркировка рулежных дорожек:
(Эта характеристика, если требуется, должна быть типовой для тренажеров типов I и III и базовой для типов II и IV)
|
||||||||
|
12.a.9.a
|
Маркировка кромки
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.9.b
|
Маркировка осевой линии
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.9.c
|
Маркировка предварительного старта на ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.9.d
|
Маркировка критической зоны приземления по приборам
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.a.9.e
|
Для разрешенных полетов в условиях ограниченной видимости должно быть продемонстрировано следующее: все маркировки рулежных дорожек, освещение и указатели руления как минимум от места назначенной стоянки до назначенной ВПП и обратно после посадки на назначенную ВПП на назначенное место стоянки; а также маршрут руления в условиях ограниченной видимости (система управления движением на земле, автомобиль сопровождения, дневные рулежные огни). Назначенная ВПП и маршрут руления должны соответствовать аэропорту, в котором разрешены полеты в условиях ограниченной видимости
|
+
|
+
|
||||||
|
12.a.10
|
Соответствующие цвета, направленность, характеристики и расположение светосигнального оборудования рулежных дорожек (связанных с каждой имитируемой ВПП):
(Эта характеристика, если требуется, должна быть типовой для тренажеров типов I и III и базовой для типов II и IV)
|
||||||||
|
12.a.10.a
|
Посадочные огни
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.10.b
|
Огни осевой линии
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.10.c
|
Огни зоны предварительного старта
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.11
|
Необходимая корреляция визуальной модели с другими имитируемыми компонентами окружающей обстановки аэропорта
|
||||||||
|
12.a.11.a
|
Модель аэропорта должна быть согласована с соответствующими навигационными средствами, обеспечивающими движение самолетов на имитируемой ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
12.a.11.b
|
Моделирование загрязнения ВПП должно коррелироваться с воспроизводимой поверхностью и освещением ВПП
|
+
|
+
|
||||||
|
12.a.12
|
Здания, постройки и светосигнальное оборудование аэропорта
|
||||||||
|
12.a.12.a
|
Здания, постройки и освещение
|
||||||||
|
12.a.12.a.1
|
Здание, постройки и светосигнальное оборудование реального аэропорта
|
+
|
+
|
+
|
|||||
|
12.a.12.a.2
|
Здания, постройки и светосигнальное оборудование типового аэропорта
|
+
|
+
|
+
|
|||||
|
12.a.12.a.3
|
Здания, постройки и светосигнальное оборудование базового аэропорта
|
+
|
+
|
||||||
|
12.a.12.b
|
Как минимум один используемый выход из терминала, установленный на соответствующей высоте (требуется только для самолетов, обычно выруливающих от выходов из терминала)
|
+
|
+
|
+
|
|||||
|
12.a.12.c
|
Типовые движущиеся и неподвижные препятствия у выхода терминала (другие самолеты, тележки аэродромного питания, буксировщики, топливозаправщики, дополнительные выходы)
|
+
|
+
|
+
|
+ <*>
|
+
|
|||
|
12.a.12.d
|
Маркировка выходов и перрона (указатели об опасности, линиях заруливания, номерах выходов), освещение и средства стыковки с выходом или аэродромный сигнальщик
|
+
|
+
|
||||||
|
12.a.13
|
Местность и препятствия
|
||||||||
|
12.a.13.a
|
Местность и препятствия в радиусе 46 км от соответствующего аэропорта
|
+
|
+
|
+
|
|||||
|
12.a.13.b
|
Типовое изображение местности и препятствий в радиусе 46 км от соответствующего аэропорта
|
+
|
+
|
+
|
|||||
|
12.a.14
|
Заметные и узнаваемые естественные и искусственные объекты
|
||||||||
|
12.a.14.a
|
Заметные и узнаваемые естественные и искусственные объекты в радиусе 46 км от соответствующего аэропорта
(Это требование относится к естественным и искусственным объектам, обычно используемыми пилотами для ориентации в полете. В отношении удаленных аэропортов, не предназначенных для посадки, должно предоставляться только достаточно понятное изображение направлений ВПП)
|
+
|
+
|
+
|
|||||
|
12.a.14.b
|
Типовое отображение заметных и узнаваемых естественных и искусственных объектов в радиусе 46 км от соответствующего аэропорта.
(Это требование относится к естественным и искусственным объектам, обычно используемыми пилотами для ориентации в полете. В отношении удаленных аэропортов, не предназначенных для посадки, должно предоставляться только достаточно понятное изображение направлений ВПП)
|
+
|
+
|
+
|
|||||
|
12.a.14.c
|
Типовое воздушное движение (включая возможность воспроизводить опасности в воздухе - ВС, птицы, опасные метеоявления на курсе возможного столкновения)
|
+
|
+
|
+
|
+
|
+ <*>
|
|||
|
12.b
|
Управление визуальной картиной
|
||||||||
|
12.b.1
|
Должна обеспечиваться регулировка интенсивности освещения в соответствии с 6 уровнями: (от 0 до 5) всех ВПП, рулежных дорожек аэропорта, огней приближения и искусственных сооружений для любого вида захода на посадку; все точечные источники света визуальной картины должны соответствующим образом постепенно угасать
|
+
|
+
|
+
|
|||||
|
12.b.2
|
Интенсивность освещения всех ВПП, рулежных дорожек аэропорта, огней приближения и искусственных сооружений для любого вида захода на посадку должна соответствовать типовой интенсивности, используемой при тренировках пилотов для заданного уровня видимости; все точечные источники света визуальной картины должны соответствующим образом постепенно угасать
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.b.3
|
Должна реалистично воспроизводиться направленность проблесковых огней, огней подхода, посадочных огней ВПП, средств визуальной посадки, огней осевой линии ВПП, огней порога ВПП и огней зоны приземления на ВПП предполагаемой посадки
|
+
|
+
|
+
|
|||||
|
12.c
|
Опознавание визуальных объектов
|
||||||||
|
12.c.1
|
Определение ВПП, проблесковые огни, огни приближения и белые посадочные огни на расстоянии 8 км от порога ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.c.2
|
Огни средств визуального захода на посадку
|
||||||||
|
12.c.2.a
|
Огни средств визуального захода на посадку на расстоянии 8 км от порога ВПП
|
+
|
+
|
+
|
|||||
|
12.c.2.b
|
Огни средств визуального захода на посадку на расстоянии 4,8 км от порога ВПП
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.c.3
|
Огни осевой линии ВПП и определение рулежной полосы на расстоянии 4,8 км
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.c.4
|
Огни порога ВПП и огни зоны приземления на расстоянии 3,2 км
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.c.5
|
Маркировка ВПП в пределах диапазона освещения посадочных огней для темного времени суток; согласно требованиям по оценке разрешающей способности поверхности для светлого времени суток
|
+
|
+
|
+
|
|||||
|
12.c.6
|
При выполнении заходов на посадку по кругу, освещение ВПП предполагаемой посадки и соответствующее освещение должно постепенно угасать, не отвлекая пилота
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.d
|
Возможность воспроизведения визуальной картины выбранного аэропорта в:
|
||||||||
|
12.d.1
|
Ночное время
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.d.2
|
Сумерки
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.d.3
|
Дневное время
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.d.4
|
Динамические эффекты - возможность воспроизводить многочисленные опасности на земле и в воздухе, другой самолет, пересекающий действующую ВПП или сходящиеся маршруты движения в воздухе; опасности должны выбираться с помощью органов управления на рабочем месте инструктора
|
+
|
+
|
+
|
+
|
+ <*>
|
|||
|
12.d.5
|
Ложное восприятие (иллюзии) - визуальные изображения, отражающие характерные физические отношения, вызывающие иллюзии при посадке, короткие ВПП, заходы на посадку над водной поверхностью, ВПП с уклоном или подъемом, возвышение ландшафта в районе траектории захода на посадку и другие уникальные топографические особенности
|
+
|
+
|
||||||
|
Ложные восприятия (иллюзии) могут быть продемонстрированы в условиях аэропорта базового уровня или аэропорта высокого уровня точности воспроизведения характеристик
|
|||||||||
|
12.e
|
Корреляция с самолетом и соответствующим оборудованием
|
||||||||
|
12.e.1
|
Визуальные эффекты в соотнесении с реакцией реального самолета
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.e.2
|
Визуальные эффекты во время взлета, захода на посадку и посадки
|
||||||||
|
12.e.2.a
|
Визуальные эффекты для оценки вертикальной скорости снижения и восприятия глубины пространства при посадках
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.e.2.b
|
Визуальные эффекты, достаточные для определения изменений траектории захода на посадку используя перспективу ВПП. Изменения визуальных эффектов во время взлета, захода на посадку и посадки не должны отвлекать пилота
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.e.3
|
Точное изображение окружающей обстановки в зависимости от пространственного положения самолета
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.e.4
|
Визуальная картина должна соответствовать показаниям приборов комплексных систем самолета, если они установлены (системы предотвращения столкновений с землей и встречным движением и обхода районов неблагоприятных метеоусловий, а также систем ИЛС и EFVS)
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
12.e.5
|
Должно обеспечиться воспроизведение эффектов работы стеклоочистителей (удаление дождевых капель)
|
+
|
+
|
||||||
|
12.f
|
Качество изображения
|
||||||||
|
12.f.1
|
Квантование
|
||||||||
|
12.f.1.a
|
Отображаемые поверхности и их текстура не должны иметь видимой дискретности (ступенчатости)
|
+
|
+
|
+
|
+
|
||||
|
12.f.1.b
|
Отображаемые поверхности и их текстура не должны создавать отвлекающей внимание дискретности (ступенчатости)
|
+
|
+
|
+
|
+
|
||||
|
12.f.2
|
Система должна воспроизводить многоцветные реалистичные текстурные эффекты
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.f.3
|
Точечные источники света не должны иметь дрожания, смазанности или полос
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
12.f.4
|
Система должна обеспечивать фокусный эффект для моделирования дождя
|
+
|
+
|
||||||
|
12.f.5
|
Система должна обеспечивать перспективное увеличение точечных источников света
|
+
|
+
|
+
|
+
|
+
|
|||
|
12.g
|
Эффекты внешней обстановки
|
||||||||
|
12.g.1
|
Воспроизводимая картина должна соответствовать видам загрязнения поверхности ВПП и включать в себя соответствующее отражение освещения ВПП с учетом эффектов влажности, частично затемненных из-за снега огней или других соответствующих эффектов
|
+
|
+
|
+
|
|||||
|
12.g.2
|
Воспроизведение особых метеоусловий, включая акустические эффекты, акселерационные эффекты и визуальные эффекты, средние и значительные осадки, приближение грозы на взлете, при заходе на посадку и посадке на высоте 610 м и ниже над уровнем аэродрома и в радиусе 16 км от аэропорта
|
+
|
+
|
+
|
|||||
|
12.g.3
|
Визуальная картина одного заснеженного аэропорта, если это соответствует условиям зоны выполняемых эксплуатантом полетов, включая покрытые снегом местность, ВПП и рулежные дорожки
|
+
|
+
|
||||||
|
12.g.4
|
Должны воспроизводиться эффекты, возникающие при выполнении полетов в облаках: переменная плотность облаков, эффекты скорости, изменения окружающей обстановки
|
+
|
+
|
+
|
|||||
|
12.g.5
|
Эффект многослойной облачности, включая отдельные, рассеянные и разорванные облака, а также сплошную облачность, которая частично или полностью препятствует обзору поверхности земли
|
+
|
+
|
+
|
|||||
|
12.g.6
|
Постепенный выход из облаков и переход к видимости окружающей обстановки/дальности видимости на ВПП, определяемой как 10% от соответствующей нижней или верхней границы облаков, 6 м <= переходный слой <= 61 м
|
+
|
+
|
+
|
|||||
|
Эффекты облачности следует проверять на высоте 610 м над уровнем аэродрома и ниже, и в радиусе 16 км от аэропорта. Эффекты перехода должны быть полными при входе в облака и выходе из облаков при достижении нижней или верхней кромки облачности, которые вводятся с РМИ, и эффекты перехода должны происходить в пределах слоя облачности, задаваемого с РМИ
|
|||||||||
|
12.g.7
|
Видимость и дальность видимости на ВПП измеряются в единицах расстояния. Видимость и дальность видимости на ВПП следует проверять на высоте 610 м и ниже над уровнем аэродрома и в радиусе 16 км от аэропорта.
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
Дальность видимости на ВПП требуется только для типов V, VI и VII
|
|||||||||
|
12.g.8
|
Местами туман, иногда называемый неоднородной RVR, создает эффект изменяющейся дальности видимости на ВПП. Самая низкая RVR должна соответствовать значению, заданному с рабочего места инструктора, изменение, может быть только более RVR, заданной инструктором
|
+
|
+
|
||||||
|
12.g.9
|
Влияние тумана на освещение аэропорта:
ореолы;
размытость изображения
|
+
|
+
|
||||||
|
12.g.10
|
Влияние собственных огней самолета в условиях ограниченной видимости, отражение бликов, включая посадочные огни, проблесковые огни и маяки
|
+
|
+
|
||||||
|
12.g.11
|
Признаки ветра для создания эффекта метели или песчаной бури на сухой ВПП или рулежной дорожке должны вводиться с РМИ
|
+
|
+
|
||||||
|
13
|
Акселерационные эффекты
|
||||||||
|
Для обозначения порога чувствительности, при котором член экипажа должен распознавать событие или ситуацию, определены следующие акселерационные эффекты. Там, где это применимо, характеристики тангажа, боковой перегрузки и путевого управления, создаваемые тренажером, должны быть типовыми для самолета.
|
|||||||||
|
13.a
|
Эффекты руления, ощущения поперечного и путевого движения, возникающие в результате входных сигналов управления и торможения
|
+
|
+
|
+
|
|||||
|
13.b
|
Эффекты тряски при движении по ВПП:
обжатие стоек шасси;
скорость движения по земле,
движение по неровной ВПП;
огни осевой линии ВПП
загрязнение ВПП с соответствующими характеристиками торможения и руления
|
+
|
+
|
+
|
|||||
|
13.c
|
Тряска на земле при выпуске интерцепторов/аэродинамических тормозов и по причине изменения тяги двигателей
|
+
|
+
|
+
|
|||||
|
13.d
|
Толчки, связанные с работой шасси
|
+
|
+
|
+
|
|||||
|
13.e
|
Тряска при выпуске и уборке шасси
|
+
|
+
|
+
|
|||||
|
13.f
|
Тряска в воздухе в результате выпуска закрылков и интерцепторов (аэродинамических тормозов)
|
+
|
+
|
+
|
|||||
|
13.g
|
Тряска в результате атмосферных возмущений
|
+
|
+
|
||||||
|
13.h
|
Тряска при приближении к сваливанию
|
+
|
+
|
+
|
|||||
|
13.i
|
Признаки касания ВПП основным и носовым шасси
|
+
|
+
|
+
|
|||||
|
13.j
|
Скольжение носового колеса
|
+
|
+
|
+
|
|||||
|
13.k
|
Эффект тяги при установке на тормоза
|
+
|
+
|
+
|
|||||
|
13.l
|
Скоростной бафтинг и тряска при маневрировании
|
+
|
+
|
+
|
|||||
|
13.m
|
Динамика разрушения пневматика
|
+
|
+
|
+
|
|||||
|
13.n
|
Отказы двигателя, неисправности, повреждение конструкции двигателя и планера
|
+
|
+
|
+
|
|||||
|
13.o
|
Удары от попадания посторонних предметов в хвостовое оперение, гондолу двигателя и воздушный винт, крыло
|
+
|
+
|
+
|
|||||
|
14
|
Акустическая система
|
Акустическая модель должна предусматривать возможность моделирования звуков погодных условий и природных явлений включающие: звуки различной интенсивности осадков (дождь, град), раскатов грома (грозы), ветра, смерч, тайфун, вулканические осадки и выбросы лавы, камнепада, сель, звук прибрежных волн и цунами
|
|||||||
|
14.a
|
Требования по направленности звука изложены в пункте 6.5
|
+
|
+
|
+
|
+
|
||||
|
14.b
|
Существенные шумы, создаваемые системами самолета и воспринимаемые пилотом во время выполнения обычных полетов (шумы двигателя, аэродинамический шум, шумы трансмиссии, винтов, всу, гидравлики, электрооборудования), которые сопоставимы с уровнем шума зарегистрированным в протоколах измерений и входящих в ПИД
|
+
|
+
|
+
|
|||||
|
14.c
|
Существенные шумы в кабине экипажа самолета и шумы, в результате действий пилота создаваемые системами самолета и воспринимаемые пилотом во время выполнения обычных полетов (шумы двигателя, аэродинамический шум, шумы трансмиссии, винтов, всу, гидравлики, электрооборудования), которые сопоставимы с уровнем шума зарегистрированным в протоколах измерений и входящих в ПИД
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
14.d
|
Нештатные режимы выполнения полета, для которых имеются соответствующие данные по акустическим шумам при неисправностях двигателя, винтов, трансмиссии, шасси, повреждении пневматиков
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
14.e
|
Звук удара при приземлении в условиях превышения ограничений
|
+
|
+
|
+
|
+
|
+
|
|||
|
15
|
Специальные эффекты
|
||||||||
|
15.a
|
Динамика торможения при нормальном состоянии и при использовании противогюзовой системы - динамическое проявление отказа тормозной и противоюзовой системы, а также снижение эффективности торможения из-за нагрева тормозов
|
+
|
+
|
+
|
|||||
|
15.b
|
Эффекты обледенения планера и двигателя
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
16
|
Моделирование УВД
|
||||||||
|
16.a
|
Автоматизированное управление движением в динамичной воздушной обстановке
|
+
|
+
|
||||||
|
16.b
|
Передача речевых сообщений, фоновый шум движения
|
+
|
+
|
||||||
|
16.c
|
Автоматическая передача метеосводок
|
+
|
+
|
+
|
+
|
+
|
|||
|
16.d
|
Линия связи коллективного пользования (фоновый шум)
|
+
|
+
|
+
|
+
|
+
|
|||
|
16.e
|
Моделирование взаимодействия системы связи с тренажером
|
+
|
+
|
||||||
|
16.f
|
Моделирование связи взаимодействия с инструктором
|
+
|
+
|
||||||
|
16.g
|
Инициирование сообщений
|
+
|
+
|
||||||
|
16.h
|
Связь по линии передачи данных
|
+
|
+
|
||||||
|
16.i
|
Корреляция с другим информационным обменом
|
+
|
+
|
||||||
|
16.j
|
Фразеология
|
+
|
+
|
+
|
+
|
+
|
|||
|
16.k
|
Определение частот УВД, соответствующих конкретному этапу полета
|
+
|
+
|
+
|
+
|
+
|
|||
|
16.l
|
Другие виды связи (отправка сообщений, связь при техническом и наземном обслуживании ВС, связь с кабинным экипажем)
|
+
|
+
|
||||||
|
16.m
|
Переход инструктора на ручное управление системой УВД
|
+
|
+
|
+
|
+
|
+
|
|||
|
17
|
РМИ
|
||||||||
|
17.a
|
Изменение положения (изменение положения, чтобы оно стало более удобным, должно проводиться с соответствующей скоростью и при конфигурации с учетом отправных точек):
|
||||||||
|
17.a.1
|
Перрон
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.a.2
|
Взлет
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.a.3
|
Заход на посадку
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.b
|
Перенастройки
|
||||||||
|
17.b.1
|
Система
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.b.2
|
Температура
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.b.3
|
Жидкости и компоненты
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.c
|
Окружающая обстановка
|
||||||||
|
17.c.1
|
Установка метеоусловий
|
||||||||
|
Без ограничений, облачность и видимость в норме (в условиях CAVOK), правила визуальных полетов, посадка по неточным системам посадки, посадка по системам, обеспечивающим посадку по категориям I, II, III, в соответствующих случаях EFVS
|
+
|
+
|
+
|
||||||
|
17.c.1.b
|
Без ограничений, облачность и видимость в норме (в условиях CAVOK), правила визуальных полетов
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
17.c.2
|
Визуальные эффекты
|
||||||||
|
17.c.2.a
|
Время суток (день, сумерки, ночь); облачность (верхняя граница, нижняя граница, типы, плотность); видимость в км или статутных милях: RVR в метрах (футах), специальные эффекты (осадки, грозы, метель, песчаная буря)
|
+
|
+
|
||||||
|
17.c.2.b
|
Время суток (день, сумерки, ночь); облачность (верхняя граница, нижняя граница, типы, плотность); видимость в км или статутных милях:
RVR в метрах или футах;
специальные эффекты (осадки, грозы)
|
+
|
|||||||
|
17.c.2.c
|
Время суток (день, сумерки, ночь), облачность (верхняя граница, нижняя граница), видимость в км или статутных милях
|
+
|
+
|
+
|
+
|
+
|
|||
|
17.c.3
|
Ветер
|
||||||||
|
17.c.3.a
|
Приземный
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.c.3.b
|
Промежуточные уровни
|
+
|
+
|
+
|
|||||
|
17.c.3.c
|
Типичный градиент
|
+
|
+
|
+
|
|||||
|
17.c.3.d
|
порыв с соответствующим изменением курса и скорости
|
+
|
+
|
+
|
|||||
|
17.c.3.e
|
Турбулентность
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.c.4
|
Температура наружного воздуха у земли
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.c.5
|
Атмосферное давление (атмосферное давление, приведенное к уровню моря, атмосферное давление на высоте аэродрома)
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.d
|
Аэропорт
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
17.d.1
|
Выбор ВПП
|
||||||||
|
17.d.1.a
|
Включает выбор действующей ВПП, и в соответствии с аэропортом должна обеспечиваться возможность освещения минимум одной дополнительной параллельной или пересекающейся ВПП
|
+
|
+
|
+
|
|||||
|
17.d.1.b
|
Включает выбор действующей ВПП
|
+
|
+
|
+
|
+
|
||||
|
17.d.2
|
Освещение аэропорта
|
||||||||
|
17.d.2.a
|
Освещение аэропорта, включая изменение его интенсивности, и контроль снижения освещения рулежной дорожки и стоп-линии в условиях ухудшающейся видимости
|
+
|
+
|
+
|
+
|
||||
|
17.d.2.b
|
Освещение аэродрома
|
+
|
+
|
+
|
+
|
||||
|
17.d.3
|
Динамические эффекты, включая движение на земле и воздухе
|
+
|
+
|
+
|
+
|
+
|
+
|
||
|
17.e
|
Конфигурация самолета:
топливо;
вес;
центр тяжести
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.f
|
перезагрузка запрограммированных данных, если этому не препятствует установленное оборудование
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
17.g
|
Регистрация и построение графиков (взлет и посадка)
|
+
|
+
|
+
|
+
|
+
|
|||
|
17.h
|
Введение (снятие) сигнализации об отказах и неисправностях
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
Таблица A2
1. Кабина летного экипажа - компоновка и конструкция:
|
1.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК КОМПОНОВКИ И КОНСТРУКЦИИ КАБИНЫ ЛЕТНОГО ЭКИПАЖА
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
1.S
|
Закрытая полномасштабная копия кабины летного экипажа вертолета с полностью функционирующими рычагами управления полетом, приборами, и переключателями для обеспечения заявленного использования.
Нет необходимости в функционировании элементов, доступ к которым не требуется членам летного экипажа в любом из режимов эксплуатации
|
+
|
+
|
+
|
Остекление тренажера должно соответствовать остеклению реального вертолета, чтобы исключить отвлекающие факторы и обеспечить восприятие закрытой кабины
|
||
|
Должны воспроизводиться окна в нижней носовой части фюзеляжа, если они имеются на вертолете
|
|||||||
|
Для устройства, утвержденного для тренировки с очками ночного видения, требуется остекление кабины экипажа, которое обеспечивает реалистичное отражение внутреннего освещения
|
|||||||
|
1.R
|
Закрытая или воспринимаемая как закрытая кабина летного экипажа, в которой не должно быть отвлекающих факторов и которая является типовой для группы имитируемых вертолетов для обеспечения заявленного применения
|
+
|
+
|
Устройство, утвержденное для тренировки с очками ночного видения, должно иметь остекление кабины экипажа, если у вертолета имеется такая характеристика
|
|||
|
1.G
|
Открытая, закрытая или воспринимаемая как закрытая кабина летного экипажа, в которой не должно быть отвлекающих факторов и которая является типовой для группы имитируемых вертолетов для обеспечения заявленного применения
|
||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК КОМПОНОВКИ И КОНСТРУКЦИИ КАБИНЫ ЛЕТНОГО ЭКИПАЖА
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
|
1.1
|
КОНСТРУКЦИЯ КАБИНЫ ЛЕТНОГО ЭКИПАЖА
|
||||||
|
1.1.1.S
|
Кабина летного экипажа (имитируемая часть):
|
Кабина летного экипажа (имитируемая часть):
|
|||||
|
Закрытая полномасштабная точная копия кабины летного экипажа имитируемого вертолета, включая конструктивные элементы, перегородки и панели управления; основные и вспомогательные рычаги управления полетом;
рычаги управления двигателем и несущим винтом; АЗС; пилотажные приборы; системы связи навигационное и другое аналогичное оборудование;
системы сигнализации и оповещения; аварийное оборудование и все другое оборудование и системы с соответствующими органами управления и видимыми индикаторами в кабине летного экипажа
|
+
|
+
|
+
|
При моделировании условий полета вертолета в кабине летного экипажа должно имитироваться все пространство перед поперечным сечением фюзеляжа при самом заднем расположении кресел членов летного экипажа, либо, если применимо, перед поперечным сечением, расположенным непосредственно за креслами дополнительных членов летного экипажа и/или необходимыми перегородками
|
|||
|
Системы или функции, которые не требуются для программы подготовки пилотов, необязательно должны поддерживаться программным обеспечением имитации, но любое видимое оборудование и соответствующие рычаги управления и переключатели должны быть установлены. В случаях, когда установленные системы задействуются при выполнении штатных, нештатных или аварийных процедур в кабине летного экипажа, их функционирование должно воспроизводиться в объеме, необходимом для точного воспроизведения поведения вертолета при выполнении таких процедур. Такие системы или функции, не поддерживаемые программным обеспечением имитации, должны указываться в информационном листе в программе испытаний тренажера
|
|||||||
|
Необходимые дополнительные рабочие места членов летного экипажа и необходимые перегородки позади кресел пилотов вместе с расположенными на них переключателями, АЗС и дополнительными радиопанелями, доступ к которым может потребоваться членам летного экипажа в каких-либо случаях после завершения предполетной подготовки в кабине летного экипажа, также считаются частью кабины летного экипажа и должны точно воспроизводить реальный вертолет
|
|||||||
|
Приборы, панели управления и оборудование кабины летного экипажа:
Перечисленные выше системы должны правильно располагаться, быть функционально точными, имитировать тактильные ощущения, прилагаемые усилия, ход и направление перемещения рычагов управления в правильном диапазоне перемещения и должны точно воспроизводить реальный вертолет
|
+
|
+
|
+
|
На тренажере могут не устанавливаться перегородки, в которых есть только отсеки для хранения чек (штырей) шасси, или на которых размещаются только пожарные топоры или огнетушители, запасные лампы, сумки с документацией. В наличии должны быть все элементы и предметы, которые необходимы для проведения программы подготовки, или их приемлемые копии, но они могут быть перенесены в место, максимально близкое к их реальному положению, в противном случае (когда эти элементы не требуются для программы подготовки) их можно не устанавливать.
|
|||
|
Пожарные топоры и другое аналогичное оборудование могут быть представлены только изображением контуров, фотографиями или аналогичным методом
|
|||||||
|
Имитация окон:
Должны воспроизводиться окна, в том числе в нижней носовой части фюзеляжа, если они есть на вертолете. Остекление должно передавать отражения, характерные для имитируемого вертолета, отражения приборов во время ночного полета, зеркальные отображения
|
+
|
+
|
+
|
Приборы, панели управления и оборудование кабины летного экипажа:
допускается использование воспроизводимых на электронных дисплеях изображений с наложением физических накладок или масок приборов и/или приборных досок тренажера при условии, что:
все компоновки приборов и приборных досок по размерам являются точными копиями компоновок на реальном вертолете, а различия, если они есть, неразличимы для пилота;
приборы, а также их функции в полном объеме, как и встроенные логические схемы, должны быть точными копиями приборов вертолета, воспроизводимые на дисплеях показания приборов характеризуются непрерывностью (отсутствие прерывистости) характеристики отображений приборов точно воспроизводят характеристики моделируемых приборов вертолета, включая разрешающую способность, цвета, подсветку, яркость, шрифты, шаблоны заливок, типы линии и символы
|
|||
|
В соответствующих случаях должно устанавливаться оборудование для управления окнами кабины летного экипажа, но реальные окна не обязательно должны быть функционирующими. Должны воспроизводиться окна в нижней носовой части фюзеляжа, если они имеются на вертолете
|
|||||||
|
Должны воспроизводиться любые вспомогательные детали оконного оборудования и другие части вертолета, попадающие в поле обзора, стеклоочистители, устройство обогрева для предотвращения запотевания, приемники полного давления, рукоятки, кусачки. Допускается воспроизведение их не функционирующих копий, если их использование не предусмотрено программой подготовки
|
|||||||
|
Яркость должна соответствовать необходимым настройкам уровня освещенности
|
|||||||
|
Максимальная яркость должна настраиваться под имитируемые условия освещенности
|
|||||||
|
Закрытая кабина летного экипажа:
Кабина летного экипажа, включая любое оборудованное РМИ или место наблюдателя, должна быть полностью закрытой.
|
Накладки или маски, включая, если применимо, посадочные места приборов и подвижные указатели, являются точной копией приборных панелей вертолета;
|
||||||
|
+
|
+
|
+
|
Ручки управления приборами и переключатели являются точными копиями вертолетных и функционируют точно так же, с приложением таких же усилий, ходом и направлениями, как и на вертолете;
Подсветка приборов точно такая же, как на вертолете и регулируется с помощью таких же ручек управления подсветкой, как и на вертолете. Логика функционирования должна повторять ту, что применяется на вертолете;
Если применимо, приборы имеют лицевые панели, которые точно воспроизводят те, которые есть на вертолете
Изображение на экране дисплея любого трехмерного прибора:
Должны восприниматься как имеющие ту же трехмерную глубину, что и у моделируемого прибора. Внешний вид моделируемого прибора под любым углом должен быть точной копией вертолетного прибора. Любая неточность в показаниях прибора, обусловленная углом зрения и параллаксом, имеющимся в реальном вертолетном приборе, должна точно воспроизводиться в изображении на экране дисплея моделируемого прибора;
Должны воспроизводиться типичные вибрации приборов вертолета, эффект вибрации можно передать с помощью анимации изображения отображаемых приборов, поскольку воспринимаемое отличие от имитируемого вертолета отсутствует
|
||||
|
АЗС:
Все АЗС в кабине летного экипажа должны быть точными копиями АЗС вертолета и должны быть расположены точно так же как в вертолете.
Должны правильно функционировать АЗС, которые влияют на процедуры и/или отображаются на наблюдаемых показаниях приборов в кабине летного экипажа.
Тактильные ощущения, приемы, прилагаемые усилия и направление, необходимые для управления АЗС, должны точно воспроизводить имеющиеся на вертолете
|
|||||||
|
1.1.1.R
|
Кабина летного экипажа (имитируемая часть)
|
+
|
+
|
Кабина летного экипажа (имитируемая часть):
В кабине летного экипажа должно имитироваться все пространство перед поперечным сечением фюзеляжа при самом заднем расположении кресел членов летного экипажа, либо, если применимо, перед поперечным сечением, расположенным непосредственно за креслами дополнительных членов летного экипажа и (или) необходимыми перегородками
|
|||
|
Закрытая или воспринимаемая как закрытая, типовая в пространственном отношении кабина имитируемого вертолета или группы вертолетов и ее конфигурация, включая компоновку приборной доски и такие типовые элементы как: конструктивные перегородки и панели;
основные и вспомогательные рычаги управления полетом, управления двигателем и несущего винта (далее - НВ);
АЗС;
пилотажные приборы;
системы связи, навигационное и другое
аналогичное оборудование;
системы предупреждения и оповещения; все другое оборудование и системы с соответствующими органами управления и видимыми индикаторами в кабине летного экипажа, достаточными для выполнения учебных тренировок
|
|||||||
|
Если тренажер используется для подготовки к полетам по ПВП, он должно быть типовым для группы вертолетов и имитировать конфигурацию (включая компоновку приборной панели и антибликового козырька), сравнимую с реальным вертолетом, используемым для летной подготовки
|
|||||||
|
Приборы, панели управления и оборудование кабины летного экипажа:
Перечисленные выше элементы должны быть правильно расположены, быть функционально точными;
усилия и направление усилий, необходимые для управления ими в правильном диапазоне перемещений, должны быть типовыми для группы вертолетов
|
+
|
+
|
Приборы, панели управления и оборудование кабины летного экипажа:
Допускается воспроизведение на тренажере приборов и/или приборных досок в форме электронных изображений на экране дисплеев с наложением физических накладок или масок, при условии применения функционирующих рычагов управления, являющихся типовыми для имитируемого вертолета Воспроизводимые на дисплеях показания приборов, характеризуются непрерывностью (отсутствие прерывистости)
|
||||
|
Имитация окон:
|
АЗС.
|
||||||
|
Должны воспроизводиться окна, в том числе окна в нижней носовой части фюзеляжа, если они имеются на вертолете
Вспомогательные детали оконного оборудования могут не воспроизводиться
Закрытая кабина летного экипажа:
|
+
|
+
|
Должны воспроизводиться типовые панели АЗС (допускаются фотографические изображения) и их типовое расположение в пространстве. Необходимо моделировать только те АЗС, которые используются при выполнении штатных, нештатных и аварийных процедур. Они моделируются в типовой форме для группы вертолетов и должны правильно функционировать
Закрытая кабина летного экипажа:
|
||||
|
Закрытая кабина летного экипажа должна быть типовой только для имитируемой группы вертолетов.
|
Учитывая требование о наличии типовой кабины летного экипажа только в пространственном отношении, физические размеры закрытой части кабины могут быть такими, чтобы позволять имитировать более чем одну группу вертолетов на реконфигурируемом тренажере. Каждая конфигурация тренажера должна быть типовой для имитируемой группы вертолетов, что может потребовать замены некоторых рычагов управления, приборов, панелей, масок и т.д. при изменении конфигурации
|
||||||
|
Закрытая часть должна простираться до задней стенки кабины летного экипажа и не должна включать РМИ
|
|||||||
|
1.1.1.G
|
Кабина летного экипажа (имитируемая часть):
|
+
|
+
|
Кабина летного экипажа (имитируемая часть):
|
|||
|
Открытая, закрытая или воспринимаемая как закрытая зона кабины летного экипажа с аналогичными, как на вертолете, основными и вспомогательными рычагами управления полетом, рычагами управления двигателем и воздушным винтом; оборудованием, системами, приборами, панелями управления и соответствующими рычагами управления, достаточными для выполнения учебных задач, и смонтированными в пространственной конфигурации, аналогичной группе имитируемых вертолетов
Размещение панелей пилотажных приборов и кресел членов экипажа должно обеспечивать членам экипажа типовые положения тела относительно рычагами управления и типовое расчетное положение глаз
Закрытая кабина летного экипажа:
Открытая, закрытая или воспринимаемая как закрытая зона кабины летного экипажа должна быть похожа на кабину вертолета, типового для группы имитируемых вертолетов. Не должно быть отвлекающих факторов
|
Если тренажер используется для подготовки к полетам по ПВП, необходима имитация антибликового козырька, который обеспечивает типовое расчетное положение глаз пилота, сопоставимое с их положением в реальном вертолете
|
||||||
|
Приборы, панели управления и оборудование кабины летного экипажа:
|
|||||||
|
Смонтированные компоненты должны быть совместимыми и функционировать согласованно
|
|||||||
|
Допускается использование электронных отображений с наложением или без наложения физических накладок или масок. Если во время тренировок от пилота требуются входные воздействия, должны воспроизводиться функционирующие рычаги управления. Воспроизводимые на дисплеях показания приборов характеризуются непрерывностью (отсутствие прерывистости)
Аналогичные, как на вертолете, рычаги управления, приборы и оборудование означают, что они аналогичны используемым на вертолетах, представляющих соответствующую группу имитируемых вертолетов
Если тренажер является реконфигурируемым, некоторые органы управления, приборы или оборудование могут меняться для некоторых конфигураций
Сенсорные экранные панели:
При подготовке по программе оптимизации работы экипажа в кабине сенсорные экранные панели, которые используют оба члена экипажа, должны обеспечивать распознавание нескольких контактов (мультисенсорная панель), что позволяет членам экипажа работать одновременно, на консоли, расположенной между креслами членов экипажа или над головой пилотов
|
|||||||
|
В случае применения закрытой кабины нет необходимости включать в нее РМИ
|
|||||||
|
АЗС:
Должны присутствовать и правильно функционировать только те АЗС, которые используются при выполнении штатных, нештатных и аварийных процедур, и они моделируются в аналогичной имитируемому вертолету форме
|
|||||||
|
1.2
|
РАСПОЛОЖЕНИЕ КРЕСЕЛ
|
||||||
|
1.2.1
|
Расположение кресел членов летного экипажа
|
||||||
|
1.2.1.S
|
Кресла членов летного экипажа должны быть точными копиями кресел имитируемого вертолета
|
+
|
+
|
+
|
Кресла наблюдателей не считаются дополнительными местами в кабине летного экипажа вертолета и их можно не устанавливать
|
||
|
1.2.1.R
|
Кресла членов летного экипажа должны воспроизводить кресла экипажа имитируемого вертолета
Кресла членов летного экипажа должны обеспечивать членам летного экипажа типовое расчетное положение глаз, установленное для группы имитируемых вертолетов
|
+
|
+
|
Кресла наблюдателей не считаются дополнительными местами в кабине членов летного экипажа вертолета и их можно не устанавливать
|
|||
|
1.2.1.G
|
Кресла членов летного экипажа должны обеспечивать членам летного экипажа типовое расчетное положение глаз, при этом допускается корректировку в требуемых пределах, чтобы сидящий в кресле член экипажа мог занять правильное положение относительно рычагов управления, характерное для группы имитируемых вертолетов
|
Кресла наблюдателей не считаются дополнительными местами в кабине членов летного экипажа вертолета и их можно не устанавливать
|
|||||
|
1.2.2
|
Кресла инструкторов и наблюдателей
|
||||||
|
1.2.2.S
|
Кроме кресел членов летного экипажа должны быть одно РМИ и два подходящих кресла для наблюдателя и инспектора уполномоченного органа, расположенных либо в самом тренажере, либо вне его.
В случае размещения кресел на борту тренажера расположение РМИ и хотя бы одного из кресел наблюдателей должно обеспечивать достаточный обзор приборных панелей и лобовых стекол.
В случае расположения кресел вне тренажера у инструктора должна быть возможность наблюдать за действиями экипажа и показаниями приборов, кроме того он должен иметь приемлемое отображение обзора из лобовых стекол, которое соответствует тому, что видит пилот
|
+
|
+
|
+
|
Кресла инструктора и наблюдателей не обязательно должны быть такими же, как кресла членов летного экипажа на реальном вертолете
|
||
|
Для тренажера, оснащенного системой подвижности, все расположенные на борту кресла инструктора и наблюдателей должны быть надлежащим образом закреплены и оборудованы соответствующими ограничительными устройствами, удерживающими сидящих в креслах при любых известных или прогнозируемых перемещениях системы подвижности
|
|||||||
|
Оба кресла наблюдателей должны иметь достаточное хорошее освещение, позволяющее делать записи, и быть оборудованы системой, обеспечивающей ведение выборочного контроля всех переговоров между членами экипажа и инструктором
|
|||||||
|
Обзор через лобовые стекла имитируемой кабины для наблюдателя должен быть таким же, что и для инструктора при условии, что у наблюдателя есть достаточный обзор, и при этом он не мешает инструктору и не отвлекает его
|
|||||||
|
В случае расположения кресел вне тренажера, оба места наблюдателей должны оборудоваться соответствующими средствами для ведения визуального и аудиомониторинга тренировочного процесса (экипаж и инструктор), кроме того у них должна быть возможность вести записи. По крайней мере, на одном из этих мест должно обеспечиваться приемлемое отображение обзора из лобовых стекол, которое соответствует тому, что видит пилот
|
При проведении оценки тренажера возможно рассмотрение вариантов этого требования, исходя из особенностей конфигурации кабины летного экипажа или в зависимости от требований к виду подготовки
|
||||||
|
1.2.2.R
|
Кроме кресел членов летного экипажа должны быть одно РМИ и два подходящих кресла для наблюдателя и инспектора уполномоченного органа.
|
+
|
+
|
Эти кресла необязательно должны быть копиями вертолетных кресел и могут быть обычными офисными креслами, установленными в надлежащем месте.
|
|||
|
1.2.2.G
|
Кроме кресел членов экипажа должно быть предусмотрено одно РМИ и два соответствующих кресла для наблюдателя и инспектора уполномоченного органа
|
||||||
|
1.3
|
ОСВЕЩЕНИЕ
|
||||||
|
1.3.1
|
ОСВЕЩЕНИЕ КАБИНЫ ЛЕТНОГО ЭКИПАЖА
|
||||||
|
1.3.1.S
|
Освещение кабины летного экипажа должно точно воспроизводить освещение кабины вертолета
|
+
|
+
|
+
|
Требуется проведение субъективного испытания
|
||
|
1.3.1.R
|
Условия освещения панелей и приборов должны быть достаточными для заявленного использования
|
+
|
+
|
Могут быть установлены подсвеченные панели и приборы, но это не является обязательным
|
|||
|
1.3.1.G
|
Условия освещения панелей и приборов должны быть достаточными для заявленного использования
|
Могут быть установлены подсвеченные панели и приборы, но это не является обязательным
|
|||||
|
1.3.1
|
ОБЩЕЕ ОСВЕЩЕНИЕ
|
||||||
|
1.3.2.S
|
Общее освещение кабины должно динамически согласовываться с системой визуализации и быть достаточным для заявленного использования
|
+
|
+
|
+
|
Общее освещение должно обеспечивать одинаковый уровень освещенности, который не отвлекает членов летного экипажа
Требуется проведение субъективного испытания
|
||
|
1.3.2.R
|
Общее освещение должно обеспечивать одинаковый уровень освещенности, который не отвлекает членов летного экипажа
|
+
|
+
|
Требуется проведение субъективного испытания
|
|||
|
1.3.2.G
|
Особые требования к общему освещению не предъявляются, но во всех случаях во время тренировок должна обеспечиваться разборчивость показаний приборов
|
Требуется проведение субъективного испытания
|
|||||
2. Модель полета (аэродинамика и двигатель)
|
2.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ МОДЕЛИ ПОЛЕТА
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
2.S
|
Моделирование аэродинамических характеристик и двигателей имитируемого вертолета при висении в зоне и вне зоны влияния земли, включая изменения пространственного положения вертолета, бокового скольжения, высоты, температуры, общей массы, положения центра тяжести и конфигурации в рамках заявленного использования
|
+
|
+
|
+
|
Влияние изменений аэродинамических характеристик при различных сочетаниях воздушной скорости и мощности двигателей, имеющих место в полете, в том числе влияние изменения пространственного положения, аэродинамических и движущих сил и моментов, относительного ветра, температуры, массы, положения центра тяжести и конфигурации Моделирование аэродинамических характеристик с учетом влияния земли, обледенения корпуса и винта (если применимо), эффектов аэродинамической интерференции между потоком от НВ и фюзеляжем, влияния НВ на системы управления и стабилизации, нелинейности за счет бокового скольжения, режима вихревого кольца и срыва потока на отступающей лопасти
|
||
|
2.R
|
Моделирование аэродинамических характеристик и характеристик двигателя должно быть типовым для соответствующей группы имитируемых вертолетов и в соответствии с расчетными характеристиками, влияющими на аэродинамическую модель
|
+
|
+
|
Включает конструкцию и конфигурацию НВ (втулка с качающимися лопастями, жестко закрепленными лопастями, шарнирно закрепленными лопастями, с правильно выбранным направлением вращения НВ), положение центра тяжести массы, высоту и температуру, режим вихревого кольца и срыв потока на отступающей лопасти
|
|||
|
2.G
|
Базовая модель динамики полета (двигателя) группы имитируемых вертолетов в рамках заявленного использования. В ней должно учитываться изменение общей массы и положения центра тяжести
|
Включает влияние земли, набор высоты при наличии поступательной скорости, различие между газотурбинными и поршневыми двигателями
|
|||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ МОДЕЛИ ДИНАМИКИ ПОЛЕТА
|
|||||||
|
2.1
|
МОДЕЛЬ ДИНАМИКИ ПОЛЕТА
|
||||||
|
2.1.S
|
Модель динамики полета, включая моделирование аэродинамических характеристик и двигателя(ей), в которой учтены различные сочетания воздушной скорости и мощности двигателей, обычно встречающиеся в полете, включая влияние изменения пространственного положения вертолета, аэродинамических сил, а также сил и моментов, обусловленных НВ, высоты, температуры, полетной массы, положения центра тяжести и конфигурации
|
+
|
+
|
+
|
|||
|
2.1.R
|
Модель динамики полета, включая моделирование аэродинамических характеристик и двигателя(ей), в которой учтены различные сочетания воздушной скорости и мощности двигателей, обычно встречающиеся в полете, включая влияние изменения пространственного положения вертолета, высоты, температуры, полетной массы, положения центра тяжести и конфигурации
|
+
|
+
|
||||
|
2.1.G
|
Модель динамики полета по аналогии с реальным вертолетом (может быть базовой), включая моделирование аэродинамических характеристик и двигателя(ей), в которой учтены различные сочетания воздушной скорости и мощности двигателей, обычно встречающиеся в полете, включая влияние изменения пространственного положения вертолета, высоты, температуры, полетной массы, положения центра тяжести и конфигурации
|
||||||
|
2.2
|
МОДЕЛЬ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
|
||||||
|
2.2.S.a
|
Моделирование аэродинамических характеристик с учетом эффекта влияния земли осуществляется на основе данных летных испытаний вертолета конкретного типа. Применимые области данных включают выравнивание и посадку с пробегом, а также режим висения в зоне влияния земли.
Приемлемое моделирование эффекта влияния земли включает моделирование КПД НВ, аэродинамического сопротивления фюзеляжа, момента тангажа, балансировок, мощности двигателей в зоне влияния земли, и в переходных режимах при выходе из зоны влияния земли и входе в нее
|
+
|
+
|
+
|
В качестве основы для летно-технических характеристик требуются данные летных испытаний
|
||
|
2.2.S.b
|
Моделирование аэродинамических характеристик, с учетом влияния обледенения на фюзеляж, на аэродинамические характеристики НВ и на двигатель (если применимо). Помимо общего увеличения лобового сопротивления или общей массы вертолета, что приводит к изменению потребной мощности, модели обледенения должны имитировать эффекты ухудшения аэродинамических характеристик при нарастании льда на несущих поверхностях винта, включая потерю КПД, влияние на величину тяги, изменение моментов тангажа и крена, ухудшение эффективности управления и изменения усилий на рычагах управления
|
+
|
+
|
+
|
|||
|
2.2.S.c
|
Моделирование аэродинамических характеристик с учетом интерференции между потоком от НВ и фюзеляжем, влияния НВ на системы управления и стабилизации и воспроизведение нелинейных эффектов, обусловленных боковым скольжением, режимом вихревого кольца и срывом потока на отступающей лопасти
|
+
|
+
|
+
|
|||
|
2.2.R
|
Аналогичная реальному вертолету аэродинамическая модель вертолета, созданная на основе данных соответствующей группы вертолетов в рамках заявленного использования и включающая эффекты влияния земли, обледенения фюзеляжа и НВ (если применимо), аэродинамической интерференции между потоком от НВ и фюзеляжем, влияния НВ на системы управления и стабилизации, а также воспроизводящая нелинейные эффекты, обусловленные боковым скольжением, режимом вихревого кольца и срывом потока на отступающей лопасти
|
+
|
+
|
Основой для летно-технических характеристик должны служить данные летных испытаний, адаптированных с учетом типовой группы вертолетов
|
|||
|
2.2.G
|
Аналогичная реальному вертолету аэродинамическая модель вертолета в рамках заявленного использования, которая может включать эффекты влияния земли, аэродинамической интерференции между потоком от НВ и фюзеляжем, влияния НВ на системы управления и стабилизации, а также воспроизводящая нелинейные эффекты, обусловленные скольжением
|
Аэродинамические данные необязательно должны основываться на данных летных испытаний
|
|||||
|
2.3
|
МАССОВЫЕ ХАРАКТЕРИСТИКИ
|
||||||
|
2.3.S
|
В рамках заявленного использования должна применяться аналогичная реальному вертолету конкретного типа модель массовых характеристик вертолета, включая полетную массу, положение центра тяжести и моменты инерции в зависимости от полезной нагрузки и заправки топливом
|
+
|
+
|
+
|
|||
|
2.3.R
|
В рамках заявленного использования должна применяться аналогичная реальному вертолету типовая модель массовых характеристик вертолета, включая полетную массу, положение центра тяжести и моменты инерции в зависимости от полезной нагрузки и заправки топливом
|
+
|
+
|
||||
|
2.3.G
|
В рамках заявленного использования должна применяться аналогичная реальному вертолету базовая модель массовых характеристик вертолета, включая полетную массу, положение центра тяжести и моменты инерции в зависимости от полезной нагрузки и заправки топливом
|
||||||
3. Управление вертолетом при движении на земле
|
3.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ЭФФЕКТОВ ВЛИЯНИЯ ЗЕМЛИ И ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ НА ЗЕМЛЕ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
3.S
|
Характеристики управляемости на земле включают:
Влияние земли. Реакция вертолета при контакте с поверхностью земли при посадке, включая обжатие стоек шасси, трение пневматиков или лыжных шасси, боковые силы и другие соответствующие параметры, такие как вес и скорость, необходимые для определения режима полета и конфигурации
|
+
|
+
|
+
|
Динамика при отказе тормозной системы и повреждениях пневматиков, а также снижение эффективности тормозной системы должны соответствовать моделируемому вертолету. Усилия на рычагах управления при торможении и управлении по курсу, при выполнении вертолетом посадки с пробегом для различных состояний посадочной поверхности на основании данных реального вертолета должны соответствовать всем внешним условиям
|
||
|
Характеристики при рулении по земле. Управляющие воздействия, включая торможение, радиус разворота при торможении и влияние бокового ветра
|
|||||||
|
Модель должна включать обжатие стоек шасси, трение пневматиков (лыжных шасси), боковые силы, эффекты окружающей обстановки и другие необходимые параметры. Имитируются влажные, сухие, мягкие, твердые и покрытые льдом поверхности для нормальной посадки, посадки на наклонную поверхность и на воду
|
|||||||
|
3.R
|
Типовые для группы вертолетов эффекты влияния земли
|
Приемы рулевого управления/торможения, типовые для группы вертолетов. Не обязательно должны точно соответствовать типу вертолета
|
|||||
|
3.G
|
Базовая модель управляемости на земле. Аналогичные реальному вертолету характеристики, не связанные с конкретной моделью, типом или вариантом вертолета
|
+
|
+
|
Должно проводиться различие между колесным и лыжным (полозковым) шасси
|
|||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ЭФФЕКТОВ ВЛИЯНИЯ ЗЕМЛИ И ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ
|
|||||||
|
3.1
|
ЭФФЕКТЫ ВЛИЯНИЯ ЗЕМЛИ И ХАРАКТЕРИСТИКИ УПРАВЛЯЕМОСТИ
|
||||||
|
3.1.S
|
Моделирование характеристик управляемости на земле, включая следующие:
Влияние земли.
Реакция вертолета при контакте с поверхностью земли во время посадки, включая обжатие стоек шасси, трение пневматиков или лыжных шасси, боковые силы и другие соответствующие параметры, как вес и скорость, необходимые для определения режима полета и конфигурации, но, не ограничиваясь этим;
|
+
|
+
|
+
|
Требуется заявление о соответствии (ЗОС). Требуется проведение испытаний
|
||
|
Характеристики управляемости при рулении по земле. Управляющие воздействия, включая торможение, снижение скорости, радиус разворота и влияние бокового ветра
|
|||||||
|
3.1.R
|
Моделирование характеристик управляемости на земле, типовое для вертолета или группы вертолетов, которое не должно соответствовать конкретному вертолету
|
Требуется ЗОС. Требуется проведение испытаний
|
|||||
|
Влияние земли
|
|||||||
|
Реакция вертолета при контакте с поверхностью земли во время посадки, включая обжатие стоек шасси, трение пневматиков или лыжных шасси, боковые силы и другие соответствующие параметры, как вес и скорость, необходимые для определения режима полета и конфигурации, но, не ограничиваясь этим
|
|||||||
|
Характеристики управляемости при рулении по земле. Управляющие воздействия, включая торможение, снижение скорости, радиус разворота и влияние бокового ветра
|
|||||||
|
3.1.G
|
Базовые модель влияния земли и характеристики управляемости на земле, аналогичные реальному вертолету, но не связанные с конкретной моделью, типом или вариантом вертолета
|
+
|
+
|
||||
|
3.2
|
СОСТОЯНИЕ ПОСАДОЧНОЙ ПОВЕРХНОСТИ
|
||||||
|
3.2.S
|
Усилия на рычагах управления, связанные с торможением и путевым управлением, как минимум, для перечисленных ниже состояний посадочной поверхности при выполнении вертолетом взлета и посадки с пробегом, определенные на основе данных вертолета, и при условии, что они соответствуют области применения вертолета и его конфигурации:
1) сухая;
2) влажная (мягкая и твердая поверхность);
3) покрытая льдом;
4) частично влажная;
5) частично покрытая льдом;
6) наклонная ВПП
|
+
|
+
|
+
|
Требуется ЗОС. Требуется проведение экспертных испытаний
|
||
|
3.2.R
|
Усилия на рычагах управления, связанные с торможением и путевым управлением должны быть типовыми, по меньшей мере, для перечисленных ниже состояний ВПП, и определяться на основе данных вертолета при выполнении посадки с пробегом:
1) сухая;
2) влажная
|
||||||
|
3.2.G
|
Усилия на рычагах управления, связанные с торможением и путевым управлением для сухой посадочной поверхности
|
+
|
+
|
||||
|
3.3
|
ОТКАЗ ТОРМОЗОВ И РАЗРУШЕНИЕ ПНЕВМАТИКОВ
|
||||||
|
3.3.S
|
Динамические характеристики при отказах тормозов и разрушении пневматиков и снижение эффективности тормозов вследствие нагрева тормозных колодок, если это применимо
|
+
|
+
|
+
|
Требуется ЗОС.
|
||
|
3.3.R, G
|
Требования не предъявляются
|
+
|
+
|
||||
4. Системы вертолета
|
4.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК СИСТЕМ ВЕРТОЛЕТА
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
4.S
|
Системы тренажера должны моделироваться для конкретного типа вертолета и с уровнем функциональности, позволяющем летному экипажу выполнять действия в штатных аварийных и особых условиях, связанных с выполнением учебной задачи
|
+
|
+
|
+
|
Системы связи, навигационное оборудование, а также системы предупреждения и аварийной сигнализации (в том числе звуковая аварийная сигнализация и другие звуковые сигналы, передающиеся в наушники) должны соответствовать оборудованию имитируемого вертолета.
Должны функционировать все АЗС, необходимые для выполнения полетов
|
||
|
Должны присутствовать система технического зрения с расширенными возможностями визуализации и очки ночного видения, если они необходимы для заявленного использования
|
|||||||
|
На тренажере должны быть все рычаги управления, с помощью которых инструктор может управлять необходимыми переменными в системах, а также создавать все особые или аварийные условия в моделируемых системах вертолета, как это определено в утвержденной учебной программе или в соответствующем летном руководстве
|
|||||||
|
4.R
|
Системы должны быть типовыми для группы имитируемых вертолетов и воспроизводиться с уровнем функциональности, достаточным для обеспечения действий летного экипажа в рамках заявленного использования
|
+
|
+
|
Системы связи, навигационное оборудование, а также системы предупреждения и аварийной сигнализации (в том числе звуковая аварийная сигнализация и другие звуковые сигналы, передающиеся в наушники)
|
|||
|
На тренажере должны быть все органы управления, с помощью которых инструктор может управлять необходимыми переменными в системах, а также создавать все особые или аварийные условия в моделируемых системах вертолета, как это определено в утвержденной учебной программе или в соответствующем летном руководстве.
|
|||||||
|
4.G
|
Системы должны быть аналогичными вертолетным, но могут не относиться к конкретной модели или типу вертолета и воспроизводиться с уровнем функциональности, достаточным для обеспечения действий летного экипажа в рамках заявленного использования
|
Системы связи, а также звуковые сигналы, передающиеся в наушники, в рамках заявленного использования.
Функционирование систем должно обеспечить выполнение всех базовых эксплуатационных процедур, а также имитацию отказов, включая отказы приборов
|
|||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК СИСТЕМ ВЕРТОЛЕТА
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
||||||
|
4.1
|
ФУНКЦИОНИРОВАНИЕ СИСТЕМ В ШТАТНЫХ, НЕШТАТНЫХ И АВАРИЙНЫХ СИТУАЦИЯХ
|
||||||
|
4.1.S
|
Все системы вертолета, воспроизводимые на тренажере, должны имитировать работу систем вертолета конкретного типа, включая взаимодействие систем, как на земле, так и в полете
|
+
|
+
|
+
|
Работа систем вертолета должна определяться и прослеживаться на основе данных, предоставляемых изготовителем вертолета, изготовителем комплектного оборудования, либо на основе альтернативных утвержденных данных для систем вертолета или их компонентов (руководств по эксплуатации систем)
|
||
|
Системы должны функционировать в объеме, достаточном для выполнения действий в нормальных, нештатных и аварийных ситуациях
|
|||||||
|
После включения систем их надлежащее функционирование должно регулироваться членом экипажа и не требовать дополнительных команд с РМИ
|
|||||||
|
Очки ночного видения и EFVS должны имитироваться в тех случаях, когда они есть на вертолете или когда являются частью учебной программы
|
|||||||
|
4.1.R
|
Системы вертолета, воспроизводимые на тренажере, должны имитировать работу систем вертолета, включая взаимодействие систем, как на земле, так и в полете
|
+
|
+
|
Работа систем вертолета должна определяться и прослеживаться на основе данных, предоставляемых изготовителем вертолета, изготовителем комплектного оборудования, либо на основе альтернативных утвержденных данных для систем вертолета или их компонентов, они не должны быть связаны с конкретным типом вертолета. После включения систем их надлежащее функционирование должно регулироваться членом экипажа и не требовать дополнительных команд с РМИ
|
|||
|
Системы должны функционировать в объеме, достаточном для выполнения действий в нормальных, нештатных и аварийных ситуациях, предусмотренных в учебных программах
|
|||||||
|
4.1.G
|
Системы должны функционировать в объеме, достаточном для выполнения действий в нормальных, нештатных и аварийных ситуациях в соответствии с требованиями учебной программы
|
После включения систем их надлежащее функционирование должно регулироваться членом экипажа и не требовать дополнительных команд с РМИ
|
|||||
|
4.2
|
ПОКАЗАНИЯ ПРИБОРОВ
|
||||||
|
4.2.S
|
Все соответствующие показания приборов должны автоматически реагировать на изменения пространственного положения вертолета, входные воздействия пилота или изменения в состоянии систем, а также на любые внешние воздействия, связанные с моделируемыми приборами или показаниями (атмосферные возмущения; эффекты, возникающие в результате обледенения; радионавигация или GPS)
|
+
|
+
|
+
|
Численные значения должны быть представлены в соответствующих единицах
|
||
|
4.2.R
|
Все соответствующие показания приборов, связанные с имитируемым вертолетом или группой имитируемых вертолетов, должны автоматически реагировать на изменения пространственного положения вертолета, входные воздействия пилота или изменения состояния системы, а также на атмосферные возмущения и эффекты, возникающие в результате обледенения
|
+
|
+
|
Численные значения должны быть представлены в соответствующих единицах
|
|||
|
4.2.G
|
Все соответствующие показания приборов, связанные с имитируемым вертолетом или группой имитируемых вертолетов, должны автоматически реагировать на изменения пространственного положения вертолета, входные воздействия пилота или изменения состояния системы
|
||||||
|
4.3
|
СИСТЕМЫ СВЯЗИ НАВИГАЦИОННЫЕ СИСТЕМЫ, СИСТЕМЫ ПРЕДУПРЕЖДАЮЩЕЙ И АВАРИЙНОЙ СИГНАЛИЗАЦИИ
|
||||||
|
4.3.S
|
Системы связи, навигационное оборудование, а также системы предупреждающей и аварийной сигнализации (включая аудиопредупреждения и другие звуковые сигналы, передающиеся в наушники), соответствующие оборудованию, установленному на вертолете конкретного типа, должны функционировать в пределах допусков и эксплуатационных характеристик, установленных для применяемого бортового оборудования
|
+
|
+
|
+
|
Рабочие характеристики включают любые конкретные характеристики моделируемого оборудования тренажера, (зависимости между двумя или более моделируемыми системами в случае неисправностей или специальные эксплуатационные ограничения оборудования общего назначения в результате интеграции в имитируемый тип вертолета)
|
||
|
4.3.R
|
Системы связи, навигационное оборудование, а также системы предупреждающей и аварийной сигнализации (включая звуковые предупреждения и другие звуковые сигналы, передающиеся в наушники), соответствующие системам, обычно устанавливаемым на имитируемом вертолете или группе вертолетов, должны функционировать в пределах допусков, установленных для применяемого бортового оборудования
|
+
|
+
|
||||
|
4.3.G
|
Системы связи и звуковые сигналы, передающиеся в наушники, должны функционировать в рамках заявленного использования
|
||||||
|
4.4
|
ПРОТИВООБЛЕДЕНИТЕЛЬНЫЕ СИСТЕМЫ
|
||||||
|
4.4.S
|
Противообледенительные системы, соответствующие системам, установленным на вертолете конкретного типа, должны функционировать и создавать соответствующие эффекты, формирующиеся в результате обледенения фюзеляжа, двигателей и датчиков приборов.
|
+
|
+
|
+
|
|||
|
4.4.R
|
Противообледенительные системы, соответствующие обычно устанавливаемым системам на имитируемом вертолете или группе вертолетов, должны функционировать
|
+
|
+
|
Необходимо использовать упрощенные модели обледенения с соответствующим изменением летных характеристик в результате обледенения фюзеляжа, двигателя, воздухозаборника и системы приемников воздушного давления. Должны воспроизводиться эффекты в результате включения противообледенительных систем постоянного и переменного действия
|
|||
|
4.4.G
|
Требования не предъявляются
|
||||||
5. Рычаги управления полетом и усилия на них
|
5.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК РЫЧАГОВ УПРАВЛЕНИЯ И УСИЛИЙ НА НИХ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
5.S
|
Усилия на рычаги управления и перемещения рычагов управления должны точно соответствовать аналогичным усилиям и перемещениям на имитируемом вертолете.
Реакция рычагов управления должна быть такой же, как на реальном вертолете в тех же условиях полета.
При перемещениях рычагов управления должны воспроизводиться те же эффекты, что и на реальном вертолете в тех же условиях полета.
Динамические характеристики системы загрузки на рычагах управления должны точно соответствовать имитируемому вертолету
|
+
|
+
|
+
|
|||
|
5.R
|
Характеристики рычагов управления должны быть типовыми для группы имитируемых вертолетов, но не должны относиться к вертолету конкретного типа
|
+
|
+
|
усилия на рычагах управления авиационного тренажера, отражающие усилия на реальном воздушном судне на любом этапе полета в нормальных, нештатных и аварийных условиях эксплуатации (далее - активная обратная связь по усилию) требуется в соответствующих случаях (не требуется, если она не присутствует на вертолете, при наличии электродистанционной системы управления рулями)
|
|||
|
5.G
|
Характеристики рычагов управления должны воспроизводиться по аналогии с характеристиками вертолета, но не относящиеся к определенной модели, типу или группы вертолетов
|
Активная обратная связь по усилию не является необходимой
|
|||||
|
5.1
|
УСИЛИЯ НА РЫЧАГИ УПРАВЛЕНИЯ И ПЕРЕМЕЩЕНИЕ РЫЧАГОВ УПРАВЛЕНИЯ
|
Испытание положений рычагов управления в зависимости от усилий не проводится, если усилия в тренажере воспроизводятся исключительно с помощью вертолетного оборудования
|
|||||
|
5.1.S
|
Усилия на рычаги управления и их перемещения должны соответствовать имитируемому вертолету конкретного типа. Реакция на управляющие усилия и перемещения рычагов управления должно быть точно таким, как и на имитируемом вертолете, и при этом должны возникать те же эффекты, что и на реальном вертолете при тех же условиях полета и состоянии систем
|
+
|
+
|
+
|
Активная обратная связь по усилию требуется, если она предусмотрена в системе вертолета
|
||
|
5.1.R
|
Усилия на рычаги управления и их перемещения должны соответствовать группе имитируемых вертолетов.
Реагирование на управляющие усилия и перемещения рычагов управления должно соответствовать имитируемому вертолету и группе вертолетов и при этом должны возникать те же эффекты, что и на реальном вертолете или группе вертолетов при тех же условиях полета и состоянии систем
|
+
|
+
|
Активная обратная связь по усилию требуется, если она предусмотрена в системе вертолета
|
|||
|
5.1.G
|
Усилия на рычаги управления, их перемещения и реагирование на управляющие усилия должны, в общем, соответствовать группе имитируемых вертолетов
|
Активная обратная связь по усилию не требуется. Усилия на рычаги управления, производимые при их пассивном положении, являются приемлемыми
|
|||||
|
5.2
|
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВОСПРИЯТИЯ УСИЛИЙ НА РЫЧАГИ УПРАВЛЕНИЯ
|
||||||
|
5.2.S
|
Динамические характеристики усилий на рычаги управления должны быть точно такими же, как и на имитируемом вертолете
|
+
|
+
|
+
|
|||
|
5.2.R
|
Требования не предъявляются
|
||||||
|
5.2.G
|
Требования не предъявляются
|
||||||
|
5.3
|
РАБОТА СИСТЕМЫ УПРАВЛЕНИЯ
|
||||||
|
5.3.S
|
Системы управления должны точно имитировать работу систем вертолета в нормальном режиме и во всех нештатных режимах, включая резервные системы, а также воспроизводить отказы соответствующих систем.
Должны воспроизводиться соответствующие показания приборов и сообщения в кабине летного экипажа
|
+
|
+
|
+
|
|||
|
5.3.R
|
Системы управления должны точно имитировать работу систем группы вертолетов в нормальном режиме и во всех нештатных режимах, включая резервные системы, а также воспроизводить отказы соответствующих систем. Должны воспроизводиться соответствующие показания приборов и сообщения в кабине летного экипажа
|
+
|
+
|
||||
|
5.3.G
|
Системы управления должны обеспечивать базовую эксплуатацию вертолета с соответствующей индикацией в кабине летного экипажа
|
||||||
6. Акустические эффекты
|
6.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК АКУСТИЧЕСКИХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
Звукоакустическая модель ВС, формируется из 2 библиотек - звуковая референсная библиотека и проверочная метрологическая библиотека. Библиотеки, входящих в состав утвержденного набора звуковых данных, созданных производителем ВС или уполномоченной организацией.
Данные библиотеки входят в общий пакет набора исходных данных типа ВС
|
|||||||
|
Референсная библиотека - звуковые файлы, отражающие работу основных узлов, агрегатов и систем в диапазоне частот 30 Гц - 16 кГц, представленных в цифровом формате
|
|||||||
|
В референсной библиотеке файлы должны быть представлены в одном из цифровых "моно" аудиоформатов, без сжатия, с частотой дискретизации не менее 44,1 КГц. Все звуковые файлы должны быть нормализованы по выходному значению (- 3дБ)
|
|||||||
|
Проверочная контрольная библиотека - зарегистрированные шумомером - анализатором спектра в контрольных точках уровни звукового давления в третьоктавных полосах частот для основных (длительных стационарных) режимов полета ВС
|
|||||||
|
Проверочная контрольная библиотека должна быть сформирована в процессе измерений звукового давления в стационарных режимах полета ВС
|
|||||||
|
6.S
|
Моделированию подлежат шумы и звуки от двигателя, и других систем и агрегатов вертолета и окружающей обстановки, воспринимаемые летным экипажем во время выполнения полетов
|
+
|
+
|
||||
|
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 20 Гц - 18 кГц, соответствующих по звуковому давлению и спектральному составу
|
|||||||
|
6.R
|
Моделированию подлежат шумы и звуки от двигателя, и других систем и агрегатов вертолета и окружающей обстановки, воспринимаемые летным экипажем во время выполнения полетов.
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 80 Гц - 12 кГц, соответствующих по звуковому давлению и спектральному составу
|
+
|
|||||
|
6.G
|
Моделированию подлежат значительные шумы и звуки, воспринимаемые летным экипажем во время выполнения полетов.
Библиотеки звуковой модели ВС, должны быть сформированы из библиотеки, входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 150 Гц - 10 кГц, соответствующих по звуковому давлению и спектральному составу
|
+
|
+
|
||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК АКУСТИЧЕСКИХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
||
|
6.1
|
СИСТЕМА ИМИТАЦИИ ЗВУКОВ
|
||||||
|
6.1.S
|
Программно-аппаратный комплекс приема, обработки, конвертации цифровых значений и воспроизведения в практически диффузное акустическое поле в объеме тренажера
|
+
|
+
|
Требуется ЗОС
|
|||
|
Сформированное акустическое поле должно быть в практическом соответствии с параметрами акустического поля кабины ВС (физический параметр уровень звукового давления, дБ), сформированных в нормальных условиях полета, на заданных режимах полета. Соответствие определяется третьоктавными спектрами звукового давления в диапазоне частот 20 - 20000 Гц и уровнями звука A, шумов, соответствующих различным режимам полета ВС (зарегистрированных и входящих в состав утвержденного набора звуковых данных), и соответствующих данных проверочной контрольной библиотеки
|
|||||||
|
6.1.R
|
Программно-аппаратный комплекс приема, передачи, обработки, конвертации цифровых значений и воспроизведения в практически диффузное акустическое поле в объеме тренажера
|
+
|
Требуется ЗОС
|
||||
|
Сформированное акустическое поле должно быть в практическом соответствии с параметрами акустического поля кабины ВС (физический параметр уровень звукового давления, дБ), сформированных в нормальных условиях полета на заданных режимах полета. Соответствие определяется третьоктавными спектрами звукового давления в диапазоне частот 20 - 20000 Гц и уровнями звука A, шумов, соответствующих различным режимам полета ВС (зарегистрированных и входящих в состав утвержденного набора звуковых данных), и соответствующих данных проверочной контрольной библиотеки
|
|||||||
|
6.1.G
|
Программно-аппаратный комплекс приема и передачи, обработки, конвертации цифровых значений и воспроизведения в практически диффузное акустическое поле в объеме тренажера
|
+
|
+
|
Требуется ЗОС
|
|||
|
Сформированное акустическое поле должно быть в практическом соответствии с параметрами акустического поля кабины ВС (физический параметр уровень звукового давления), сформированных в нормальных условиях полета на заданных режимах полета. Соответствие определяется третьоктавными спектрами звукового давления в диапазоне частот 20 - 20000 Гц и уровнями звука A, шумов, соответствующих различным режимам полета ВС (зарегистрированных и входящих в состав утвержденного набора звуковых данных), и соответствующих данных проверочной контрольной библиотеки
|
|||||||
|
6.2
|
ШУМЫ И ЗВУКИ В РЕЗУЛЬТАТЕ УДАРА ПРИ АВАРИИ ИЛИ КАТАСТРОФЕ
|
||||||
|
6.2.S
|
Шумы и звуки в результате удара при аварии, когда превышаются установленные для моделируемого вертолета ограничения
|
+
|
+
|
В случае неполной библиотеки утвержденного набора звуковых данных, должна быть произведена дополнительная регистрация и звуковая запись необходимых для формирования звуковой модели звуков непосредственно в ходе полета ВС. Полученные данные измерений и звуковая информация, в последующем, должны быть обработаны и сведены в самостоятельные библиотеки звуковых и проверочных (контрольных) данных. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля
|
|||
|
Библиотеки звуковой модели ВС должны быть сформированы из библиотеки входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 80 Гц - 18 кГц и соответствующих спектральному составу и амплитуде заданных значений
|
|||||||
|
6.2.R
|
Шумы и звуки в результате удара при аварии, когда превышаются установленные для моделируемого вертолета ограничения
|
+
|
В случае неполной библиотеки утвержденного набора звуковых данных, должна быть произведена дополнительная регистрация и звуковая запись необходимых для формирования звуковой модели звуков непосредственно в ходе полета ВС. Полученные данные измерений и звуковая информация, в последующем, должны быть обработаны и сведены в самостоятельные библиотеки звуковых и проверочных (контрольных) данных. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля
|
||||
|
Библиотеки звуковой модели ВС должны быть сформированы из библиотеки входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 150 Гц - 12 кГц и соответствующих спектральному составу и амплитуде заданных значений
|
|||||||
|
6.2.G
|
Шумы и звуки в результате удара при аварии, когда превышаются установленные для моделируемого вертолета ограничения
|
+
|
+
|
В случае неполной библиотеки утвержденного набора звуковых данных, звуковые данные могут быть синтезированы искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля
|
|||
|
Библиотеки звуковой модели ВС должны быть сформированы из библиотеки входящих в состав утвержденного набора звуковых данных, создающих звуковой образ работы основных узлов, агрегатов и систем, в диапазоне частот 150 Гц - 10 кГц и соответствующих амплитуде заданных значений
|
|||||||
|
6.3
|
ШУМЫ И ЗВУКИ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ
|
||||||
|
6.3.S
|
Значительные шумы и звуки окружающей обстановки должны соответствовать моделируемым метеоусловиям.
|
+
|
+
|
Шумы и звуковые данные синтезируются искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля
|
|||
|
Акустическая модель должна отражать влияние земли и атмосферы на уровень звукового давления (изменения скорости звука при изменении свойств атмосферы и отражающие свойства земной и водной поверхности)
|
|||||||
|
6.3.R
|
Характерные звуки и шумы окружающей обстановки должны соответствовать моделируемым метеоусловиям
|
+
|
Шумы и звуковые данные синтезируются искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля. Акустическая модель должна отражать влияние земли на уровень звукового давления (отражающие свойства земной и водной поверхности)
|
||||
|
6.3.G
|
Имитация звуков и шумов окружающей обстановки не требуется
|
+
|
+
|
Шумы и звуковые данные синтезируются искусственно посредством редакционных программных средств. Последние каталогизируются для синтезирования в параметрической и временной форме, в рамках звукового модуля
|
|||
|
Однако в случае наличия звуков и шумов, они должны соответствовать моделируемым метеоусловиям
|
|||||||
|
6.4
|
УРОВНИ ГРОМКОСТИ ЗВУКОВ И ШУМОВ
|
||||||
|
6.4.S
|
Уровень громкости звука, должен соответствовать фактическому уровню громкости, указанному в утвержденном наборе звуковых данных и графику кривых равной громкости (изофонами). Они представляют собой графики стандартизированных зависимостей уровня звукового давления от частоты при заданном уровне громкости. С помощью этой диаграммы можно определить уровень громкости чистого тона какой-либо частоты, зная уровень создаваемого им звукового давления
|
+
|
+
|
Должно предусматриваться выдача сигнализации на основной странице рабочего места инструктора РМИ, которое всегда видна инструктору
|
|||
|
Регулятор громкости должен иметь возможность автоматического и программного изменения и корректировки уровня громкости звука, по алгоритму изофонов, с соответствующей индикацией
|
|||||||
|
6.4.R
|
Уровень громкости звука должен соответствовать фактическому уровню громкости, указанному в утвержденном наборе звуковых данных и графику кривых равной громкости (изофонами). Они представляют собой графики стандартизированных зависимостей уровня звукового давления от частоты при заданном уровне громкости. С помощью этой диаграммы можно определить уровень громкости чистого тона какой-либо частоты, зная уровень создаваемого им звукового давления
|
+
|
Должно предусматриваться выдача сигнализации на основной странице рабочего места инструктора РМИ, которое всегда видна инструктору
|
||||
|
Регулятор громкости должен иметь возможность автоматического и программного изменения и корректировки уровня громкости звука, по алгоритму изофонов, с соответствующей индикацией
|
|||||||
|
6.4.G
|
Уровень громкости звука, должен соответствовать фактическому уровню громкости, указанному в утвержденном наборе звуковых данных и графику кривых равной громкости (изофонами). Они представляют собой графики стандартизированных зависимостей уровня звукового давления от частоты при заданном уровне громкости. С помощью этой диаграммы можно определить уровень громкости чистого тона какой-либо частоты, зная уровень создаваемого им звукового давления
|
+
|
+
|
Должно предусматриваться выдача сигнализации на основной странице рабочего места инструктора РМИ, которое всегда видна инструктору
Регулятор громкости должен иметь возможность автоматического и программного изменения и корректировки уровня громкости звука, по алгоритму изофонов, с соответствующей индикацией
|
|||
|
6.5
|
НАПРАВЛЕННОСТЬ ЗВУКА
|
||||||
|
6.5.S
|
Звуковые банки должны автоматически панорамировать сигналы по расположению звуковых источников многоканальной (6 и более каналов) звуковоспроизводящей системы. Локализация источников звука в кабине тренажера, должна осуществляться с учетом направления распространения звука от основных источников ВС, без нарушения визуального восприятия рабочего пространства кабины членами экипажа
|
+
|
+
|
Требуется ЗОС.
|
|||
|
Используется многоканальная система воспроизведения от 6-и каналов и более
|
|||||||
|
Локализация источника звука должна быть не хуже 15° в горизонтальной плоскости и не хуже 30° в вертикальной плоскости
|
|||||||
|
6.5.R
|
Звуковые банки должны автоматически панорамировать сигналы по расположению звуковых источников многоканальной (4 и более каналов) звуковоспроизводящей системы
|
+
|
Используется многоканальная система воспроизведения от 4-х каналов и более. Локализация источника звука должна быть не хуже 20° в горизонтальной плоскости и не хуже 40° в вертикальной плоскости
|
||||
|
Локализация источников звука в кабине тренажера, должна осуществляться с учетом направления распространения звука от основных источников ВС, без нарушения визуального восприятия рабочего пространства кабины членами экипажа
|
|||||||
|
6.5.G
|
Звуковые банки должны автоматически панорамировать сигналы по расположению звуковых источников многоканальной (2 и более каналов) звуковоспроизводящей системы
|
+
|
+
|
Используется многоканальная система воспроизведения и усиления от 2 каналов и более. Локализация источника звука должна быть не хуже 30° в горизонтальной плоскости, в вертикальной плоскости требования не устанавливаются
|
|||
|
Локализация источников звука в кабине тренажера, должна осуществляться с учетом направления распространения звука от основных источников ВС, без нарушения визуального восприятия рабочего пространства кабины членами экипажа
|
|||||||
|
6.6.S
|
Звуковые банки должны включать в себя характерные звуки от вибрации при движениях, бафтинг (тряска) и толчки, которые возникают при эксплуатации самолета, в той степени, в какой они отражают что-либо происходящее с самолетом или состояние самолета и могут ощущаться в кабине пилота (летного экипажа)
|
+
|
+
|
+
|
Использование в многоканальной системе воспроизведения от 6 каналов и более, специального канала акселерационных сигналов
|
||
|
Воспроизведение звуковой модели, в соответствие с пунктами 8.1 - 8.4 выдаваемыми сигналами акселерационных данных системы подвижности и генераторов вибрации
|
|||||||
|
Звуковые банки моделируются в соответствии с эффектами движения
|
|||||||
|
Уровень звукового сигнала, входящего в ПИД, должен соответствовать величине и спектру вибраций по осям x, y и z, чтобы корректно воспроизводились эффекты движения, ощущаемые на самолете или вертолете
|
|||||||
|
6.6.R
|
Звуковые банки должны включать в себя характерные звуки от вибрации при движениях, бафтинг (тряска) и толчки, которые возникают при эксплуатации самолета, в той степени, в какой они отражают что-либо происходящее с самолетом или состояние самолета и могут ощущаться в кабине пилота (летного экипажа)
|
+
|
+
|
+
|
Использование в многоканальной системе воспроизведения от 4 каналов и более, специального канала акселерационных сигналов
|
||
|
Воспроизведение звуковой модели, в соответствие с выдаваемыми сигналами акселерационных данных системы подвижности и генераторов вибрации. Звуковые банки моделируются в соответствии с эффектами движения Уровень звукового сигнала, входящего в ПИД, должен соответствовать величине и спектру вибраций по осям x, y и z, чтобы корректно воспроизводились эффекты движения, ощущаемые на самолете или вертолете
|
|||||||
|
6.7
|
ВИЗУАЛЬНО ЗВУКОВЫЕ ЭФФЕКТЫ
|
||||||
|
6.7.S
|
Звуковые банки должны включать в себя характерные звуки от воспроизводимой визуальной обстановки:
засветка от молнии (гроза), аэродромное движение ВС, различной техники, работающих людей, механизмов и объектов
|
Уровень звукового сигнала должен соответствовать звуковому давлению и спектру звуков, зарегистрированных в кабине ВС и входящих в ПИД
|
|||||
7. Визуальные эффекты
|
7.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК ВИЗУАЛЬНЫХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
7.S
|
В рамках заявленного использования тренажера конкретного вертолета для каждого из пилотов имитируется непрерывная зона обзора, с эффектом бесконечной перспективы для точки положения глаз пилота, управляющего полетом, с детальным отображением ближней перспективы и текстурированным воспроизведением всех условий окружающей среды.
Должны моделироваться визуальные ориентиры, позволяющие оценить скорость изменения высоты, высоту над уровнем земли, поступательные перемещения и скорости при выполнении взлета, при маневрировании на малой высоте/с низкой скоростью, в режиме висения и при выполнении посадки
|
+
|
+
|
+
|
+
|
Зона обзора в тренажере должна в точности соответствовать зоне обзора имитируемого вертолета. В некоторых случаях, когда это необходимо для выполнения учебных задач, обеспечивается расширенная зона обзора, включая обзор из окон передней носовой части кабины.
|
|
|
Минимальная зона обзора:
210° по горизонтали и 60° по вертикали
|
|||||||
|
Вертикальное исходное положение глаз пилотов корректируется таким образом, чтобы соотношение верхней и нижней частей зоны обзора составляло, соответственно 1/3 и 2/3
|
|||||||
|
Точность воспроизведения визуальной обстановки, на визуальном отображении различим горизонт в дневное и вечернее время при выполнении полетов по ПВП, что позволяет определить положение вертолета по осям тангажа, крена и рыскания. Возможности системы должны обеспечивать отображение рельефа местности с разрешающей способностью, определяемой окружающей обстановкой. Место посадки должно быть видно с расстояния, достаточного для того, чтобы пилот мог установить режим снижения, стабилизировать вертолет и выдерживать угол захода на посадку до 45° с высоты от 300 м над уровнем земли до ее поверхности, если видимость не ограничивается конструкцией кабины вертолета. Должна обеспечиваться высокая четкость и разборчивость при обзоре поверхности земли и наземных объектов
|
|||||||
|
7.R
|
Должны присутствовать визуальные эффекты, позволяющие оценить скорость изменения высоты, поступательные перемещения и скорость при выполнении взлета и посадки
|
||||||
|
Минимальная зона обзора: 180° по горизонтали и 45° по вертикали. Вертикальное исходное положение глаз пилотов корректируется таким образом, чтобы соотношение нижней и верхней зоны обзора составляло, соответственно 1/3 и 2/3
|
|||||||
|
Точность воспроизведения визуальной обстановки: на визуальном отображении должен быть различим горизонт в дневное и вечернее время в условиях выполнения полетов по ПВП, что позволяет определить положение вертолета по осям тангажа, крена и рыскания. Посадочная площадка должна быть видна с расстояния, достаточного для того, чтобы позволить пилоту установить режим снижения, стабилизировать вертолет и выдерживать угол захода на посадку до 20° с высоты от 300 м над уровнем земли до ее поверхности, если зона обзора не ограничивается конструкцией кабины вертолета
|
|||||||
|
Должна обеспечиваться высокая четкость и разборчивость при обзоре поверхности земли и наземных объектов.
|
|||||||
|
7.G
|
Минимальная зона обзора: 45° по горизонтали и 30° по вертикали
|
+
|
|||||
|
Отображение визуальной обстановки в дневное время, в сумерках или на рассвете должно отвечать требованиям к проведению подготовки к полетам по приборам, а это предполагает наличие возможности достаточно подробно воспроизвести элементы обстановки, что обеспечивает распознавание базовых аэродромов, вертолетных площадок, местности и наземных ориентиров в зоне конечного этапа захода на посадку и взлета, а также возможность успешного выполнения маневров с низкой воздушной скоростью и на малой высоте, включая отрыв от земли, висение, поступательные перемещения, выполнение касания и посадки
|
|||||||
|
Точность воспроизведения визуальной обстановки: на визуальном отображении должен быть различим горизонт в дневное и вечернее время в условиях выполнения полетов по ПВП, что позволяет определить положение вертолета по осям тангажа и крена. При наличии посадочной площадки, она должна быть видна с расстояния, достаточного для того, чтобы позволить пилоту установить режим снижения, стабилизировать вертолет и выдерживать малый угол захода на посадку (менее 5°) с высоты от 300 м над уровнем земли до ее поверхности, если зона обзора не ограничивается конструкцией кабины вертолета
|
|||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ВИЗУАЛЬНЫХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
|
7.1
|
ДИСПЛЕЙ
|
Распределение горизонтальной и вертикальной зон обзора может быть скорректировано с учетом конфигурации имитируемого вертолета
|
|||||
|
Ограничение зоны обзора в 20° может быть увеличено до 24° в тех случаях, когда это обосновано практическими соображениями
|
|||||||
|
7.1.S
|
Для каждого пилота одновременно должна обеспечиваться непрерывная зона обзора, как минимум, 210° по горизонтали и 60° по вертикали
|
+
|
+
|
+
|
+
|
Требуется ЗОС, объясняющее геометрические параметры установки
|
|
|
На поверхности дисплея допускаются стыки, если это необходимо для обеспечения транспортировки тренажера, однако они должны быть минимизированы
|
|||||||
|
Отображение должно быть выровнено относительно пилота, выполняющего полет. Смещение отображения, наблюдаемого вторым пилотом, не должно превышать 20°
|
|||||||
|
Вертикальная зона обзора должна распределяться таким образом, чтобы обзор выше линии горизонта составлял 20°, ниже линии горизонта 40°
Если движение законцовок лопастей винта видно пилоту из реального вертолета это должно соответствующим образом отображаться и на тренажере
|
|||||||
|
В системе визуализации не должно быть оптических разрывов и дефектов отображения, создающих нереалистичные эффекты
|
|||||||
|
7.1.R
|
Для каждого пилота одновременно должна обеспечиваться непрерывная зона обзора, как минимум, 180° по горизонтали и 45 по вертикали
|
Требуется ЗОС, объясняющее геометрические параметры установки
|
|||||
|
На поверхности экрана допускаются стыки, если это необходимо для обеспечения транспортировки тренажера, однако они должны быть минимизированы
|
|||||||
|
Отображение должно быть выровнено относительно пилота, выполняющего полет. Смещение отображения, наблюдаемого вторым пилотом, не должно превышать 20°.
|
|||||||
|
Вертикальное поле обзора должно распределяться таким образом, чтобы обзор выше линии горизонта составлял 15°, ниже линии горизонта 30°
Если движение законцовок лопастей винта видно пилоту из реального вертолета это должно соответствующим образом отображаться и на тренажере
|
|||||||
|
Система визуализации не должна иметь оптических разрывов и дефектов изображения, создающих нереалистичные эффекты
|
|||||||
|
7.1.G
|
Для каждого пилота одновременно должно обеспечиваться непрерывная зона обзора, как минимум, 45° по горизонтали и 30° по вертикали
|
+
|
|||||
|
Отображение должно быть выровнено относительно пилота, выполняющего полет. Смещение отображения, наблюдаемого вторым пилотом, не должно превышать 20°
|
|||||||
|
Если движение законцовок лопастей винта видно пилоту из реального вертолета это должно соответствующим образом отображаться и на тренажере
|
|||||||
|
Минимальное расстояние от положения глаз пилота до поверхности дисплея прямого наблюдения не может быть меньше, чем расстояние до любого прибора, расположенного на передней панели
|
|||||||
|
7.2
|
РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ ДИСПЛЕЯ
|
||||||
|
7.2.S
|
Разрешающая способность демонстрируется с помощью тестового шаблона, состоящего из объектов, видимые угловые размеры которых, отсчитываемые от точки положения глаз пилота, не превышают 2 угловых минут на визуальном изображении на дисплее
|
+
|
+
|
+
|
+
|
Требуется ЗОС с расчетами, подтверждающими разрешающую способность
|
|
|
7.2.R
|
Разрешающая способность демонстрируется с помощью тестового шаблона, состоящего из объектов, видимые угловые размеры которых, отсчитываемые от точки положения глаз пилота, не превышают 3 угловых минут на визуальном изображении на дисплее
|
Требуется ЗОС с расчетами, подтверждающими разрешающую способность
|
|||||
|
7.2.G
|
Разрешающая способность демонстрируется с помощью тестового шаблона, состоящего из объектов, видимые угловые размеры которых, отсчитываемые от точки положения глаз пилота, не превышают 4 угловых минут на визуальном изображении на дисплее
|
+
|
Требуется ЗОС с расчетами, подтверждающими разрешающую способность.
|
||||
|
7.3
|
РАЗМЕР ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА
|
||||||
|
7.3.S
|
Размер точечного источника света - не более 5 угловых минут
|
+
|
+
|
+
|
+
|
Требуется ЗОС, подтверждающее, что в тестовом шаблоне представлены огни, используемые для освещения аэродрома.
|
|
|
7.3.R, G
|
Размер точечного источника света - не более 8 угловых минут
|
+
|
Требуется ЗОС, подтверждающее, что в тестовом шаблоне представлены огни, используемые для освещения аэродрома
|
||||
|
7.4
|
КОЭФФИЦИЕНТ КОНТРАСТНОСТИ ПОВЕРХНОСТИ
|
||||||
|
7.4.S
|
Коэффициент контрастности поверхности, позволяющий четко распознавать элементы изображения, не менее 8:1
|
+
|
+
|
+
|
+
|
||
|
7.4.G
|
Коэффициент контрастности поверхности, достаточный для заявленного использования, не менее 4:1
|
+
|
|||||
|
7.5
|
КОЭФФИЦИЕНТ КОНТРАСТНОСТИ ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА
|
||||||
|
7.5.S
|
Коэффициент контрастности точечного источника света, достаточный для четкого распознавания источников освещения и света, не менее 25:1
|
+
|
+
|
+
|
+
|
||
|
7.5.R
|
Коэффициент контрастности точечного источника света, достаточный для распознавания света, не менее 10:1
|
||||||
|
7.5.G
|
Коэффициент контрастности точечного источника света, достаточный для распознавания огней, не менее 8:1
|
+
|
|||||
|
7.6
|
ЯРКОСТЬ СИСТЕМЫ
|
||||||
|
7.6.S
|
Яркость системы должна демонстрироваться с использованием тестового растрового шаблона, растянутого по экрану, и должна быть достаточной для отображения обычной дневной обстановки, а также отвечать требованиям к коэффициенту контрастности.
Яркость поверхности должна быть не менее 20 кд/м2 (5,8 фут-ламберт)
|
+
|
+
|
+
|
+
|
||
|
7.6.R
|
Яркость системы должна демонстрироваться с использованием тестового растрового шаблона, растянутого по экрану, и должна быть достаточной для отображения обычной дневной обстановки, а также отвечать требованиям к коэффициенту контрастности. Яркость поверхности должна быть не менее 14 кд/м2 (4,1 фут-ламберт)
|
||||||
|
7.6.G
|
Достаточная яркость для обеспечения заявленного использования
|
+
|
|||||
|
7.7
|
УРОВЕНЬ ЧЕРНОГО И ПОСЛЕДОВАТЕЛЬНАЯ КОНТРАСТНОСТЬ
|
Должно представляться объяснение в тех случаях, если испытание не считается относящимся к типу дисплея
|
|||||
|
7.7.S, R
|
Уровень черного и последовательная контрастность должны измеряться с целью определения того, что они достаточны для проведения обучения в любое время суток.
|
+
|
+
|
+
|
+
|
||
|
7.7.G
|
Достаточные для обеспечения заявленного использования
|
+
|
|||||
|
7.8
|
РАЗМЫТОСТЬ ИЗОБРАЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ
|
Должно представляться объяснение в тех случаях, если испытание не считается относящимся к типу дисплея
|
|||||
|
7.8.S
|
Необходимо проводить испытания для определения степени размытости изображения движущихся объектов, характерной для некоторых типов дисплеев. Должно проводиться испытание, демонстрирующее степень размытости изображения движущихся объектов при заданной скорости движения изображения
|
+
|
+
|
+
|
+
|
||
|
7.8.R, G
|
Подходящая для обеспечения заявленного использования.
|
+
|
|||||
|
7.9
|
СПЕКЛ-ТЕСТ
|
Должно представляться объяснение в тех случаях, если испытание не считается относящимся к типу дисплея.
Это испытание относится только к проекторам, в которых используются источники света с некоторой степенью когерентности
|
|||||
|
7.9.S
|
Необходимо провести испытание для определения, что уровень спекла, типичный для лазерных дисплеев, ниже отвлекающего уровня
|
+
|
+
|
+
|
+
|
||
|
7.9.R, G
|
Подходящий уровень спекла для обеспечения заявленного использования
|
+
|
|||||
|
7.10
|
ИНДИКАЦИЯ НА ЛОБОВОМ СТЕКЛЕ (если имеется)
|
Включает устройство, укрепляемое на голове или другое устройство, отображающее данные поверх изображения обстановки, видимой из окна кабины пилотов
|
|||||
|
7.10.S
|
Система индикации на лобовом стекле должна быть аналогичной установленной в кабине летного экипажа имитируемого вертолета.
Активный дисплей (дублирующий индикатор) для отображения всех параметров в кабине пилотов, должен размещаться на РМИ или в другом месте. Формат параметров, представляемых на дублирующем индикаторе, должен соответствовать формату отображения параметров на индикаторе пилота
|
+
|
+
|
+
|
+
|
Требуется ЗОС
|
|
|
В случае использования неколлимированных систем, пилот, выполняющий полет, может использовать только одно изображение, которое выровнено с отображениями внекабинной обстановки
|
|||||||
|
7.10.R
|
Система индикации на лобовом стекле должна быть аналогичной установленной в кабине летного экипажа имитируемого вертолета, либо данные могут быть представлены на дисплее отображения внекабинной обстановки
|
Требуется ЗОС
|
|||||
|
При использовании неколлимированных систем, пилот, выполняющий полет, может использовать только одно изображение, которое выровнено с отображениями внекабинной обстановки
|
|||||||
|
Если отображаются данные об обстановке за окном кабины летного экипажа, которые накладываются на визуальную картину, изображение данных должно регулироваться пилотом, поскольку таким образом это происходит на вертолете и это применимо только для полетов, выполняемых одним пилотом
|
|||||||
|
Активный дисплей (дублирующий индикатор) для отображения всех параметров в кабине пилота, должен размещаться на РМИ или в другом месте. Формат параметров, представляемых на дублирующем индикаторе, должен соответствовать формату отображения параметров на индикаторе пилота
|
|||||||
|
7.10.G
|
Требования не предъявляются.
|
||||||
|
7.11
|
EFVS (если установлена), включая очки ночного видения
|
||||||
|
7.11.S
|
Аппаратное и программное обеспечение имитации EFVS (включая соответствующие индикаторы и систему сигнализации в кабине пилотов) должны функционировать аналогично системе EFVS, установленной на имитируемом вертолете
|
+
|
+
|
+
|
+
|
При использовании неколлимированных систем пилот, выполняющий полет, может использовать только одну EFVS вследствие проблем с выравниванием изображения
|
|
|
Для функционирования EFVS должен моделироваться как минимум один аэропорт. Модель аэропорта должна включать систему приборам ILS и выполнение неточного заход на посадку с использованием системы VNAV, если она необходима для вертолета данного типа)
|
|||||||
|
Для настройки минимумов EFVS должна обеспечиваться возможность предварительной настройки метеоусловий с РМИ
|
|||||||
|
7.11.R
|
Аппаратное и программное обеспечение имитации EFVS (включая соответствующие индикаторы и систему сигнализации в кабине пилотов) должны функционировать аналогично системе EFVS, установленной на имитируемом вертолете
|
Пилот, выполняющий полет, может использовать только одну EFVS/систему индикации на лобовом стекле вследствие проблем с выравниванием изображения. В качестве альтернативы EFVS может быть представлена как часть отображения визуальной картины, представляющей типичную зону обзора при индикации на лобовом стекле
|
|||||
|
Для функционирования EFVS должен моделироваться как минимум один аэропорт. Модель аэропорта должна включать ILS и выполнение неточного захода на посадку с использованием VNAV, если она необходима для вертолета данного типа
|
|||||||
|
7.11.G
|
Требования не предъявляются
|
||||||
|
7.12
|
ВИДИМЫЙ УЧАСТОК ЗЕМЛИ
|
||||||
|
7.12.S, R
|
Необходимо провести испытание, чтобы продемонстрировать правильность восприятия видимого участка земли на конечном этапе захода на посадку в условиях категории II и правильность положения вертолета относительно ВПП
|
+
|
+
|
+
|
+
|
||
|
7.12.G
|
Необходимо продемонстрировать пригодную видимость
|
+
|
|||||
|
7.13
|
ЭФФЕКТЫ, ОБУСЛОВЛЕННЫЕ НИСХОДЯЩИМ ПОТОКОМ ОТ ЛОПАСТЕЙ НВ
|
||||||
|
7.13.S
|
Система должна обеспечивать возможность отображения эффектов циркулирующей пыли, водяного пара или снега, развивающиеся вследствие нисходящего потока от НВ.
Этот эффект должен соответствовать типу поверхности, находящейся под вертолетом
|
+
|
+
|
+
|
+
|
||
|
7.13.R, G
|
Требования не предъявляются.
|
||||||
8. Вибрационные эффекты
|
8.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК ВИБРАЦИОННЫХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
8.S
|
Должны воспроизводиться характерные вибрации (тряска), соответствующие типу вертолета, которые возникают в процессе его эксплуатации и могут ощущаться в кабине летного экипажа
|
+
|
+
|
Адекватность воспроизведения эффектов должна включать все эффекты уровня R согласно п. 8.R, но для конкретного типа вертолета, а также такие дополнительные эффекты, связанные с состоянием шасси, нагружением в результате крутящего момента НВ и хвостового винта и эффекты конкретных неисправностей (в том числе связанные с демпфером НВ, системой подавления колебаний и устройствами компенсации крутящего момента, подшипников, муфт, редукторов, ведущего вала НВ)
|
|||
|
8.R
|
Пилот должен воспринимать ощутимые и типовые вибрационные эффекты.
|
+
|
Адекватность воспроизведения эффектов должна включать все эффекты уровня G и дополнительные вибрационные эффекты основной системы уравновешивания реактивного момента НВ (хвостовой винт, фенестрон, система NOTAR), а также эффекты, вызванные балансировкой и установкой соосности системы противовращения и НВ, отказами гидросистемы и обледенением, попаданием в режим вихревого кольца, авторотацией и основные эффекты отказов системы уравновешивания реактивного момента НВ. Должны также воспроизводиться эффекты, вызванные эксплуатацией в условиях низкой относительной скорости, и условия высокой относительной скорости. Все эффекты должны соответствовать группе вертолетов
|
||||
|
8.G
|
Пилот воспринимает похожие на вертолетные вибрационные эффекты
|
+
|
+
|
Основные типы вибраций, имеющие место на вертолете, в том числе вследствие скорости вращения НВ, нагрузки на диск, набора высоты при переходе от висения к поступательному полету, изменения скорости (ускорение и торможение), а также общие вибрационные эффекты в нештатном режиме
|
|||
|
8.1
|
ОБЩИЕ ВИБРАЦИОННЫЕ ЭФФЕКТЫ
|
||||||
|
8.1.S
|
Должны воспроизводиться характерные эффекты тряски/вибрации, возникающие в результате эксплуатации вертолета, которые могут ощущаться в кабине летного экипажа.
На тренажере должны быть запрограммированы следующие эффекты вибрации и тряски:
основные вибрационные эффекты от скорости НВ и нагрузки на диск;
тряска при переходе к поступательному полету и вследствие изменений скорости;
тряска при движении по ВПП, от обжатия стоек шасси, вследствие скорости движения по земле и неровностей ВПП;
тряска, вызванная влиянием поперечных потоков;
тряска при выпуске и уборке шасси (если применимо);
тряска при срыве потока с отступающей лопасти;
тряска, вызванная вихревым кольцом (стабилизация тягой);
типовые эффекты при касании с землей; вибрации вследствие высокой скорости НВ;
тряска вследствие динамики разрыва пневматика;
тряска вследствие неисправностей и повреждения двигателя;
тряска вследствие контакта корпуса вертолета с землей;
вибрация вследствие атмосферных возмущений;
вибрация вследствие обледенения,
а также любые эффекты вибрации и тряски, характерные для НВ и системы трансмиссии имитируемого типа вертолета
|
+
|
+
|
Требуется ЗОС
Требуется проведение испытаний вибраций при движении и регистрация их результатов для сравнения относительных амплитуд в зависимости от частоты. Имитатор должен быть запрограммирован и оборудован приборами таким образом, чтобы можно было измерить характерные режимы тряски и сравнить их с данными, полученными при испытаниях вертолета
|
|||
|
Для случаев турбулентности приемлемы универсальные модели возмущений, если при их использовании они позволяют получить результаты, сопоставимые с доказательными данными летных испытаний
|
|||||||
|
8.1.R
|
На тренажере должны быть запрограммированы следующие эффекты вибрации и тряски:
основные вибрационные эффекты от скорости НВ и нагрузки на диск;
тряска при переходе к поступательному полету и вследствие изменений скорости;
тряска, вызванная влиянием поперечных потоков;
тряска при срыве потока с отступающей лопасти;
тряска, вызванная вихревым кольцом (стабилизация тягой);
вибрации вследствие высокой скорости НВ;
тряска вследствие неисправностей и повреждения двигателя;
тряска вследствие контакта корпуса вертолета с землей;
вибрация вследствие атмосферных возмущений;
вибрации вследствие обледенения
|
+
|
Требуется проведение испытаний вибраций при движении и регистрация их результатов для сравнения относительных амплитуд в зависимости от частоты.
Имитатор должен быть запрограммирован и оборудован приборами таким образом, чтобы можно было измерить характерные режимы тряски и сравнить их с данными, полученными при испытаниях вертолета
|
||||
|
8.1.G
|
Тренажер должен быть оборудован системой воспроизведения характерных для вертолета вибраций, ощущаемых на рабочих местах пилотов; должны быть запрограммированы следующие эффекты вибрации и тряски:
основные вибрационные эффекты от скорости НВ и нагрузки на диск;
тряска при переходе к поступательному полету и вследствие изменений скорости;
тряска вследствие нештатного состояния систем
|
+
|
+
|
||||
9. Акселерационные эффекты
|
9.
|
ОБЩИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК АКСЕЛЕРАЦИОННЫХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
9.R
|
Пилот должен воспринимать ощутимые и характерные акселерационные эффекты и воздействия, которые обеспечивают соответствующее восприятие ускорений на вертолете по 6 степеням свободы
|
+
|
|||||
|
9.R1
|
Пилот должен воспринимать ощутимые и характерные акселерационные эффекты и воздействия, которые обеспечивают соответствующее восприятие ускорений на вертолете по 6 степеням свободы
|
+
|
|||||
|
Ощущение движений могут быть менее отчетливыми, чем указанные в пункте 9.R, сила воздействия движений может быть ниже
|
|||||||
|
9.G
|
Требования не предъявляются.
|
||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ХАРАКТЕРИСТИК АКСЕЛЕРАЦИОННЫХ ЭФФЕКТОВ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
||
|
9.1
|
ОБЩИЕ СВЕДЕНИЯ ОБ АКСЕЛЕРАЦИОННЫХ ЭФФЕКТАХ
|
Когда системы подвижности устанавливаются эксплуатантом тренажера, должна проходиться оценка, для подтверждения, что их установка отрицательно не повлияет на уровень тренажера, даже если для данного типа тренажера система подвижности не требуется, но она может применяться для дополнительных видов подготовки
|
|||||
|
9.1.R
|
Воспринимаемые пилотом акселерационные эффекты (силовые воздействия) по 6 степеням свободы, должны быть типовыми реакциями имитируемого вертолета при движении по земле и в полете
|
+
|
Требуется ЗОС
|
||||
|
9.1.R1
|
Воспринимаемые пилотом акселерационные эффекты (силовые воздействия) по 6 степеням свободы, должны быть типовыми для моделируемого вертолета движениями в полете и на земле
|
+
|
Требуется ЗОС
|
||||
|
9.2
|
СИЛОВЫЕ ВОЗДЕЙСТВИЯ ПРИ ДВИЖЕНИИ
|
||||||
|
9.2.R
|
Система подвижности должна воспроизводить эффекты, воспринимаемые пилотом по 6 степеням свободы по тангажу, крену, рысканию, перемещениям по вертикальной, поперечной и продольной осям
|
+
|
Требуется ЗОС
|
||||
|
9.2.R1
|
Система подвижности должна воспроизводить эффекты, воспринимаемые пилотом по 6 степеням свободы (по тангажу, крену, рысканию, перемещениям вдоль вертикальной, поперечной и продольной осям).
Интенсивность воспроизводимых эффектов может быть частично уменьшена и восприятие движения может быть снижено
|
+
|
Требуется ЗОС
|
||||
|
9.3
|
ЭФФЕКТЫ ДВИЖЕНИЯ
|
||||||
|
9.3.R
|
Эффекты движения должны включать характерные виды тряски и толчки, возникающие в процессе эксплуатации вертолета, поскольку они отражают перемещения или состояние вертолета, которые могут ощущаться в кабине летного экипажа
|
+
|
|||||
|
1) Эффекты касания основными или носовым шасси или лыжными шасси в зависимости от их геометрии;
|
+
|
Толчки при касании должны отражать эффекты поперечного и продольного движения в процессе посадки с боковым отклонением или при боковом ветре, а также влияние вертикальной скорости снижения. Необходимо выполнить несколько заходов на посадку по обычной схеме с различными вертикальными скоростями снижения. Следует удостовериться, что эффекты толчков при касании для каждого значения вертикальной скорости снижения являются типовыми для имитируемого вертолета
|
|||||
|
2) Динамические характеристики разрыва пневматика;
(Моделирование разрыва одного и нескольких пневматиков)
|
+
|
Пилот может заметить рыскание при моделировании разрыва нескольких пневматиков с одной стороны. В связи с этим ему потребуется работать педалью, чтобы сохранить управление вертолетом. В зависимости от типа вертолета, разрыв одного пневматика может остаться незамеченным пилотом и не вызвать каких-либо особых эффектов движения. Звуки или вибрация могут быть связаны с падением давления в реальном пневматике
|
|||||
|
3) Удар корпуса вертолета о землю (удары хвостовой частью и гондолой)
Удары хвостовой частью можно проверить путем большого увеличения угла тангажа при быстрой остановке или посадки на авторотации
|
+
|
Эффект движения должен ощущаться как заметный момент на пикирование
|
|||||
|
9.3.R1
|
Эффекты движения должны включать характерные виды тряски и толчки, возникающие в процессе эксплуатации вертолета, поскольку они отражают перемещения или состояние вертолета, которые могут ощущаться в кабине пилотов
|
+
|
|||||
|
9.3.R1
|
1) Эффекты касания основными или носовым шасси или лыжными шасси в зависимости от их геометрии
|
+
|
Толчки при касании должны отражать влияние поперечного и путевого движения в результате посадки с боковым отклонением или при боковом ветре, также как и влияние вертикальной скорости снижения. Необходимо выполнить несколько заходов на посадку по обычной схеме при различных вертикальных скоростях снижения. Следует удостовериться, что эффекты толчков при касании для каждого значения вертикальной скорости снижения являются типовыми для реального вертолета
|
||||
|
2) Динамические характеристики разрыва пневматика
|
+
|
Пилот может заметить рыскание при моделировании разрыва нескольких пневматиков с одной стороны. В связи с этим ему потребуется работать педалью, чтобы сохранить управление вертолетом. В зависимости от типа вертолета, разрыв одного пневматика может остаться незамеченным пилотом и не вызвать каких-то особых эффектов движения. Звук или вибрация могут быть связаны с падением давления в реальном пневматике
|
|||||
|
Моделирование разрыва одного и нескольких пневматиков.
|
|||||||
|
3) Удар корпуса вертолета о землю (удары хвостовой частью и гондолой). Удары хвостовой частью можно проверить путем большого увеличения угла тангажа при быстрой остановке или посадке на авторотации
|
+
|
Эффект движения должен ощущаться как заметный момент на пикирование
|
|||||
10. Навигация
|
10.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ НАВИГАЦИОННЫХ УСЛОВИЙ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
10.S
|
Для обеспечения заявленного использования необходимы навигационные данные наряду с соответствующим оборудованием для захода на посадку (GPS, VOR, DME, ILS, ненаправленный радиомаяк)
|
+
|
+
|
+
|
+
|
+
|
Навигационные средства должны соответствовать реальным и использоваться без ограничений в пределах дальности действия, кроме тех случаев, когда дальность действия намеренно уменьшена из-за препятствий на земле или каких-либо других помех
|
|
10.R, G
|
Требования не предъявляются
|
||||||
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ НАВИГАЦИОННЫХ УСЛОВИЙ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
||
|
10.1
|
БАЗА НАВИГАЦИОННЫХ ДАННЫХ
|
||||||
|
10.1.S
|
База навигационных данных, достаточная для обеспечения работы систем имитируемого вертолета в реальных условиях эксплуатации
|
+
|
+
|
+
|
+
|
+
|
|
|
10.2
|
МИНИМАЛЬНЫЕ ТРЕБОВАНИЯ К АЭРОПОРТУ/ВЕРТОДРОМУ
|
||||||
|
10.2.S
|
Полная база навигационных данных, как минимум, одного аэропорта или вертодрома, включая регулярные обновления.
|
+
|
+
|
+
|
+
|
+
|
Регулярные обновления проводятся в сроки обновления базы навигационных данных.
В тех случаях, когда в аэропортах или на вертодромах могут выполняться заходы на посадку с использованием системы GPS, это должно обеспечиваться, если вертолет оборудован соответствующим образом
|
|
10.3
|
ОРГАНЫ УПРАВЛЕНИЯ НА РМИ
|
||||||
|
10.3.S
|
Инструктор управляет внутренними и внешними навигационными средствами
|
+
|
+
|
+
|
+
|
+
|
|
|
10.4
|
ХАРАКТЕРИСТИКИ ПРИЛЕТА/ВЫЛЕТА
|
||||||
|
10.4.S
|
Навигационные данные со всеми соответствующими стандартными процедурами прилета и вылета
|
+
|
+
|
+
|
+
|
+
|
|
|
10.5
|
ДАЛЬНОСТЬ ДЕЙСТВИЯ НАВИГАЦИОННЫХ СРЕДСТВ
|
||||||
|
10.5.S
|
Навигационные данные вместе со всеми соответствующими стандартами процедур прибытия и отправления
|
+
|
+
|
+
|
+
|
+
|
Навигационные средства должны соответствовать реальным и использоваться без ограничений в пределах дальности действия, кроме тех случаев, когда дальность действия намеренно уменьшена из-за препятствий на земле или каких-либо других помех
|
11. Метеоусловия
|
11.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ МЕТЕОУСЛОВИЙ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
|
|
11.S
|
В соответствии с учебной задачей
|
+
|
+
|
+
|
Эффекты атмосферных явлений могут включать следующие (но не ограничиваться только этими):
1) арктический туман;
2) нисходящие воздушные потоки;
3) эффект влияния гор (завихрения, демаркационные линии);
4) турбулентность в результате выбрасываемых буровой установкой газов;
5) изменение ветра за счет зданий, деревьев;
6) эффекты турбулентности и ветра, вызванные профилем местности и строениями,
7) вихревой спутный след и скос потоков от других ВС;
8) сдвиг ветра
|
||
|
11.R
|
Для обеспечения заявленного использования необходимо обеспечивать полностью интегрированное динамическое моделирование окружающих условий, включая типовые атмосферные и погодные явления
|
+
|
Включая характеристики поверхности (движение травы, поверхности моря)
|
||||
|
Моделирование окружающей обстановки должно включать грозы, турбулентность, микропорывы, а также соответствующие типы осадков
|
|||||||
|
11.G
|
Для обеспечения заявленного использования, необходимы базовая модель атмосферы, давление, температура, видимость, нижняя кромка облачности и ветер
|
+
|
|||||
|
Окружающие условия должны быть синхронизированы с соответствующими характеристиками вертолета и моделируемыми характеристиками в целях обеспечения целостности
|
|||||||
|
11.1
|
СТАНДАРТНАЯ АТМОСФЕРА
|
||||||
|
11.1.S
|
Моделирование стандартной атмосферы, включая возможность управления основными параметрами с РМИ
|
+
|
+
|
+
|
|||
|
Для обеспечения заявленного использования должны моделироваться и другие атмосферные явления
|
|||||||
|
11.1.R, G
|
Моделирование стандартной типовой атмосферы, включая возможность управления основными параметрами с РМИ
|
+
|
+
|
||||
|
11.2
|
СДВИГ ВЕТРА
|
||||||
|
11.2.S
|
В тренажере должны использоваться модели сдвига ветра
|
+
|
Требуется проведение субъективного испытания
|
||||
|
11.2.R, G
|
Требования не предъявляются
|
||||||
|
11.3
|
АТМОСФЕРНОЕ ВЛИЯНИЕ
|
||||||
|
11.3.S
|
Должен обеспечиваться плавный переход между различными метеорологическими эффектами
Должны моделироваться следующие эффекты, наблюдаемые в системе визуализации. Также должно обеспечиваться управление ими с РМИ:
1) многочисленные слои облачности с регулируемыми высотами нижней и верхней кромок, метеозоны наблюдения неба и рваные облака;
|
Требуется проведение субъективного испытания
Целью данной функции является демонстрация перехода от визуальных метеорологических условий к приборным метеорологическим условиям
|
|||||
|
+
|
+
|
+
|
|||||
|
+
|
+
|
+
|
|||||
|
2) включение и (или) выключение грозовых фронтов;
|
+
|
+
|
+
|
Требуется проведение объективного испытания
|
|||
|
3) видимость и дальность видимости на ВПП, включая эффекты однородного и неоднородного тумана;
|
+
|
+
|
+
|
||||
|
4) эффект воздействия на вертолет его собственного внешнего освещения;
|
+
|
+
|
+
|
||||
|
5) эффекты освещения аэропорта или вертодрома, включая изменение интенсивности освещения и эффект тумана;
|
+
|
+
|
+
|
||||
|
6) загрязнение поверхности (включая эффекты порывов ветра и потоков воздуха от несущего винта/рециркуляции);
|
+
|
+
|
+
|
||||
|
7) влияние переменных осадков (дождь, град, снег);
|
+
|
+
|
+
|
||||
|
8) эффект восприятия скорости внутри облака;
|
+
|
+
|
+
|
||||
|
9) постепенное изменение видимости при входе в облако и выходе из него.
|
|||||||
|
11.3.R
|
Должен обеспечиваться плавный переход между метеорологическими эффектами
|
Требуется проведение субъективного испытания
|
|||||
|
Должны моделироваться следующие эффекты, наблюдаемые в системе визуализации. Также должно обеспечиваться управление ими с РМИ:
|
+
|
Целью данной функции является демонстрация перехода от визуальных метеорологических условий к приборным метеорологическим условиям
|
|||||
|
1) многочисленные слои облачности с регулируемыми высотами нижней и верхней кромок, метеозоны наблюдения неба и рваные облака;
|
+
|
||||||
|
2) включение и (или) выключение грозовых фронтов;
|
+
|
||||||
|
3) видимость и дальность видимости на ВПП, включая эффекты тумана;
|
+
|
Требуется проведение объективного испытания
|
|||||
|
4) эффект воздействия на вертолет его собственного внешнего освещения;
|
+
|
||||||
|
5) загрязнение поверхности и эффекты порывов ветра и потоков воздуха от вертолета (рециркуляции);
|
+
|
||||||
|
6) влияние осадков (дождь, град, снег);
|
+
|
||||||
|
7) постепенное изменение видимости при входе в облако и выходе из него
|
|||||||
|
11.3 G
|
Должен обеспечиваться плавный переход между метеорологическими эффектами
|
Требуется проведение субъективного испытания
|
|||||
|
Должны моделироваться следующие эффекты, наблюдаемые в системе визуализации. Также должно обеспечиваться управление ими с РМИ:
|
Целью данной функции является демонстрация перехода от визуальных метеорологических приборным метеорологическим условиям
|
||||||
|
1) слои облачности с регулируемыми высотами нижней и верхней кромок облачности;
|
+
|
||||||
|
2) видимость и дальность видимости на ВПП
|
+
|
||||||
|
11.4
|
ОРГАНЫ УПРАВЛЕНИЯ НА РМИ
|
||||||
|
11.4.S
|
Должны моделироваться следующие характеристики, а также обеспечиваться управление ими с РМИ:
|
Требуется проведение субъективного испытания
В тех случаях, когда это требуется для выполнения специальных учебных задач, следует также включать эффекты:
нисходящие воздушные потоки;
эффект влияния гор (завихрения, демаркационные линии)
|
|||||
|
1) скорость и направление приземного ветра, а также порывы ветра;
|
+
|
+
|
+
|
||||
|
2) скорость и направление ветра на средней и большой высоте;
|
+
|
+
|
+
|
В тех случаях, когда это требуется для выполнения специальных учебных задач, следует также включать эффекты:
вихревой спутный след и потоки воздуха от другого ВС
|
|||
|
3) грозы и микропорывы;
|
+
|
+
|
+
|
||||
|
4) турбулентность;
|
+
|
+
|
+
|
||||
|
5) сдвиг ветра
|
+
|
+
|
+
|
В тех случаях, когда это требуется для выполнения специальных учебных задач, следует также включать эффекты:
турбулентность в результате выбрасываемых буровой установкой газов;
изменение ветра за счет зданий, деревьев;
эффекты турбулентности и ветра, вызванные профилем местности и строениями
|
|||
|
В тех случаях, когда это требуется для выполнения специальных учебных задач
|
|||||||
|
11.4.R
|
Должны моделироваться следующие характеристики, а также обеспечиваться управление ими с РМИ:
|
Требуется проведение субъективного испытания
|
|||||
|
1) скорость и направление приземного ветра, а также порывы ветра;
|
+
|
||||||
|
2) скорость и направление ветра на средней и большой высоте;
|
+
|
||||||
|
3) гроза и микропорывы;
|
+
|
||||||
|
4) турбулентность.
|
+
|
||||||
|
11.4.G
|
Должны моделироваться следующие характеристики, а также обеспечиваться управление ими с РМИ:
|
Требуется проведение субъективного испытания
|
|||||
|
1) скорость и направление ветра;
|
+
|
||||||
|
2) турбулентность
|
+
|
||||||
12. Окружающая обстановка - посадочные площадки и прилегающая местность
|
12.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ ПОСАДОЧНЫХ ПЛОЩАДОК И ПРИЛЕГАЮЩЕЙ МЕСТНОСТИ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
12.S
|
Вертолетная площадка, вертодром или аэропорт: точное моделирование местности, направления ВПП, маркировки, освещения, размеров и рулежных дорожек
|
+
|
+
|
+
|
Содержание отображений местности
|
||
|
Отображение обстановки в дневное время должно включать соответствующим образом окрашенные и текстурированные небо и ландшафт местности, позволяющие четко определить пространственное положение вертолета
|
|||||||
|
Прилегающая местность: визуальное текстурирование местности должно обеспечивать воспроизведение достаточного количества эффектов, позволяющих пилотам определять скорость, высоту и получать информацию о положении для выполнения учебной задачи
|
Отображение обстановки в ночное время должно включать звезды, наземные огни и соответствующую текстуру, позволяющие четко определить пространственное положение вертолета и видеть различие между небом и поверхностью земли
|
||||||
|
Цвета и текстуры должны воспроизводить условия конкретной географической местности в соответствии с учебной задачей (нормальная растительность, пустыня, условия севера или джунгли)
|
|||||||
|
База данных о местности и база, данных усовершенствованной системы предупреждения о близости земли должны быть согласованы
|
Наземные объекты должны воспроизводиться в достаточном количестве для обеспечения ориентации и выравнивания при маневрировании по наземным ориентирам (по схемам движения или высотной/маловысотной разведке). Все наземные объекты должны воспроизводиться в соответствующем им размере и в перспективе, чтобы не отвлекать внимания пилота
|
||||||
|
Воспроизведение горизонта в дневное или ночное время может быть затенено множеством разорванных облаков или плотным слоем облачности, нижнюю или верхнюю кромки которой можно регулировать в зависимости от высоты полета вертолета
|
|||||||
|
Визуальное отображение должно позволять корректировать ухудшение видимости (дымка или туман), а также воспроизводить эффект выпадения осадков (дождя и снега)
|
|||||||
|
Может моделироваться воздушное и наземное движение
|
|||||||
|
Должны моделироваться эффекты:
|
|||||||
|
создаваемые струей НВ, соответствующие окружающей обстановке;
|
|||||||
|
трехмерная модель состояния (волнения) моря, соответствующая требованиям к обучению;
|
|||||||
|
движения деревьев в районе площадок ограниченных размеров;
|
|||||||
|
подробно представленные эффекты при посадке;
наклонные площадки
|
|||||||
|
12.R
|
Вертолетная площадка, вертодром или аэропорт: базовые требования, как в пункте 12.G, плюс, по крайней мере, одна полностью адаптированная к требованиям заказчика трехмерная модель аэропорта (вертодрома)
|
+
|
Должны воспроизводиться типовое летное поле или типовая посадочная площадка, включая их поверхности (трава, бетонированные площадки) и характеристики (мягкая, твердая, скользкая), однако не требуется соответствие реальным площадкам
|
||||
|
Прилегающая местность: должна включаться информация о топографических особенностях: таких как здания, деревья, препятствия, неподготовленные посадочные площадки, площадки ограниченных размеров, кораблях и буровых установках, если требуется, что позволяет проводить обучение навигации по ПВП
|
Если тренажер требуется для имитации выполнения полетов в условиях ограниченной видимости, в его базе данных должна присутствовать, по крайней мере, одна модель аэропорта, функциональные возможности которой позволяют обеспечивать требуемый уровень выполнения, (руление в условиях ограниченной видимости с указательными щитами, с огнями стоп-линий, огнями приближения, освещения ВПП и рулежной дорожки). Это должно включать моделирование частичной потери видимости вследствие поднятой потоками воздуха пыли, снега, а также явлений на поверхности земли (потоки воздуха от НВ, движение травы и поверхности моря)
|
||||||
|
В модель должны включаться трехмерные изображения состояния моря, если это требуется для подготовки
|
Отображение обстановки в дневное время должно включать в себя соответствующим образом окрашенные и текстурированные небо и ландшафт, позволяющие четко определить пространственное положение вертолета
|
||||||
|
Для проведения подготовки к выполнению маршрутных полетов по ПВП: возможность точно воспроизводить наземные визуальные ориентиры и топографические особенности, достаточные для осуществления навигации по ПВП согласно соответствующим картам (масштаб карт 1:500000, 1:250000, 1:100000)
|
|||||||
|
Отображение обстановки в ночное время должно включать звезды, наземные огни, и соответствующую текстуру, позволяющие четко определить пространственное положение вертолета и проводить различие между небом и поверхностью земли
|
|||||||
|
Цвета и текстуры должны воспроизводить условия конкретной географической местности, в соответствии с учебной задачей (нормальная растительность, пустыня, условия севера или джунгли)
|
|||||||
|
Наземные объекты должны воспроизводиться в достаточном количестве для обеспечения ориентации и выравнивания при маневрировании по наземным ориентирам (по схемам движения или высотной/маловысотной разведке). Все наземные объекты должны воспроизводиться в соответствующих им размерах и в перспективе, чтобы не отвлекать внимания пилота
|
|||||||
|
Воспроизведение горизонта в дневное или ночное время может быть затенено множеством разорванных облаков или плотным слоем облачности, нижнюю или верхнюю кромки которой можно регулировать в зависимости от высоты полета вертолета
|
|||||||
|
Визуальное отображение должно позволять корректировать ухудшение видимости (дымка или туман), а также воспроизводить эффект выпадения осадков (дождя и снега)
|
|||||||
|
Может моделироваться воздушное и наземное движение.
|
|||||||
|
12.G
|
Базовые модели аэропорта (вертодрома) и топографические особенности местности должны обеспечивать заявленное использование. Должен присутствовать видимый горизонт
|
+
|
В модели должна быть маркировка и освещение ВПП и рулежных дорожек.
|
||||
|
Приемлемо использование плоского отображения ограниченного пространства.
|
|||||||
|
Должна отображаться траектория движения законцовки лопасти НВ
|
|||||||
|
Должны моделироваться визуальные отображения в дневное, ночное время и в сумерки, содержание которых позволяет распознать базовые аэродромы, вертодромы, местность и наземные ориентиры в зоне конечного этапа захода на посадку и взлета, а также выполнять маневры с низкой воздушной скоростью или на малой высоте, в том числе отрыв от земли, висение, переход от висения к горизонтальному полету и обратно, посадку и касание, что необходимо для подготовки к полетам по ППП
|
Отображение обстановки в дневное время должно включать в себя соответствующим образом окрашенные небо и местность, позволяющие четко определить пространственное положение вертолета
|
||||||
|
Отображение обстановки в ночное время должно включать звезды, наземные огни, и соответствующую текстуру, позволяющие четко определить пространственное положение вертолета и проводить различие между небом и поверхностью земли
|
|||||||
|
Воспроизведение горизонта в дневное или ночное время может быть затенено плотным слоем облачности, нижнюю и верхнюю кромки которой можно регулировать в зависимости от высоты полета вертолета
|
|||||||
|
Визуальное отображение должно позволять корректировать ухудшение видимости (дымка или туман)
|
|||||||
|
Не требуется, чтобы в модели местности воспроизводилось конкретное место
|
|||||||
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ ПОСАДОЧНЫХ ПЛОЩАДОК И ПРИЛЕГАЮЩЕЙ МЕСТНОСТИ
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
|
12.1
|
ВИЗУАЛЬНОЕ ОТОБРАЖЕНИЕ АЭРОПОРТОВ/ПОСАДОЧНЫХ ПЛОЩАДОК
|
||||||
|
12.1.S
|
Ниже приведены минимальные требования к содержанию моделей аэропортов (посадочных площадок), выполнение которых необходимо для проведения испытаний возможностей системы визуализации и обеспечения соответствующих визуальных эффектов для проведения всех функциональных и субъективных испытаний
|
+
|
+
|
+
|
Назначенный реальный аэропорт или вертодром должны быть частью утвержденной программы подготовки
|
||
|
Должны быть представлены как минимум следующие аэропорты (посадочные площадки:
минимум, один конкретный реальный аэропорт или вертодром;
минимум, три посадочные площадки, не связанных с аэропортом, включая:
минимум, одну вертолетную посадочную площадку, расположенную на поверхности, существенно возвышающейся относительно окружающих строений или местности (крыша здания или морская нефтяная платформа);
минимум, одну вертолетную посадочную площадку ограниченных размеров;
по крайней мере, одну вертолетную посадочную площадку, расположенную на наклонной поверхности, с углом наклона, как минимум, 2,5°
|
|||||||
|
12.1.R
|
Должны быть представлены, как минимум, модель одного аэропорта или вертодрома и модель одной вертолетной посадочной площадки
|
+
|
Точность воспроизведения визуального отображения должна быть достаточной для того, чтобы экипаж мог визуально распознать аэропорт или вертолетную посадочную площадку, определить положение моделируемого вертолета по отношению к визуальному отображению, успешно выполнять взлеты, заходы на посадку, посадки, маневрирование в аэропорту по земле, или руление по воздуху, в случае необходимости
|
||||
|
Аэропорт или вертодром и вертолетная посадочная площадка могут содержаться в одной модели. При выборе этого варианта траектория захода на посадку к ВПП аэродрома и траектория захода на посадку к вертолетной посадочной площадке должны быть различными
|
Аэропорт, вертодром или вертолетная посадочная площадка могут быть как реально существующими, так и вымышленными
|
||||||
|
12.1.G
|
Система должна включать модель базового аэропорта с имеющейся вертолетной посадочной площадкой
|
+
|
|||||
|
12.2
|
АКТУАЛЬНОСТЬ БАЗЫ ДАННЫХ АЭРОПОРТА ИЛИ ВЕРТОДРОМА
|
||||||
|
12.2.S
|
Моделируемый в системе конкретный аэродром или вертодром должен поддерживаться на уровне требований, чтобы соответствовать состоянию реального аэродрома или вертодрома, как это определено в схемах реального аэропорта или вертодрома
|
+
|
+
|
+
|
В случае изменений в соответствующем реальном аэропорту или на вертодроме, эти изменения должны быть внесены в базу данных тренажера в течение 6 месяцев
|
||
|
12.2.R, G
|
Требования не предъявляются
|
||||||
|
12.3
|
ДЕТАЛИЗАЦИЯ ВИЗУАЛЬНОЙ ОБСТАНОВКИ
|
||||||
|
12.3.S
|
Должны воспроизводиться визуальные эффекты, обеспечивающие оценку вертикальной скорости снижения и восприятие глубины во время взлета и посадки
|
+
|
+
|
+
|
Ориентиры на поверхность земли и топографические особенности должны быть различимы для выполнения полетов по ПВП с применением навигационных карт масштаба 1:500000, 1:250000, 1:100000
|
||
|
Должно обеспечиваться высокодетализированное и точное отображение поверхности земли в зоне, достаточной для выполнения маршрутных полетов по ПВП
|
|||||||
|
12.3.R
|
Должны воспроизводиться визуальные эффекты, обеспечивающие оценку вертикальной скорости снижения и восприятие глубины во время взлета и посадки
|
+
|
|||||
|
Должно обеспечиваться высокодетализированное и точное отображение поверхности земли в пределах зоны приблизительно 400 м до и 400 м после начала ВПП общей шириной 400 м, включая ширину ВПП
|
|||||||
|
12.3.G
|
Должны воспроизводиться текстурированные поверхности, обеспечивающие оценку вертикальной скорости снижения и восприятие глубины во время взлета и посадки
|
+
|
|||||
|
12.4
|
СОДЕРЖАНИЕ ВИЗУАЛЬНЫХ ОТОБРАЖЕНИЙ
|
||||||
|
12.4.S
|
Система визуализации должна обеспечивать создание отображений, содержание которых сопоставимо по детализации с отображениями обстановки, состоящими, как минимум, из 6000 многоугольников и 1000 видимых точечных источников света, в дневное время, ночное время и сумерки
|
+
|
+
|
+
|
|||
|
12.4.R
|
Система визуализации должна обеспечивать создание отображений, содержание которых сопоставимо по детализации с отображениями обстановки, состоящими, как минимум, из 6000 многоугольников и 1000 видимых точечных источников света, в дневное время, ночное время и сумерки
|
+
|
|||||
|
12.4.G
|
Система визуализации должна обеспечивать создание отображений, содержание которых сопоставимо по детализации с отображениями обстановки, состоящими, как минимум, из 6000 многоугольников и 1000 видимых точечных источников света, в дневное время, ночное время и сумерки
|
+
|
|||||
|
12.5
|
СПЕЦИАЛЬНЫЕ ЭФФЕКТЫ
|
||||||
|
12.5.S
|
Должна обеспечиваться возможность воспроизведения следующих эффектов:
1) эффектов, создаваемых потоком воздуха от НВ, включая частичную потерю видимости в результате поднятой пыли, снега;
2) состояние моря, включая соответствующее движение корабля, используемого для посадки на палубу;
3) эффект воздействия ветра на водную поверхность;
4) движение деревьев и травы в районе посадочных площадках ограниченных размеров;
5) неподвижные и движущиеся транспортные средства на земле и в воздухе, с которыми может столкнуться моделируемый вертолет.
|
+
|
+
|
+
|
Перемещение корабля должно как минимум соответствовать состоянию моря по крену, дифференту и вертикальным перемещениям
|
||
|
12.5.R
|
Должна обеспечиваться возможность воспроизведения следующих эффектов:
1) эффектов, создаваемых потоком воздуха от НВ, включая частичную потерю видимости в результате поднятой пыли, снега;
2) состояние моря, включая соответствующее движение корабля, используемого для посадки на палубу;
3) эффект воздействия ветра на водную поверхность;
4) неподвижные и движущиеся транспортные средства на земле и в воздухе, с которыми может столкнуться моделируемый вертолет
|
+
|
|||||
|
12.5.G
|
Требования не предъявляются
|
||||||
13 Моделирование управления воздушным движением (УВД)
|
13.
|
ОБЩИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ (УВД)
(Требования к моделируемой окружающей обстановке - УВД, приведенные в данном разделе, в настоящее время не должны рассматриваться как директивные для оценки тренажера)
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
13.S, R
|
Должна автоматически моделироваться динамически изменяющаяся обстановка в зоне аэродрома, включая ответы органов УВД на речевые запросы пилотов самолета и соответствующие инициированные органами УВД сообщения
|
Перечисленные в разделе требования могут быть реализованы только по внедрении имитатора изменяющихся условий УВД.
|
|||||
|
Корреляция с видимым движением на земле, совершающими посадку и вылетающими воздушными судами, включая моделирование зон аэропортов в соответствии с программами подготовки
|
|||||||
|
13.G
|
Должны воспроизводиться конкретные сообщения органов УВД, включая ответы на запросы пилотов вертолета в соответствии с этапами полета.
Сообщения с борта самолета, передаваемые пилотам вертолета, должны быть типичными для органов УВД. Это может сделать инструктор, который имитирует работу органов УВД
|
+
|
+
|
+
|
+
|
+
|
|
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К МОДЕЛИРОВАНИЮ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ (УВД)
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
|
13.1
|
АВТОМАТИЗИРОВАННЫЕ МЕТЕОСВОДКИ
|
Автоматизированные метеосводки обеспечивают пилотов важной информацией о метеоусловиях и оперативной информацией УВД. Сообщения автоматической системы передачи информации в районе аэродрома (ATIS) и другая автоматизированная информация о метеоусловиях также могут передаваться в кабину пилотов по линии передачи данных
|
|||||
|
Хотя ATIS является наиболее распространенной автоматизированной системой передачи информации о метеоусловиях, в некоторых случаях в зависимости от условий эксплуатации необходимо учитывать передаваемые другими автоматизированными системами метеосводки (автоматической системой приземных наблюдений/автоматизированной системой наблюдения за погодой (ASOS/AWOS)), которые используются в аэропортах или на вертодромах и которые функционируют только частично или не имеют своего АДП
|
|||||||
|
13.1 S, R, G
|
Автоматизированные метеосводки с одной станции
|
+
|
+
|
+
|
+
|
+
|
Для всех аэропортов или вертодромов в пределах дальности полета требуется, как минимум, одна автоматизированная метеосводка. Сообщения должны включать сведения о фактических погодных условиях, заданных для тренажера, указание соответствующего аэропорта/вертодрома, ВПП, температуру, параметры ветра, давление, приведенное к уровню моря, облачность, видимость, состояние ВПП, а также других заранее определенные условия, которые невозможно считывать с модели.
|
|
13.2
|
ФОНОВЫЕ ПЕРЕГОВОРЫ
|
||||||
|
13.2.1 S, R, G
|
Фоновые переговоры (по линии связи коллективного пользования).
Как правило, все фоновые переговоры должны отвечать следующим критериям:
1) сообщения должны быть понятны в контексте моделируемой окружающей обстановки и не должны содержать явно ошибочную информацию;
2) на соответствующей частоте должны быть слышны только те сообщения, которые обычно передаются на данной частоте;
3) моделируемые сообщения на заданной частоте не должны накладываться друг на друга или на переговоры летного экипажа тренажера;
4) между сообщениями должны быть достаточные перерывы, позволяющие экипажу тренажера при необходимости получить доступ к заданной частоте
|
+
|
+
|
+
|
+
|
+
|
Переговоры по линии связи коллективного пользования имитируют фоновые переговоры, которые слышны в кабине (переговоры между двумя ВС, между ВС и землей, переговоры земли с землей, за исключением переговоров с самим ВС)
|
|
13.2.2 S
|
Переговоры определяются обстановкой.
|
Фоновые переговоры определяются обстановкой
|
|||||
|
Содержание сообщений определяется конкретным местоположением и обстановкой, причем сообщения должны полностью коррелироваться с визуально моделируемым воздушным движением
|
Моделирование фоновых переговоров должно обеспечивать воспроизведение переговоров по линии связи коллективного пользования, причем сообщения должны быть увязаны с моделируемой обстановкой как по форме, так и по содержанию
|
||||||
|
Должны точно воспроизводиться процедуры и обозначения для конкретного местоположения. Все переговоры должны полностью коррелироваться с визуально моделируемым воздушным движением
|
|||||||
|
Количество голосов должно быть достаточным для того, чтобы можно было различать разные службы УВД и пилотов
|
|||||||
|
Система должна включать модели, как минимум, трех конкретных зон аэропортов. Эти три конкретные зоны аэропортов должны быть частью утвержденной программы подготовки
|
|||||||
|
13.2.2 R
|
Переговоры определяются обстановкой.
|
Фоновые переговоры определяются обстановкой.
|
|||||
|
Базовые сообщения, общие для всех аэродромов/вертодромов, должны полностью коррелироваться с визуально моделируемым воздушным движением
|
Моделирование фоновых переговоров должно обеспечивать воспроизведение определяемых конкретной обстановкой сообщений, передаваемых в базовом типовом формате, общем для всех местоположений
|
||||||
|
Фоновые переговоры должны коррелироваться со сценарием воздушного движения и не должны противоречить положению и движениям вертолета
|
|||||||
|
Сообщения также должны коррелироваться с визуальным воспроизведением воздушного движения
|
|||||||
|
Количество голосов должно быть достаточным для того, чтобы можно было различать разные службы УВД и пилотов
|
|||||||
|
Система должна включать в себя модели, как минимум, трех конкретных зон аэропортов. Эти три конкретные зоны аэропортов должны быть частью утвержденной программы подготовки
|
|||||||
|
13.2.2 G
|
Базовые сообщения в зависимости от конкретной обстановки
|
+
|
+
|
+
|
+
|
+
|
Для моделирования фоновых переговоров могут использоваться только базовые сообщения. Эти сообщения должны определяться таким образом, чтобы для их адаптации с моделируемой обстановкой требовалась лишь незначительная дополнительная информация или вообще не требовалась
|
|
Базовые сообщения без корреляции
|
Голоса должны быть различимы лишь в той степени, чтобы не путать пилотов и службы УВД
|
||||||
|
13.3
|
МОДЕЛИРОВАНИЕ УВД - ВЗАИМОДЕЙСТВИЕ С ТРЕНАЖЕРОМ
|
Получаемые сообщения о положении вертолета, оперативной обстановке и условиям окружающей среды должны соответствовать визуальным сценам и сценарию работы системы TCAS (система предотвращения столкновения в воздухе и приближения к земле) (если применимо)
|
|||||
|
13.3 S, R
|
Моделируемые параметры
|
Система должна моделировать, как минимум, три конкретных зоны аэродрома. Эти три конкретных зоны аэродрома должны быть частью утвержденной программы подготовки
|
|||||
|
Система моделирования связи со службами УВД совместно с имитацией бортовых систем вертолета и соответствующей окружающей обстановки должны обеспечивать моделирование следующих параметров:
1) направление, скорость и порывы ветра;
2) атмосферное давление, приведенное к уровню моря и атмосферное давление на уровне аэродрома (установка высотомера);
3) температура: температура наружного воздуха;
4) точка росы;
5) облачность: высота, тип;
6) видимость;
7) дальность видимости на ВПП (туман, стелющийся туман, туман местами);
8) сложные метеоусловия: дождь, снег
(с порывами ветра), турбулентность, обледенение, ожидаемый сдвиг ветра, микропорывы, грозовые облака и грозовой фронт (приближенное положение);
9) действующие ВПП;
10) состояние ВПП: загрязнение и глубина загрязнения;
11) торможение;
12) всемирное скоординированное время;
13) положение, маршрут, курс, относительная высота вертолета;
14) позывной вертолета
|
Включая визуализацию, если применимо
|
||||||
|
13.4
|
МОДЕЛИРОВАНИЕ УВД - ВЗАИМОДЕЙСТВИЕ С ИНСТРУКТОРОМ
|
||||||
|
13.4 S, R
|
Инструктор должен иметь возможность взаимодействовать со сценарием, вводя соответствующие сообщения для вертолета. По мере необходимости эти сообщения должны группироваться следующим образом по этапам полета или категориям:
1) процедура вылета:
a) диспетчерское обслуживание;
b) техническое обслуживание;
c) вылет;
d) разрешение на полет по маршруту;
e) буксировка хвостом вперед;
f) другие обычные переговоры со службой УВД/авиакомпанией;
2) противообледенительная обработка;
3) руление;
4) предварительный старт;
5) взлет;
6) действия после взлета;
7) набор высоты;
8) полет по маршруту;
9) снижение;
10) прибытие (система ATIS);
11) полет в зоне ожидания;
12) заход на посадку;
13) посадка;
14) аварийная ситуация;
15) другие сообщения;
16) кабинный экипаж
|
Независимо от способа моделирования УВД, учитывается рабочая нагрузка на инструктора при выполнении им функций управления имитатором УВД, чтобы убедиться, что она не отвлекает его от наблюдения за действиями экипажа в процессе обучения, тестирования или проверки
|
|||||
|
13.5
|
ИНИЦИИРОВАНИЕ СООБЩЕНИЙ УВД
|
Инструктор должен иметь возможность инициировать сообщения в ручном режиме или автоматически
|
|||||
|
13.5.1 S, R
|
Ручной режим (основной)
|
Сообщение инициируется по запросу инструктора самим инструктором с РМИ
|
|||||
|
13.5.2 S, R
|
Автоматический режим (расширенный)
|
Сообщение инициируется автоматически, когда удовлетворены все критерии, связанные с содержанием сообщения (наземное или воздушное движение, этап полета, метеоусловия). В том случае, если вертолет не выполняет указания службы УВД или не следует протоколам обратного считывания, система должна предоставлять корректирующие сообщения
|
|||||
|
13.5.3 S, R
|
Система моделирования связи со службами УВД должна обеспечивать инструктору возможность делать паузы при ведении радиообмена и (или) отключать систему и возвращаться к классическому моделированию без УВД
|
||||||
|
13.6
|
ФРАЗЕОЛОГИЯ
|
||||||
|
13.6.1 S, R, G
|
Фразеология и речевые характеристики
|
+
|
+
|
+
|
+
|
+
|
|
|
13.7
|
РАСПОЗНАВАНИЕ ЧАСТОТЫ СЛУЖБЫ УВД, СООТВЕТСТВУЮЩЕЙ КОНКРЕТНОМУ ЭТАПУ ПОЛЕТА
|
||||||
|
13.7.1 S, R, G
|
Связь должна вестись на радиочастотах, установленных в кабине пилотов:
|
+
|
+
|
+
|
+
|
+
|
Распознавание частоты службы УВД, соответствующей конкретному этапу полета, является требованием для всех уровней моделирования УВД, а это означает, что все сообщения, которые получает пилот, должны передаваться на радиочастотах, установленных в кабине пилотов
|
|
1) одночастотная связь;
|
|||||||
|
2) многочастотная связь
|
+
|
+
|
+
|
+
|
+
|
Пример: первый пилот прослушивает сообщение системы ATIS о метеорологической и аэронавигационной обстановке в районе аэродрома на одной радиостанции, а второй пилот ждет разрешения на вылет на другой радиостанции
|
|
|
13.7.2 S, R, G
|
Моделируемая окружающая обстановка должна обновляться в сочетании с обновлениями других систем в зависимости от изменений радиочастот компании или службы УВД
|
+
|
+
|
+
|
+
|
+
|
Должно быть устройство для использования радиочастот компании, но оно необязательно должно быть связано с "реальным миром" радиочастот, используемых компанией, при условии, что это не вызывает проблем с существующими частотами УВД
|
|
13.8
|
УПРАВЛЕНИЕ ИНСТРУКТОРОМ СО СВОЕГО РАБОЧЕГО МЕСТА ДВИЖЕНИЕМ ДРУГИХ ВС
|
||||||
|
13.8.1 S, R, G
|
Инструктор управляет с РМИ движением других ВС
|
+
|
+
|
+
|
+
|
+
|
|
|
13.8.2 S, R
|
Корреляция
|
Радиообмен со службами УВД должен соответствовать передвижениям других видов наземного и воздушного транспорта, учитывая и те, которые связаны с опасными ситуациями, а также вопросы приоритета ВС
|
|||||
|
Радиообмен должен быть согласован с воспроизведением другого моделируемого наземного и воздушного движения и систем вертолета
|
Информация о движении, которая отображается как визуальными, так и бортовыми системами, должна быть согласована с системой TCAS
|
||||||
|
13.8.3 S, R
|
Поток движения
|
||||||
|
В моделируемом аэропорту (вертодроме) должна быть типовая для данного времени суток плотность потока движения, если инструктор не выбрал иное.
|
|||||||
|
Следует соблюдать типовое время разделения потоков движения
|
|||||||
|
13.9
|
СИСТЕМА СВЯЗИ ПО ЛИНИИ ПЕРЕДАЧИ ДАННЫХ
|
||||||
|
13.9.1 S
|
Бортовая система связи для адресации и передачи данных ACARS
Сеть авиационной электросвязи ATN
|
Если установлены
|
|||||
14 Прочие характеристики
|
14.
|
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ИМИТАЦИИ ПРОЧИХ ХАРАКТЕРИСТИК
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
14.1
|
РАБОЧЕЕ МЕСТО ИНСТРУКТОРА (РМИ)
|
||||||
|
14.1 S
|
С РМИ должен обеспечиваться адекватный обзор приборных панелей пилота и вид через лобовые стекла
|
+
|
+
|
+
|
В тренажера, оборудованном системой подвижности, любое место инструктора, расположенное в кабине, должно быть надежно закреплено и оборудовано достаточно целостными удерживающими устройствами, чтобы сидящий в кресле был надежно зафиксирован во время всех известных или предполагаемых движений платформы тренажера
|
||
|
Если на тренажерном устройстве установлена EFVS, то на РМИ должен быть монитор EFVS, дублирующий имитируемую систему EFVS, которая отображается пилоту в виде индикации на лобовом стекле. Это включает любые отображаемые данные и символы. Формат монитора (соотношение сторон) должен точно соответствовать формату монитора пилота
|
|||||||
|
14.1 R
|
С РМИ должен обеспечиваться адекватный обзор приборных панелей пилота и вид через лобовые стекла
|
+
|
+
|
||||
|
14.1 G
|
Требования не предъявляются
|
||||||
|
14.2
|
ОРГАНЫ УПРАВЛЕНИЯ НА РМИ
|
||||||
|
14.2 S, R, G
|
РМИ должно быть оборудовано органами управления, которые обеспечивают управление всеми переменными параметрами системы; позволяют вводить особые и аварийные ситуации в моделируемые системы вертолета; позволяют контролировать все эффекты окружающей обстановки, моделирование которых должно обеспечиваться на РМИ (облачность, видимость, обледенение, осадки, температура, грозовые очаги, а также скорость и направление ветра). С РМИ должна обеспечиваться возможность имитации наземных и воздушных опасных ситуаций. Оно должно предоставлять инструктору возможность моделировать эффекты циркуляции пыли, водяных паров или снежной пелены, которые возникают в результате скоса потока воздуха от НВ
|
+
|
+
|
+
|
+
|
+
|
|
|
14.3
|
ИСПЫТАНИЕ В ФОРМЕ САМОДИАГНОСТИКИ
|
||||||
|
14.3 S
|
Для определения целостности функционирования аппаратного и программного обеспечения и проведения быстрого и эффективного ежедневного испытания тренажера должна быть предусмотрена система самодиагностики тренажера
|
+
|
+
|
+
|
Требуется ЗОС
|
||
|
14.3 R, G
|
Требования не предъявляются
|
||||||
|
14.4
|
ПРОИЗВОДИТЕЛЬНОСТЬ КОМПЬЮТЕРА
|
||||||
|
14.4 S, R, G
|
Производительность компьютера, точность, разрешение и динамические характеристики должны быть достаточными и в полной мере обеспечивать общую адекватность тренажера, искомому типу квалификации.
|
+
|
+
|
+
|
+
|
+
|
Требуется ЗОС
|
|
14.5
|
СРЕДСТВА АВТОМАТИЧЕСКОГО ИСПЫТАНИЯ
|
||||||
|
14.5 S
|
Для определения соответствия аппаратного и программного обеспечения тренажера требованиям необходимо проведение автоматического испытания в соответствии с требованиями испытаний
|
+
|
+
|
+
|
Заключение об испытании должно включать идентификатор испытания, номер тренажера, дату, время, условия, допуски и соответствующие зависимые переменные, отображенные в сравнении со стандартными данными для вертолета.
|
||
|
14.5 R, G
|
Должно обеспечиваться проведение испытаний аппаратного и программного обеспечения тренажера в целях периодической проверки
|
+
|
+
|
Заключение об испытании должно включать: идентификатор испытания, номер тренажера, дату, время, условия, допуски и соответствующие зависимые переменные, отображенные в сравнении с испытаниями согласно программам испытаний
|
|||
|
Рекомендуется проведение автоматического испытания
|
|||||||
|
14.6
|
ОБНОВЛЕНИЯ АППАРАТНОГО И ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ТРЕНАЖЕРА
|
||||||
|
14.6 S, R
|
Своевременное постоянное обновление аппаратного и программного обеспечения тренажера должно проводиться после модификации вертолета, если она влияет на подготовку, соответствующую искомому квалификационному уровню
|
+
|
+
|
+
|
+
|
+
|
|
|
14.6 G
|
Своевременное постоянное обновление аппаратного и программного обеспечения тренажера в соответствии с рекомендациями изготовителя тренажера в тех случаях, когда это влияет на подготовку и/или безопасность
|
||||||
|
14.7
|
ЕЖЕДНЕВНАЯ ПРЕДПОЛЕТНАЯ ДОКУМЕНТАЦИЯ
|
||||||
|
14.7 S, R, G
|
Требуется ежедневная предполетная документация, которая хранится либо в бортовом журнале, либо в таком месте, где ее можно легко найти и просмотреть
|
+
|
+
|
+
|
+
|
+
|
|
|
14.8
|
ИНТЕГРАЦИЯ СИСТЕМ
|
||||||
|
Интеграция систем
Относительная реакция системы визуализации, приборов в кабине летного экипажа и начальные воздействия системы подвижности должны быть тесно увязаны, чтобы обеспечить целостность воспринимаемых сигналов. Изменения визуальной картины в результате стационарных возмущений (с момента начала сканирования первой видеозоны, содержащей иную информацию) должны происходить в пределах динамической реакции системы порядка от 85 до 120 миллисекунд (мс) в зависимости от типа тренажера. Начало движения также должно происходить в пределах динамической реакции системы от 85 мс до 120 мс в зависимости от типа тренажера. При этом начало движения должно происходить перед началом сканирования первой видеозоны, содержащей различную информацию, и должно закончиться до завершения сканирования той же самой видеозоны
|
Вместо испытания по оценке транспортной задержки можно использовать испытание по оценке времени запаздывания
|
||||||
|
Испытание для определения соответствия этим требованиям должно включать одновременную регистрацию следующих выходных параметров:
выходных сигналов с рычагов управления по тангажу, крену и рысканию;
выходного сигнала акселерометра, присоединенного к платформе системы подвижности и установленного в приемлемом месте рядом с креслами пилотов;
выходного сигнала дисплея системы визуализации (включая аналоговые задержки системы визуализации);
выходного сигнала индикатора пространственного положения вертолета, или эквивалентные испытания, которые утверждены уполномоченным органом
|
|||||||
|
14.8.S
|
Транспортная задержка:
|
+
|
+
|
+
|
Результаты необходимы для приборов и для систем подвижности и визуализации
|
||
|
Испытание по оценке транспортной задержки должно использоваться для демонстрации того, что ответная реакция систем тренажера не превышает 85 мс
|
Дополнительные результаты испытаний по оценке транспортной задержки необходимы, если установлены системы индикации на лобовом стекле, которые моделируются, но не являются реальными системами вертолета
|
||||||
|
Если установлено EFVS, то эти системы должны реагировать в пределах +/- 30 мс относительно системы визуализации, но не раньше реакции системы подвижности
|
Если режим работы системы визуализации (дневной свет, сумерки и ночь) может повлиять на рабочие характеристики, необходимо провести дополнительные испытания
|
||||||
|
Требуется ЗОС, если режим функционирования системы визуализации не влияет на рабочие характеристики, что исключает необходимость проведения дополнительных испытаний
|
|||||||
|
14.8. R, G
|
Транспортная задержка:
Испытание по оценке транспортной задержки должно использоваться для демонстрации того, что ответная реакция систем тренажера не превышает 120 мс.
|
+
|
+
|
Результаты необходимы только для соответствующих систем
|
|||
|
14.9
|
РЕГИСТРАЦИЯ, ЗАМОРАЖИВАНИЕ И ВОСПРОИЗВЕДЕНИЕ
|
||||||
|
14.9 S, R, G
|
Возможности регистрации, замораживания и воспроизведения
|
+
|
+
|
+
|
+
|
+
|
|
|
14.10
|
ИНСТРУКТАЖ И РАЗБОР ПОЛЕТОВ
|
||||||
|
14.10 S, R, G
|
Возможность проведения инструктажа и разбора полетов
|
+
|
+
|
+
|
+
|
+
|
|
Испытания на соответствие требованиям объективного контроля параметров.
Таблица B2
|
N
|
ИСПЫТАНИЕ
|
ДОПУСК
|
УСЛОВИЯ ПОЛЕТА
|
Тип I
|
Тип II
|
Тип III
|
Тип IV
|
Тип V
|
ПРИМЕНЕНИЕ ТРЕНАЖЕРОВ
|
|
1.
|
ЛЕТНО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
|
Все испытания с одним неработающим двигателем, представленные в данном разделе, применимы только к многодвигательным вертолетам
|
|||||||
|
1.a
|
Оценка работы двигателя
|
||||||||
|
1) Действия по запуску/запуск:
|
|||||||||
|
i) Запуск и разгон двигателя(ей) (неустановившийся режим)
|
Время от нажатия кнопки запуска до начала раскрутки ротора двигателя
|
На земле.
|
+
|
+
|
+
|
Изменения параметров по времени для каждого двигателя с момента запуска до выхода на установившийся режим малого газа и с выхода с установившегося режима малого газа до режима с номинальной частотой вращения НВ.
|
|||
|
Тормоз НВ выключен или включен (если применимо)
|
|||||||||
|
+/- 10% или +/- 1 с
|
|||||||||
|
крутящий момент +/- 5%
|
Для многодвигательного вертолета испытание должно представлять собой запуск двух двигателей последовательно
|
||||||||
|
частота вращения НВ +/- 3%
|
|||||||||
|
число оборотов турбокомпрессора +/- 5%
|
Приведенные значения допусков должны применяться только в пределах рабочих диапазонов датчиков измерения параметров двигателя
|
||||||||
|
частота вращения силовой турбины +/- 5%
|
|||||||||
|
температура газов в турбине +/- 30 °C
|
|||||||||
|
ii) Установившийся режим малого газа и режим с номинальной частотой вращения в оборотах в минуту
|
Для уровня адекватности S:
|
На земле
|
+
|
+
|
+
|
Данные должны быть представлены как для установившегося режима малого газа, так и для режима с номинальной частотой вращения НВ. Может быть представлен вектор мгновенного состояния.
|
|||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
частота вращения турбокомпрессора +/- 2%
|
|||||||||
|
частота вращения силовой турбины +/- 2%
|
|||||||||
|
температура газа в турбине +/- 20 °C
|
|||||||||
|
Для уровней адекватности G и R:
|
+
|
+
|
|||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
2) Балансировка частоты вращения силовой турбины
|
10% от полного изменения частоты вращения силовой турбины или +/- 1,5% от частоты вращения НВ
|
На земле
|
+
|
+
|
+
|
Изменения по времени характеристик двигателя как реакция на включение системы балансировки (в обоих направлениях)
|
|||
|
3) Регулирование частоты вращения двигателя и НВ
|
Крутящий момент +/- 5%
Частота вращения НВ +/- 1,5%
|
Набор высоты и снижение
|
+
|
+
|
+
|
Входные воздействия на общий шаг. Испытания таких воздействий могут проводиться на режимах набора высоты и снижения
|
|||
|
Требуется проведение двух испытаний:
одно испытание, демонстрирующее увеличение общего шага;
одно испытание, демонстрирующее уменьшение общего шага
|
|||||||||
|
1.b
|
Движение по земле
|
||||||||
|
1.b
|
1) Изменение угловой скорости разворота в зависимости от перемещения педалей или угла поворота носового колеса
|
Угловая скорость разворота +/- 10% или +/- 2°/с
|
На земле
|
+
|
+
|
+
|
Без использования колесного тормоза. Испытание для демонстрации реакции вертолета на управляющие воздействия в обоих направлениях
|
||
|
1.b
|
2) Руление
|
Крутящий момент +/- 3%
|
На земле
|
+
|
+
|
+
|
Положения рычагов управления во время руления по земле для характерных значений путевой скорости, барометрической высоты и в соответствии с направлением движения
|
||
|
продольное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%
положение педалей путевого управления +/- 5%
|
|||||||||
|
общий шаг НВ +/- 5%
|
|||||||||
|
1.c
|
Взлет
|
Если диапазон скоростей в перечисленных ниже испытаниях составляет менее 74 км/ч (40 узлов), соответствующий допуск по воздушной скорости может применяться как к воздушной скорости, так и к путевой скорости
|
|||||||
|
Если относительная высота отсутствует, то может использоваться высота, определяемая относительно уровня моря, выбранного за начало отсчета (далее - абсолютная высота)
|
|||||||||
|
1.c
|
1) Со всеми работающими двигателями
|
Для уровня адекватности S:
воздушная скорость +/- 5,6 км/ч
(3 уз);
высота +/- 6,1 м (20 фут);
крутящий момент +/- 3%;
частота вращения НВ +/- 1,5%;
угол тангажа 1,5°;
угол крена 2°;
курс 2°;
продольное отклонение ручки управления циклическим шагом +/- 10%;
поперечное отклонение ручки управления циклическим шагом +/- 10%;
положение педалей путевого управления +/- 10%;
общий шаг НВ +/- 10%
|
Висение
|
+
|
+
|
+
|
Изменения параметров по времени траектории набора высоты после взлета для соответствующего моделируемого вертолета и типа тренажера
|
||
|
Взлет из режима висения в зоне влияния земли
Данные регистрируются до достижения высоты, как минимум, 61 м (200 фут) над уровнем земли
|
|||||||||
|
Для уровня адекватности R:
воздушная скорость +/- 5,6 км/ч
(3 уз);
высота +/- 6,1 м (20 фут);
крутящий момент +/- 3%
частота вращения НВ +/- 1.5%;
угол тангажа +/- 2,5°;
угол крена +/- 2°;
курс +/- 2°
|
+
|
+
|
|||||||
|
1.c
|
2) Продолженный взлет при отказе одного двигателя
|
Для уровня адекватности S:
воздушная скорость +/- 5,6 км/ч 3 уз);
высота +/- 6,1 м (20 футов);
крутящий момент +/- 3%;
частота вращения НВ +/- 1,5%;
угол тангажа +/- 1,5°;
угол крена +/- 2°;
курс +/- 2°;
продольное отклонение ручки управления циклическим шагом +/- 10%;
поперечное отклонение ручки управления циклическим шагом +/- 10%;
положение педалей путевого управления +/- 10%;
общий шаг НВ +/- 10%
|
Висение
|
+
|
+
|
+
|
Изменения параметров по времени траектории набора высоты после взлета для соответствующего имитируемого вертолета
|
||
|
Данные регистрируются до достижения высоты, как минимум, 61 м (200 футов) над уровнем земли
|
|||||||||
|
Для уровня адекватности R:
|
+
|
+
|
|||||||
|
воздушная скорость +/- 5,6 км/ч (3 уз)
|
|||||||||
|
высота +/- 6,1 м (20 футов)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа +/- 2,5°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
1.c
|
3) Прерванный взлет при отказе одного двигателя
|
Для уровня адекватности S: воздушная скорость +/- 5,6 км/ч (3 уз)
|
Висение
|
+
|
+
|
+
|
Изменения параметров по времени от точки отрыва до касания земли
Условия испытания при предельных значениях летно-технических характеристик.
Данное испытание соответствует открытой зоне выполнение взлета при отказе одного двигателя до достижения TDP
|
||
|
высота +/- 6,1 м (20 футов)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения +/- НВ 1,5%
|
|||||||||
|
угол тангажа +/- 1,5°
|
|||||||||
|
угол крена +/- 1,5°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
взлетная дистанция: +/- 7,5% или +/- 30 м (100 футов)
|
|||||||||
|
Для уровня адекватности R:
|
+
|
+
|
|||||||
|
воздушная скорость +/- 5,6 км/ч (3 уз)
|
|||||||||
|
высота +/- 6,1 м (20 футов)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа +/- 2,5°
|
|||||||||
|
угол крена +/- 2°
курс +/- 2°
|
|||||||||
|
взлетная дистанция: +/- 7,5% или +/- 3 0 м (100 футов)
|
|||||||||
|
1.c
|
4) Отрыв от земли и переход в режим висения
|
Крутящий момент +/- 5%
|
На земле
|
+
|
+
|
+
|
Регистрация маневра, начиная с работы на земле с рычагом управления общим шагом на нижнем упоре до установившегося висения в зоне влияния земли
|
||
|
угол тангажа +/- 2°
|
С включенной или выключенной, системой повышения устойчивости
|
||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 3°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
1.d
|
Режим висения
|
Для уровней адекватности S и R:
|
В зоне влияния земли
|
+
|
+
|
+
|
+
|
+
|
С облегченной и максимальной общей взлетной массой
|
|
крутящий момент +/- 3%
|
Вне зоны влияния земли
|
Необходимо проведение испытаний на 4 режимах:
10%, 30% и 70% высоты от диаметра НВ в зоне влияния земли;
более 150% высоты от диаметра ротора НВ вне зоны влияния земли
|
|||||||
|
угол тангажа +/- 1,5°
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
угол крена +/- 1,5°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 5%
|
Могут быть представлены векторы мгновенного состояния
|
||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
положение педалей путевого управления +/- 5%
|
|||||||||
|
общий шаг НВ +/- 5%
|
|||||||||
|
Для уровня адекватности G:
|
Необходимо проведение испытаний на 2 режимах:
в зоне влияния земли;
вне зоны влияния земли
|
||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
общий шаг НВ м 5%
|
Могут быть представлены векторы мгновенного состояния
|
||||||||
|
1.e
|
Вертикальный набор высоты
|
Вертикальная скорость +/- 0,5 м/с (100 фут/мин) или +/- 10%
|
Вне зоны влияния земли
С включенной и выключенной системой повышения устойчивости
|
+
|
+
|
+
|
+
|
+
|
С облегченной и максимальной взлетной массой.
Могут быть представлены векторы мгновенного состояния
|
|
положение педалей путевого управления +/- 5%
|
|||||||||
|
общий шаг НВ +/- 5%
|
|||||||||
|
1.f
|
Горизонтальный полет. Летно-технические характеристики и балансировочные положения рычагов управления
|
Для уровня адекватности S:
|
Установившийся крейсерский режим полета
|
+
|
+
|
+
|
Могут быть представлены векторы мгновенного состояния.
Результаты испытаний должны представляться в виде графика зависимости от скорости
|
||
|
Крутящий момент +/- 3%
|
|||||||||
|
угол тангажа +/- 1,5°
|
С включенной или выключенной системой повышения устойчивости
|
Две комбинации общей взлетной массы/центровки и для каждой комбинации необходимо несколько значений скоростей от VH, до VMAX в диапазоне режимов полета
|
|||||||
|
угол скольжения +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
положение педалей путевого управления +/- 5%
|
|||||||||
|
общий шаг НВ +/- 5%
|
|||||||||
|
Для уровня адекватности R: допуски см. выше
|
+
|
+
|
Совпадение значений угла скольжения необходимо только для оценки повторяемости и только при проведении дальнейших периодических оценок
|
||||||
|
1.g
|
Набор высоты. Летно-технические характеристики и балансировочные положения рычагов управления
|
Вертикальная скорость +/- 0,5 м/с (100 фут/мин) или +/- 10%
|
Все двигатели работают.
Один неработающий двигатель.
С включенной или выключенной системой повышения устойчивости
|
+
|
+
|
+
|
+
|
+
|
Для двух комбинаций полетной массы/центровки
|
|
угол тангажа +/- 1,5°
|
Должно выдерживаться соответствие мощности двигателей рассматриваемому режиму набора высоты. Может быть представлен вектор мгновенного состояния
|
||||||||
|
угол бокового скольжения +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 5%
|
Допуски для скорости необходимы только при изменении параметров по времени
|
||||||||
|
поперечное отклонение ручки управления циклическим шагом м 5%
|
Для уровней адекватности R и S (типы тренажеров I - V):
|
||||||||
|
положение педалей путевого управления +/- 5%
|
полученные значения вертикальной скорости тренажера не могут быть меньше соответствующих значений, указанных в РЛЭ вертолета
|
||||||||
|
общий шаг НВ +/- 5%
|
Для уровня адекватности R (типы тренажеров I - II):
|
||||||||
|
воздушная скорость +/- 5,6 км/ч (3 уз)
|
Совпадение значений угла скольжения необходимо только для оценки повторяемости и при периодических оценках
|
||||||||
|
1.h
|
Снижение
|
||||||||
|
1.h
|
1) Снижение. Летно-технические характеристики и балансировочные положения рычагов управления
|
Крутящий момент +/- 3%
|
Снижение с работающим двигателем
|
+
|
+
|
+
|
+
|
+
|
Для двух комбинаций полетной массы/центровки
|
|
угол тангажа +/- 1,5°
|
С включенной или выключенной системой повышения устойчивости
|
Могут быть представлены векторы мгновенного состояния
|
|||||||
|
угол бокового скольжения +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 5%
|
Должно выдерживаться соответствие мощности двигателей рассматриваемому режиму набора высоты
|
||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%
|
Допуски для скорости необходимы только при изменении параметров по времени
|
||||||||
|
положение педалей путевого управления +/- 5%
|
Для уровня адекватности R (типы тренажеров I и II):
|
||||||||
|
общий шаг НВ +/- 5%
|
Совпадение значений угла скольжения необходимо только для оценки повторяемости и при периодических оценках
|
||||||||
|
воздушная скорость +/- 5,6 км/ч (3 уз)
|
|||||||||
|
1.h
|
2) Летно-технические характеристики авторотации и балансировочные положения рычагов управления
|
Вертикальная скорость +/- 0,5 м/с (100 фут/мин) или +/- 10%
|
Установившееся снижение
|
+
|
+
|
+
|
+
|
+
|
Для двух комбинаций полетной массы и центровки
|
|
частота вращения НВ +/- 1,5%
|
С включенной или выключенной системой повышения устойчивости
|
Допуск на частоту вращения НВ используется только в том случае, если ручка общего шага полностью выпущена (находится на нижнем упоре)
|
|||||||
|
угол тангажа +/- 1,5°
|
|||||||||
|
угол скольжения +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом м 5%
|
Скорость варьируется от минимального значения вертикальной скорости снижения до, как минимум, скорости максимальной дальности планирования или до максимально разрешенной скорости полета с неработающим двигателем (которое из значений меньше)
|
||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
положение педалей путевого управления +/- 5%
|
Могут быть представлены векторы мгновенного состояния
Для уровня адекватности R (типы тренажеров I и II):
|
||||||||
|
общий шаг НВ +/- 5%
|
Совпадение значений угла скольжения необходимо только для оценки повторяемости и при периодических оценках
|
||||||||
|
1.i
|
Вход в режим авторотации (режим самовращения несущего винта (далее - РСНВ))
|
Для уровня адекватности S:
|
Крейсерский режим полета и набор высоты
|
+
|
+
|
+
|
Изменения параметров по времени от момента резкого уменьшения мощности двигателей до малого газа и вплоть до достижения установившегося значения скорости снижения на РСНВ и NR
|
||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 3%
|
|||||||||
|
угол тангажа +/- 2°
|
Для крейсерского режима полета должны представляться данные для режима больших скоростей полета. Для режима набора высоты должны представляться данные о максимальной воздушной скорости набора высоты при максимальной мощности двигателей на максимальном продолжительном режиме или близком к нему значении
|
||||||||
|
угол крена +/- 3°
|
|||||||||
|
курс +/- 5°
|
|||||||||
|
воздушная скорость +/- 9.3 км/ч (5 уз)
|
|||||||||
|
высота +/- 6,1 м (20 футов)
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
Для уровня адекватности R:
|
Крейсерский режим полета и набор высоты
|
+
|
+
|
||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 3%
|
|||||||||
|
угол тангажа +/- 2°
|
|||||||||
|
угол крена +/- 3°
|
|||||||||
|
курс +/- 5°
|
|||||||||
|
воздушная скорость +/- 9.3 км/ч (5 уз)
|
|||||||||
|
высота +/- 6,1 м (20 футов)
|
|||||||||
|
1.j
|
Посадка
|
В случае, когда диапазон скоростей в перечисленных ниже испытаниях менее 74 км/ч (40 уз), соответствующие допуски по воздушной скорости могут применяться соответственно как к воздушной скорости, так и к путевой скорости
|
|||||||
|
Вместо относительной высоты может быть использована абсолютная высота
|
|||||||||
|
1.j
|
1) Со всеми работающими двигателями
|
Для уровня адекватности S:
|
Заход на посадку до режима висения
|
+
|
+
|
+
|
Изменения параметров по времени при выполнении схемы захода на посадку и посадки до режима висения в зоне влияния земли для соответствующего имитируемого вертолета
|
||
|
воздушная скорость +/- 5.6 км/ч (3 уз)
|
|||||||||
|
высота м 6,1 м (20 футов)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа +/- 1,5°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
Для уровня адекватности R:
|
+
|
+
|
Изменения параметров по времени при выполнении схемы захода на посадку и посадки до режима висения в зоне влияния земли для соответствующей группы моделируемых вертолетов
|
||||||
|
воздушная скорость +/- 5.6 км/ч (3 уз)
высота +/- 6,1 м (20 футов)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
угол тангажа +/- 2,5°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
1.j
|
2) С одним неработающим двигателем
|
Для уровня адекватности S:
|
Заход на посадку и посадка
|
+
|
+
|
+
|
Включая данные для выполнения захода на посадку и посадки для соответствующего моделируемого вертолета
|
||
|
воздушная скорость м 5.6 км/ч (3 уз)
высота +/- 6,1 м (20 футов)
|
Испытание заканчивается, когда все опоры шасси находятся на земле
|
||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа +/- 1,5°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/-2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
Для уровня адекватности R:
|
+
|
+
|
Включая данные для выполнения захода на посадку и посадки соответствующей группы моделируемых вертолетов
|
||||||
|
воздушная скорость +/- 5.6 км/ч (3 уз)
высота +/- 6,1 м (20 футов)
|
Испытание заканчивается, когда первая опора шасси касается земли
|
||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа +/- 2,5°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
1.j
|
3) Прерванная посадка/уход на второй круг
|
Для уровня адекватности S:
|
Заход на посадку с одним неработающим двигателем
|
+
|
+
|
+
|
Испытание проводится для демонстрации выполнения маневра ухода на второй круг, который выполняется при стабилизированном заходе на посадку в случае отказа одного двигателя или при появлении динамических неисправностей двигателя во время захода на посадку
|
||
|
воздушная скорость +/- 5.6 км/ч (3 уз)
высота +/- 6,1 м (20 футов)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа м 1,5°
|
|||||||||
|
угол крена м 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
Для уровня адекватности R:
|
+
|
+
|
|||||||
|
воздушная скорость +/- 5.6 км/ч (3 уз)
высота +/- 6,1 м (20 фут)
|
|||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
частота вращения НВ +/- 1,5%
|
|||||||||
|
угол тангажа +/- 2,5°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
1.j
|
4) Посадка на режиме авторотации (РСНВ)
|
Воздушная скорость +/- 5.6 км/ч (3 уз)
крутящий момент +/- 3%
|
Заход на посадку и касание
|
+
|
+
|
+
|
Изменения параметров по времени из режима установившегося снижения на РСНВ до торможения и приземления
|
||
|
частота вращения НВ +/- 3%
|
Если изготовитель вертолета не предоставил для проведения этого испытания данные летных испытаний, содержащие все необходимые параметры выполнения посадки с неработающим двигателем, а квалифицированный летно-испытательный персонал для получения таких данных отсутствует, то эксплуатант тренажера может согласовать с уполномоченным органом решение о возможности применения альтернативных средств испытаний
|
||||||||
|
высота +/- 6,1 м (20 футов)
|
|||||||||
|
угол тангажа +/- 2°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 5°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
Применение альтернативных методик для получения таких данных зависит от вертолета, а также от персонала и используемого оборудования для регистрации данных, их обработки и расшифровки. К таким альтернативным методикам относятся следующие:
моделирование выравнивания на РСНВ и уменьшения скорости снижения по высоте; отключение двигателя с последующим заходом на посадку на РСНВ и выравниванием
|
||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
1.j
|
5) Переход от режима висения к снижению до точки приземления
|
Крутящий момент +/- 5%
|
Висение в зоне влияния земли
|
+
|
+
|
+
|
Регистрация маневра от висения в зоне влияния земли до касания, завершающегося полностью выпущенным положением ручки управления общего шага
|
||
|
угол тангажа +/- 2°
|
С включенной или выключенной системой повышения устойчивости
|
||||||||
|
угол крена +/- 2°
курс м 3°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 10%
|
|||||||||
|
положение педалей путевого управления +/- 10%
|
|||||||||
|
общий шаг НВ +/- 10%
|
|||||||||
|
1.k
|
Ускорение в режиме горизонтального полета
|
Для уровня адекватности S:
воздушная скорость +/- 5.6 км/ч (3 уз)
|
Крейсерский режим полета
|
+
|
+
|
+
|
Регистрация скоординированного ускорения в режиме горизонтального полета, вызванного однократным увеличением мощности в начале выполнения маневра (не непрерывное увеличение), в минимальном диапазоне скоростей с возрастанием от скорости от VMAX до максимальной воздушной скорости в заданном диапазоне
|
||
|
Продольные и боковые отклонения ручек управления, отклонение педалей путевого управления и ручки управления общим шагом +/- 10%
|
С включенной или выключенной системой повышения устойчивости
|
||||||||
|
крутящий момент +/- 3%
|
|||||||||
|
угол тангажа +/- 2°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс +/- 2°
|
|||||||||
|
Для уровня адекватности R:
|
+
|
+
|
|||||||
|
воздушная скорость +/- 5.6 км/ч (3 уз)
крутящий момент +/- 3%
|
|||||||||
|
угол тангажа +/- 2°
|
|||||||||
|
угол крена +/- 2°
|
|||||||||
|
курс м 2°
|
|||||||||
|
2.
|
ХАРАКТЕРИСТИКИ УПРАВЛЯЕМОСТИ
|
||||||||
|
2.a.
|
Механические характеристики системы управления
|
||||||||
|
2.a.
|
1) Управление циклическим шагом
|
Усилие, которое необходимо приложить пилоту к основным рычагам управления для того, чтобы началось перемещение соответствующего рычага (далее - усилие страгивания) +/- 0,111 даН
(0,25 фунт-силы) или +/- 25%
|
На земле
|
+
|
+
|
+
|
+
|
+
|
Регистрация непрерываемых перемещений рычагов управления до их крайних положений (такое испытание не требуется, если используются аппаратные модульные контроллеры ВС)
|
|
Статические режимы с включенной гидравлической системой под давлением (если применимо).
|
|||||||||
|
Может использоваться дополнительная гидравлическая система высокого давления.
|
Для получения данных летных испытаний для этого испытания не требуется включения сцепления/вращения НВ
|
||||||||
|
Усилие перемещения +/- 0,222 даН (0,5 фунт-силы) или +/- 10%
|
Триммер включен и выключен
|
||||||||
|
Без влияния трения
|
|||||||||
|
С включенной и выключенной системой повышения устойчивости (если применимо)
|
|||||||||
|
2.a.
|
2) Общий шаг/педали путевого управления
|
Усилие страгивания
+/- 0,222 даН
(0,5 фунт-силы) или +/- 25%
|
На земле
|
+
|
+
|
+
|
+
|
+
|
Регистрация непрерываемых перемещений рычагов управления до их крайних положений
|
|
Статические режимы с включенной гидравлической системой под давлением (если применимо). Может использоваться дополнительная гидравлическая система высокого давления.
|
|||||||||
|
Усилие перемещения +/-
0,445 даН
(1,0 фунт-силы) или +/- 10%
|
Для получения данных летных испытаний для этого испытания не требуется включения сцепления/вращения НВ
|
||||||||
|
Триммер включен и выключен
|
|||||||||
|
Без влияния трения.
|
|||||||||
|
С включенной и выключенной повышения устойчивости (если применимо)
|
|||||||||
|
2.a.
|
3) Зависимость усилия от положения педали тормоза
|
Усилие +/- 2,224 даН
(5 фунт-силы) или +/- 10%
|
На земле
|
+
|
+
|
+
|
+
|
+
|
Для подтверждения соответствия могут использоваться результаты моделирования, полученные на компьютере тренажера
|
|
Статические режимы
|
|||||||||
|
Если тормозная система вертолета является независимой, то допуски следует применять только при страгивании и максимальном перемещении педали
|
|||||||||
|
2.a.
|
4) Скорость триммирования (все соответствующие системы)
|
Скорость триммирования
+/- 10%
|
На земле
|
+
|
+
|
+
|
+
|
+
|
Допуск применяется к зарегистрированной скорости триммирования
|
|
Статические режимы
|
|||||||||
|
Триммер вкл.
|
|||||||||
|
Без влияния трения
|
|||||||||
|
2.a.
|
5) Динамические характеристики системы управления (по всем осям)
|
Для систем с недостаточным демпфированием (см. рис 1 в конце таблицы):
T(P0) +/- 10% от P0 или +/- 0,05 с
|
На земле
|
+
|
+
|
+
|
Результаты должны регистрироваться для нормального перемещения рычага управления в обоих направлениях по каждой оси
|
||
|
Статические режимы для необратимых систем управления полетом
|
|||||||||
|
T(P1) +/- 20% от P1 или +/- 0,05 с
|
Триммер включен
|
||||||||
|
T(P2) +/- 30% от P2 или +/- 0,05 с
|
Без влияния трения
|
||||||||
|
T(Pn) +/- 10 * (n + 1)% от Pn или +/- 0,05 с
|
|||||||||
|
T(An) +/- 10% от Amax где Amax - максимальная амплитуда первого заброса (выхода за пределы значений) или +/- 0,5% от полного отклонения рычага управления (крайние положения)
|
|||||||||
|
T(Ad) +/- 5% от Ad = граница допуска или +/- 0,5% от полного отклонения рычага управления = граница допуска
|
|||||||||
|
Колебания в пределах границы допуска не рассматриваются и к ним не применяются допуски +/- 1 значительный заброс (как минимум 1 значительный выброс).
Установившийся режим должен быть в пределах границы допуска. Следующий допуск применяется только к системам с избыточным и критическим демпфированием (см. рис. 2 после таблицы):
T(P0) +/- 10% от P0 или +/- 0,05 с
|
|||||||||
|
2.b.
|
Характеристики управляемости при малых скоростях полета
|
||||||||
|
1) Балансировочные положения рычагов управления
|
Крутящий момент +/- 3%
|
Поступательный полет
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты для несколько приращений скорости полета до предельных значений воздушной скорости при поступательном полете вперед до скорости 83 км/ч (45 уз) (как минимум 4 значения для горизонтального полета)
|
|
|
угол тангажа +/- 1,5°
|
Полет в зоне влияния земли
|
||||||||
|
угол крена +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 5%.
|
Перемещения вбок, назад и прямолинейный горизонтальный полет
|
Может быть представлена серия векторов мгновенного состояния
|
|||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%.
|
С включенной или выключенной системой повышения устойчивости
|
Рекомендуется представлять результаты испытаний в виде графика зависимостей параметров от скорости
|
|||||||
|
положение педалей путевого управления +/- 5%
|
|||||||||
|
положение рычага управления общим шагом +/- 5%
|
|||||||||
|
2) Критический азимут (или азимут, соответствующий минимальному запасу управления)
|
Крутящий момент +/- 3%
|
Режим неподвижного висения
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты для трех относительных направлений ветра (в том числе и наиболее критический случай) в критическом квадранте
|
|
|
угол тангажа +/- 1,5°
|
С включенной или выключенной системой повышения устойчивости
|
Требуется ЗОС, чтобы на основе конструкции вертолета и данных РЛЭ или данных летных испытаний определить, как следует представлять результаты испытаний, демонстрирующие минимальный запас управления
|
|||||||
|
угол крена +/- 2°
|
|||||||||
|
продольное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
поперечное отклонение ручки управления циклическим шагом +/- 5%
|
|||||||||
|
положение педалей путевого управления +/- 5%
|
|||||||||
|
положение рычага управления общим шагом +/- 5%
|
|||||||||
|
3) Реакция на перемещение пилотом соответствующего рычага управления из нейтрального положения в одном направлении (вперед, назад, вправо или влево, вверх или вниз) до упора, непрерывное перемещение в обратном направлении через нейтральное положение до противоположного упора и затем возвращение его в первоначальное положение (далее - управляющее воздействие)
|
Регистрируются данные ступенчатых управляющих воздействий в канале, подвергаемом проверке. Реакция вертолета по другим осям должна демонстрировать правильное направление
|
||||||||
|
Данное кратковременное испытание может проводиться в зоне влияния земли для лучшего визуального представления.
Испытания реакции рычагов управления включают в себя четыре испытания, указанные ниже в пунктах 3 a) - 3 d)
|
|||||||||
|
3a) Продольное
|
Угловая скорость тангажа
+/- 10% или +/- 2°/с
|
Висение
|
+
|
+
|
+
|
Изменение углового положения определяется как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия
|
|||
|
изменение угла тангажа
+/-10% или +/-1,5°
|
С включенной и выключенной, системой повышения устойчивости
|
||||||||
|
3b) Поперечное
|
Угловая скорость крена +/- 10% или +/- 3°/с
|
Висение
|
+
|
+
|
+
|
Изменение углового положения определяется как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия
|
|||
|
изменение угла крена +/- 10% или +/- 3°
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
3c) Путевое
|
Угловая скорость рысканья
+/- 10% или +/- 2°/с
|
Висение
|
+
|
+
|
+
|
Изменение углового положения определяется как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия
|
|||
|
изменение курсового угла
+/- 10% или +/- 2°
|
С включенной и выключенной системой повышения устойчивости. В обоих направлениях
|
||||||||
|
3d) Вертикальное
|
Нормальное ускорение +/- 0,1 g.
|
Висение
|
+
|
+
|
+
|
||||
|
вертикальная скорость +/- 10%
или
+/- 0,50 м/с
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
(100 фут/мин)
|
|||||||||
|
2.c.
|
Характеристики продольной управляемости
|
||||||||
|
1) Реакция на управляющее воздействие
|
Угловая скорость тангажа
+/- 10% или +/- 2°/сА
|
Крейсерский режим полета.
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты для двух скоростей крейсерского полета, одна из которых соответствует минимальной потребной мощности. Регистрируются результаты ступенчатого управляющего воздействия в канале, подвергаемом проверке. Реакция по другим осям должна демонстрировать правильное направление
Изменение углового положения определяется как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия
|
|
|
изменение угла тангажа +/- 10% или +/- 1.5°
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
2) Статическая устойчивость
|
Продольное отклонение ручки управления циклическим шагом от балансировочного положения: +/- 10% или +/- 6.3 мм (0,25 дюйма);
|
Крейсерский режим полета или набор высоты
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты, как минимум, для двух скоростей, относительно каждой стороны балансировочной скорости, взятой в качестве точки отсчета
|
|
|
Режим авторотации
|
|||||||||
|
или
|
С включенной и выключенной системой повышения устойчивости.
|
Может быть представлена серия векторов мгновенного состояния
|
|||||||
|
Изменение продольного усилия на ручке управления циклическим шагом от балансировочного положения: +/- 0,222 даН (0,5 фунт-силы) или +/- 10%
|
|||||||||
|
Условия с включенной и выключенной системой повышения устойчивости необходимы, если система функционального дополнения включает регулирование воздушной скорости
|
|||||||||
|
3) Динамическая устойчивость
|
Испытания характеристик динамической устойчивости включают два вида испытаний, описание которых приведено ниже в пунктах 3 a) и 3 b)
|
||||||||
|
3a) Длиннопериодическая реакция
|
+/- 10% расчетного периода
|
Крейсерский режим полета
|
+
|
+
|
+
|
+
|
+
|
Для периодических реакций регистрируются результаты трех полных циклов колебаний (6 забросов после завершения управляющего воздействия) или в течение времени, достаточного для оценки времени уменьшения амплитуды колебаний вдвое или ее удвоения, в зависимости от того, какое значение из двух меньше
|
|
|
+/- 10% расчетного времени
|
С выключенной системой повышения устойчивости
|
||||||||
|
уменьшения вдвое или удвоения амплитуды колебаний, или +/- 0,02 коэффициента демпфирования
|
|||||||||
|
Для непериодических реакций динамика изменения по времени должна совпадать в течение периода 20 с, после освобождения рычагов управления в пределах изменения угла тангажа +/- 20% или +/- 3° и 9,3 км/ч (+/- 5 уз) воздушной скорости
|
|||||||||
|
3b) Короткопериодическая реакция
|
Угол тангажа +/- 1,5°
или угловая скорость тангажа +/- 2°/с
|
Крейсерский режим полета или набор высоты
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты, по крайней мере, для двух воздушных скоростей. Обычно это испытание проводится при введении двойного управляющего импульса с частотой, характерной для данного вертолета. Однако, хотя для испытаний с выключенной системой повышения устойчивости предпочтительно использование двойных импульсов, а не единичных, когда короткопериодическая реакция определяется характеристиками первого порядка или апериодическими характеристиками, тем не менее, использование импульсных воздействий продольного движения может обеспечить более согласованную реакцию
|
|
|
нормальное ускорение +/- 0,1 g
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
Двойной (продольный) управляющий импульс может быть создан путем резкого перемещения ручки управления тангажом вначале на себя и, удержав входное воздействие в течение 5 с, затем резко переместив ручку управления от себя и, удержав входное воздействие в течение 5 с, отпустить ручку управления до занятия ею нейтрального положения. Входные воздействия должны быть достаточно большими, чтобы обеспечить коэффициент перегрузки +/- 0,2 g и/или изменение положения по тангажу от +/- 5° до +/- 15°
|
|||||||||
|
Апериодическую реакцию на ступенчатые команды демонстрирует система, которая быстро достигает состояния устойчивости и удерживает это состояние с минимальными забросами
|
|||||||||
|
4) Устойчивость при выполнении маневра
|
Продольное отклонение ручки управления от балансировочного положения: +/- 10% или +/- 6.3 мм (0,25 дюйма)
|
Крейсерский режим полета или набор высоты
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты для двух воздушных скоростей, в том числе для скорости, соответствующей минимальной потребной мощности. Для каждого значения скорости должны представляться результаты выполнения разворотов с углами крена примерно 30° и 45°
|
|
|
С включенной или выключенной системой повышения устойчивости
|
|||||||||
|
или
|
Левые и правые развороты
|
Для необратимых систем усилия могут указываться в виде графика зависимости
|
|||||||
|
изменение продольного усилия на ручке управления от балансировочного положения:
+/- 0,222 даН
(0,5 фунт-силы) или
+/- 10%
|
Может быть представлена серия векторов мгновенного состояния
|
||||||||
|
2.d.
|
Характеристики поперечной и путевой управляемости
|
||||||||
|
2.d.
|
1) Реакция на управляющее воздействие
|
Испытания реакции на управляющее воздействие включают два испытания, описание которых приведено ниже в пунктах 1a) и 1 b)
|
|||||||
|
2.d.
|
1a) Поперечное
|
Угловая скорость крена +/- 10%
или +/- 3°/с
|
Крейсерский режим полета
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты, по крайней мере, для двух воздушных скоростей, одна из которых соответствует или близка к значению воздушной скорости при минимальной потребной мощности. Регистрируются результаты ступенчатого управляющего воздействия по испытуемой оси. Реакция по другим осям должна демонстрировать правильное направление
|
|
изменение угла крена +/- 10%
или +/- 3°
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
Изменение углового положения определяется как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия
|
|||||||||
|
2.d.
|
1b) Путевое
|
Угловая скорость рыскания +/- 10% или +/- 2°/с
|
Крейсерский режим полета
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты, по крайней мере, для двух воздушных скоростей, одна из которых соответствует или близка к значению воздушной скорости при минимальной потребной мощности. Регистрируются результаты ступенчатого управляющего воздействия по испытуемой оси. Реакция по другим осям должна демонстрировать правильное направление.
Изменение курса определяется как изменение по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия
|
|
изменение курсового угла +/- 10% или +/- 2°
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
2.d.
|
2) Путевая статическая устойчивость
|
Положение по крену +/- 1,5° вертикальная скорость +/- 10% или +/- 0,50 м/с (100 фут/мин)
|
Набор высоты или снижение
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты, по крайней мере, для двух значений углов скольжения влево и вправо от балансировочного положения
Силы могут быть приведены как зависимости для необратимых систем
|
|
Изменение положения ручки управления циклическим шагом в поперечном направлении относительно балансировочного положения:
+/- 10% или
+/- 6,3 мм (0,25 дюйма), или изменение усилия на ручке управления циклическим шагом в поперечном
|
С включенной и выключенной системой повышения устойчивости
|
Может быть представлена серия векторов мгновенного состояния
|
|||||||
|
Это испытание проводится как проверка влияния скольжения при фиксированном курсовом угле и при фиксированном положении рычага управления общим шагом
|
|||||||||
|
направлении: +/- 10% или
+/- 0,222 даН
(0,5 фунт-силы)
|
|||||||||
|
Изменение положения педалей
путевого управления:
+/- 10% или
+/- 6,3 мм (0,25 дюйма) или изменение усилия на педалях относительно балансировочного положения:
+/- 10% или +/- 0,444 даН
(1 фунт-силы)
|
|||||||||
|
Изменение положения ручки управления в продольном направлении циклическим шагом от балансировочного положения:
+/- 10% или +/- 6,3 мм (0,25 дюйма) или изменение усилия на ручке управления циклическим шагом относительно балансировочного положения: +/- 10% или +/- 0,222 даН (0,5 фунт-силы)
|
|||||||||
|
2.d.
|
3) Динамические характеристики поперечной и путевой устойчивости
|
Испытания динамических характеристик поперечной и путевой устойчивости включают в себя три испытания, описание которых приведено ниже в пунктах. 3a) - 3c)
|
|||||||
|
2.d.
|
3a) Колебания в поперечной плоскости и по курсу
|
+/- 0,5 с или +/- 10% от периода колебаний
+/- 10% времени уменьшения вдвое или удвоения амплитуды колебаний или +/- 0,02 коэффициента демпфирования
|
Крейсерский режим полета или набор высоты
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты, по крайней мере, для двух значений воздушной скорости. Испытание инициируется с помощью двойного входного воздействия на ручку циклического шага в поперечном направлении или на педали путевого управления
|
|
С включенной или выключенной системой повышения устойчивости
|
|||||||||
|
+/- 20% или +/- 1 с от разницы
|
Регистрируются результаты 6 полных циклов колебаний (12 забросов после завершения управляющего воздействия) или количества циклов, достаточного для оценки времени уменьшения вдвое или удвоения амплитуды колебаний, в зависимости от того, какая из величин меньше.
Испытание может быть прекращено до истечения 20 с, если пилот, проводящий испытание, считает, что результаты начинают расходиться, причем этот процесс носит неконтролируемый характер
|
||||||||
|
времени достижения максимальных значений углов крена и скольжения
|
|||||||||
|
Для непериодических реакций динамика изменения параметров по времени должна быть налажена в расчете на период 20 с после освобождения рычагов управления в диапазоне:
+/- 5°/с по угловой скорости крена или +/- 5° по изменению положения по крену; +/- 4°/с по угловой скорости рыскания или +/- 4° по курсу
|
|||||||||
|
2.d.
|
3b) Спиральная устойчивость
|
Правильное направление и изменение угла крена +/- 2° или +/- 10% в течение 20 с
|
Крейсерский режим полета или набор высоты
|
+
|
+
|
+
|
+
|
+
|
Регистрируются результаты разворотов в течение 20 с после освобождения от управляющих воздействий только педалей или только рычага управления циклическим шагом
|
|
При использовании альтернативного метода испытаний:
|
С включенной или выключенной системой повышения устойчивости
|
Регистрируются результаты разворотов в обоих направлениях
|
|||||||
|
Изменение положения ручки управления циклическим шагом в поперечном направлении относительно балансировочного положения: +/- 20% или +/- 12,7 мм (0,5 дюйм)
|
Испытание завершается при нулевом угле крена, либо если пилот-испытатель считает, что угловое положение становится неконтролируемым
|
||||||||
|
Могут использоваться осредненные летные данные, полученные в результате нескольких испытаний
|
|||||||||
|
Испытание проводится в обоих направлениях
Альтернативное испытание: регистрируются результаты только входных воздействий циклического поперечного управления (без входных воздействий педалей), необходимых для поддержания угла крена приблизительно в 30° от балансировочного значения в установившемся полете
Может быть представлена серия векторов мгновенного состояния
|
|||||||||
|
2.d.
|
3c) Внутреннее/внешнее скольжение
|
Правильное направление
|
Крейсерский режим полета или набор высоты
|
+
|
+
|
+
|
+
|
+
|
Регистрируется изменение по времени параметров входа в разворот при управляющем воздействии ручки циклического шага, используя только умеренную скорость воздействия на управление циклическим шагом. Результаты регистрируются для разворотов в обоих направлениях
|
|
Неустановившийся угол скольжения +/- 2°
|
С включенной и выключенной системой повышения устойчивости
|
||||||||
|
При использовании системы повышения устойчивости должно предусматриваться применение системы координации разворота
|
|||||||||
|
3.
|
СИСТЕМА ПОДВИЖНОСТИ
|
||||||||
|
3.a.
|
Частотная характеристика
|
Как определено заявителем для квалификации тренажера
|
Неприменимо
|
+
|
+
|
Требуется проведение соответствующего испытания для демонстрации частотной характеристики
|
|||
|
3.b.
|
Проверка системы подвижности при изменении знака входного сигнала на противоположный
|
Как определено заявителем на квалификацию тренажера
|
Неприменимо
|
+
|
+
|
Требуется проведение соответствующего испытания для демонстрации частотной характеристики
|
|||
|
3.c.
|
Акселерационные эффекты
|
||||||||
|
3.d.
|
Стабильность системы подвижности
|
+/- 0,05 g от фактических линейных ускорений платформы
|
Отсутствуют
|
+
|
+
|
Данное испытание проводиться для подтверждения того, что аппаратное и программное обеспечение системы подвижности (в штатном режиме эксплуатации тренажера) работает в соответствии с уровнем, присвоенным при первоначальных квалификационных испытаниях. На основе полученной информации несложно определить изменения характеристик по сравнению с первоначальными характеристиками
|
|||
|
3.e.
|
Адекватность воспроизведения акселерационных воздействий
|
||||||||
|
3.e.
|
1) Точность воспроизведения акселерационных воздействий. Частотный критерий
|
Подлежит определению
|
На земле и в полете
|
+
|
+
|
Для системы подвижности, применяемой при обучении, должны регистрироваться в сочетании модули и фазы алгоритма воспроизведения акселерационных воздействий и движения платформы в диапазоне частот, соответствующем характеристикам моделируемого вертолета
|
|||
|
Это испытание требуется проводить только при первоначальной квалификационной оценке тренажера
|
|||||||||
|
3.e.
|
2) Адекватность воспроизведения акселерационных воздействий Критерий времени
|
Подлежит определению
|
На земле и в полете
|
+
|
+
|
||||
|
3bis
|
ВИБРАЦИИ
|
||||||||
|
3bis.a.
|
Характерные вибрации при движении
|
На земле и в полете
|
Для проверки характерных вибраций при движении, которые ощущаются в кабине экипажа, применительно к типу вертолета, требуется проведение следующих испытаний с регистрацией результатов и составление ЗОС. Результаты испытаний на вибрацию должны включать вибрации с частотой первой гармоники НВ и первой лопастной гармоники НВ
|
||||||
|
Частота первой гармоники НВ - 1/количество оборотов НВ в минуту; частота первой лопастной гармоники НВ - n/количество оборотов НВ в минуту (n - количество лопастей НВ)
|
|||||||||
|
Зарегистрированные результаты испытаний характерной тряски должны позволять проводить сравнение относительной амплитуды в зависимости от частоты
|
|||||||||
|
Требуется проводить соответствующие испытания с регистрацией их результатов, чтобы можно было провести сравнение относительных амплитуд в зависимости от частоты в продольном, поперечном и вертикальном направлениях и затем сопоставить результаты с данными вертолета
|
|||||||||
|
Допустимо проведение испытаний в установившихся режимах.
Для устройств типа III требуются только результаты эталонных испытаний.
В тех случаях, когда при первоначальной оценке используется утвержденная субъективная настройка для формирования утвержденного справочного (исходного) стандарта, во время периодических оценок необходимо применять соответствующие допуски
|
|||||||||
|
3bis.a.
|
1) На земле
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
На земле
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации находящегося на земле вертолета, все двигатели работают на режиме малого газа и полетных режимах мощности. Необходимы испытания в двух режимах:
РУД в положении малый газ и соответствующее значение числа оборотов НВ (в процентах);
РУД в положении одного из режимов полет и соответствующее значение числа оборотов НВ (в процентах)
|
||
|
3bis.a.
|
2) Висение (в зоне влияния земли)
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Висение
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации, когда вертолет находится в режиме висения в зоне влияния земли
|
||
|
3bis.a.
|
3) Висение (вне зоны влияния близости земли)
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Висение
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации, когда вертолет находится в режиме висения вне зоны влияния земли
|
||
|
3bis.a.
|
4) Штатный набор высоты
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Набор высоты
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации, когда вертолет набирает высоту в штатном режиме при штатной скорости набора высоты со всеми работающими двигателями
|
||
|
3bis.a.
|
5) Вертикальный набор высоты
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Набор высоты
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации при переходе вертолета к вертикальному набору высоту из режима висения
|
||
|
3bis.a.
|
6) Горизонтальный полет на малой скорости
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Крейсерский режим полета
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации, когда вертолет выполняет горизонтальный полете со скоростью близкой VMAX.
|
||
|
3bis.a.
|
7) Горизонтальный полет на крейсерской скорости
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (см. к испытанию 3bis.a)
|
Крейсерский режим полета
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации при выполнении вертолетом полета со штатной крейсерской скоростью
|
||
|
3bis.a.
|
8) Горизонтальный полет на высокой скорости
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Крейсерский режим полета
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации при выполнении вертолетом полета с высокой скоростью (близкой к скорости Vne или на этой скорости)
|
||
|
3bis.a.
|
9) Снижение
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Снижение
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации при снижении вертолета с нормальной тягой и штатной скоростью и со всеми работающими двигателями
|
||
|
3bis.a.
|
10) Авторотация
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Режим авторотации
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации при снижении вертолета в режиме авторотации со всеми неработающими двигателями (или, по крайней мере, на режиме малого газа), с номинальной частотой вращения НВ и рекомендованной скоростью авторотации
|
||
|
3bis.a.
|
11) Установившиеся развороты
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление (по испытанию 3bis.a))
|
Крейсерский режим полета
|
+
|
+
|
+
|
Испытание предназначено для демонстрации нормального уровня вибрации, когда вертолет выполняет устойчивые развороты с различными углами крена. Необходимо продемонстрировать, по крайней мере, два режима (для нормальной скорости разворота и с более высоким значением угла крена близким 45°, чтобы продемонстрировать влияние нагрузки диска НВ на уровень вибрации, если он присутствует)
|
||
|
3bis.b.
|
Особые условия
|
+ 3 Дб/-6 Дб или +/- 10% номинального уровня вибрации и правильное направление
|
На земле и в полете
|
+
|
+
|
Применимо к особым случаям устойчивого состояния, определяемым как имеющие особую важность для пилота или важность при обучении, или присущими конкретному типу или модели вертолета. К таким случаям относятся эффекты, связанные с опорами шасси, эффект обледенения, режим вихревого кольца, атмосферные возмущения, а также все вибрации в связи со штатным и нештатным функционированием системы несущего винта и трансмиссии
|
|||
|
Зарегистрированные результаты испытаний характерной тряски должны обеспечивать возможность сравнения относительной амплитуды в зависимости от частоты
|
|||||||||
|
Требуется ЗОС
|
|||||||||
|
Требуется проводить соответствующие испытания с регистрацией их результатов, чтобы можно было провести сравнение относительных амплитуд в зависимости от частоты в продольном, поперечном и вертикальном направлениях и затем сопоставить результаты с данными вертолета
|
|||||||||
|
Допустимо проведение испытаний в установившихся режимах
|
|||||||||
|
В тех случаях, когда при первоначальной оценке используется утвержденная субъективная настройка для формирования утвержденного справочного стандарта, во время периодических оценок необходимо применять допуски
|
|||||||||
|
Для атмосферных возмущений допускается применение универсальных моделей, которые аппроксимируют доказуемые данные летных испытаний
|
|||||||||
|
4.
|
СИСТЕМА ВИЗУАЛИЗАЦИИ
|
||||||||
|
4.a.
|
Качество визуальной картины
|
||||||||
|
4.a.1
|
Непрерывная зона обзора
|
Система визуализации, обеспечивающая одновременно каждому пилоту непрерывную зону обзора с углом, минимум, 210° по горизонтали и, минимум, 60° по вертикали
|
Неприменимо
|
+
|
+
|
+
|
+
|
Зона обзора должна измеряться с использованием визуального тестового шаблона, заполняющего всю визуальную картину (все каналы), представляющую собой матрицу из 5° квадратов
|
|
|
Учитывая центровку изображения относительно осевой линии вертолета, смещение от точки положения глаз каждого пилота не должно превышать 10°
|
Установленная настройка должна подтверждаться в ЗОС или результатами приемочных испытаний
|
||||||||
|
Ограничение в 10° может быть увеличено до 12° по практическим соображениям (по причине размера купола кабины экипажа с двойным управлением)
|
|||||||||
|
Эксплуатант тренажера должен доказать уполномоченным органом что такое изменение не повлияет на качество обучения
|
|||||||||
|
4.a.1
|
Зона обзора изображения
|
Система визуализации, обеспечивающая одновременно каждому пилоту непрерывную зону обзора с углом, минимум, 45° по горизонтали и, минимум, 30° по вертикали, если эти параметры не ограничены типом вертолета.
|
Неприменимо
|
+
|
Минимальное расстояние от точки положения глаз пилота до поверхности дисплея прямого обзора не должно быть меньше расстояния до любого прибора на передней приборной панели
|
||||
|
Зоны обзора в 30° по вертикали может быть недостаточно для обеспечения соответствия требованиям в отношении видимого участка земли (если требуется). Это должно учитываться при расчете зоны обзора
|
|||||||||
|
Принимая во внимание центровку изображения относительно осевой линии вертолета, смещение от точки положения глаз каждого пилота не должно превышать 10°
|
Ограничение в 10° может быть увеличено до 12° по практическим соображениям (по причине размера купола кабины экипажа с двойным управлением)
|
||||||||
|
Эксплуатант тренажера должен доказать уполномоченным органом, что такое изменение не повлияет на качество обучения
|
|||||||||
|
4.a.2.a.1
|
Геометрия системы визуализации.
Положение изображения
|
Для каждой точки положения глаз пилотов центр изображения должен находиться между 0° и 2° в горизонтальной плоскости с центровкой изображения относительно осевой линии вертолета и в пределах +/- 0,25° по вертикали для коллимированных дисплеев.
|
Неприменимо
|
+
|
+
|
+
|
+
|
Положение изображения следует проверять относительно осевой линии тренажера. Если в центр изображения по вертикали внесена расчетная поправка, это должно указываться в ЗОС
|
|
|
Для экранов с прямой проекцией: Для каждой точки положения глаз пилотов центр изображения должен находиться между 0° и 10° в горизонтальной плоскости с центровкой изображения относительно осевой линии вертолета и в пределах +/- 0,25° по вертикали и +/- 0,5° по горизонтали дисплеев.
|
|||||||||
|
4.a.2.a.2
|
Геометрия системы визуализации.
Абсолютная геометрия
|
В указанной минимальной зоне обзора все точки на сетке с шагом 5° должны находиться в пределах 3° расчетного положения, измеренного из точки положения глаз каждого пилота, когда изображение выровнено относительно точки положения глаз пилота
|
Неприменимо
|
+
|
+
|
+
|
+
|
В системах визуализации с зоной обзора, превышающей минимальное значение, геометрия за пределами центральной зоны не должна иметь никаких отвлекающих внимание неоднородностей.
|
|
|
4.a.2.a.3
|
Геометрия системы визуализации.
Относительная геометрия
|
Измерения относительных положений точек следует проводить через каждые 5°
|
Неприменимо
|
+
|
+
|
+
|
+
|
При проведении периодического испытания в ходе проверок рекомендуется используется простой предельный калибр
|
|
|
В зоне от -10° до самой нижней видимой точки, для каждого пилота при азимуте 15° в сторону плоскости симметрии вертолета и 0°, 30°, 60° и 85° в противоположную сторону следует проводить вертикальные измерения каждые 1° до края видимого изображения
|
|||||||||
|
Относительное положение от одной точки до другой не должно превышать:
зона 1: 0,075°/градус;
зона 2: 0,157°/градус;
зона 3: 0,2°/градус
|
|||||||||
|
4.a.2.b
|
Геометрия изображения не должна иметь отвлекающих внимания неоднородностей
|
+
|
|||||||
|
4.a.3
|
Разрешающая способность (детектирование объектов)
|
Не более 2 угловых минут
|
Неприменимо
|
+
|
+
|
+
|
+
|
Разрешающая способность демонстрируется испытанием объектов, которые занимают требуемый визуальный угол в каждом визуальном канале, используемом в картине, из точки положения глаз пилота. Объект, противолежащий глазу пилота, должен соответствовать допуску. Для испытания в горизонтальной плоскости это можно продемонстрировать с использованием разметки входной кромки ВПП. Следует также продемонстрировать такое соответствие и для испытания в вертикальной плоскости. В ЗОС противолежащие углы должны подтверждаться расчетами
|
|
|
Не более 4 угловых минут
|
+
|
||||||||
|
4.a.4
|
Размер точечного источника света
|
Не более 5 угловых минут
|
Неприменимо
|
+
|
+
|
+
|
+
|
Размер точечного источника света должен измеряться с помощью тестового шаблона, состоящего из одного ряда световых точек белого цвета, отображаемого горизонтальной и вертикальной строками. Должна предусматриваться возможность перемещения световых точек относительно точки положения глаз пилота по всем осям. В точке, в которой модуляция света в каждом визуальном канале становится заметной, следует произвести расчет для определения интервалов между световыми точками. Требуется ЗОС для указания метода испытаний и расчета
|
|
|
Не более 8 угловых минут
|
+
|
||||||||
|
4.a.5
|
Коэффициент контрастности растрового изображения поверхности
|
Не менее чем 8:1
|
Неприменимо
|
+
|
+
|
+
|
+
|
Коэффициент контрастности поверхности следует измерять с помощью растрового тестового шаблона, заполняющего все визуальное изображение (все каналы). Тестовый шаблон должен состоять из квадратов черного и белого цвета размерами не более 10° (для типов тренажера II - V)/5° (для типа I) с белым квадратом в центре каждого канала
|
|
|
Не менее чем 4:1
|
+
|
||||||||
|
Следует проводить измерения яркости белых квадратов, используя апертурный фотометр с полем зрения 1°, и вычислять среднее значение. Величина минимальной яркости белых квадратов должна составлять 7 кд/м2 (2 фут-ламберт). Аналогично проводится измерение яркости черных квадратов
|
|||||||||
|
Коэффициент контрастности составляет среднюю величину яркости белого квадрата, деленную на среднюю величину яркости черного квадрата
|
|||||||||
|
При тестировании коэффициента контрастности уровни общего освещения задней части кабины и кабины экипажа тренажера должны быть минимально возможными. Измерения следует проводить в центре квадратов, чтобы не допустить проникновения паразитного света в измерительный прибор
|
|||||||||
|
4.a.6
|
Коэффициент контрастности точечного источника света
|
Не менее чем 25:1
|
Неприменимо
|
+
|
+
|
+
|
+
|
Коэффициент контрастности точечного источника света следует измерять с помощью тестового шаблона, показывающего область более 1° площади, заполненной белыми точечными источниками света, и сравнивать с соседним фоном.
|
|
|
Не менее чем 8:1
|
+
|
||||||||
|
Модуляция точечных источников света должна быть заметной на каллиграфических системах и не заметной на растровых системах.
|
|||||||||
|
При измерении яркости фона яркий квадрат должен находиться вне зоны обзора фотометра
|
|||||||||
|
При тестировании коэффициента контрастности уровня общего освещения задней части кабины и кабины экипажа тренажера должны быть минимально возможными
|
|||||||||
|
4.a.7
|
Яркость точечного источника света
|
Не менее чем 30 кд/м2
(8,8 фут-ламберт)
|
Неприменимо
|
+
|
+
|
+
|
+
|
Точечные источники света должны воспроизводиться в виде матрицы, образующей квадрат
|
|
|
В каллиграфических системах точечные источники света должны слегка сливаться
|
|||||||||
|
На растровых системах точечные источники света должны перекрываться таким образом, чтобы квадрат был сплошным (отдельные точечные источники света не видны)
|
|||||||||
|
4.a.8
|
Яркость поверхности
|
Не менее чем 20 кд/м2
(5,8 фут-ламберт) на изображении
|
Неприменимо
|
+
|
+
|
+
|
+
|
Яркость поверхности следует измерять на белом растре, используя апертурный фотометр с полем зрения 1°
|
|
|
Точечные источники света не применяются
|
|||||||||
|
Допускается использование каллиграфических возможностей для усиления яркости растрового изображения
|
|||||||||
|
4.a.9
|
Уровень черного и последовательная контрастность
|
Интенсивность черного:
|
Неприменимо
|
+
|
+
|
+
|
+
|
Фотометр должен устанавливаться неподвижно с обзором передней центральной части каждого дисплея
|
|
|
яркость черного многоугольника - яркость фона < 0,015 кд/м2
(0,004 фут-ламберт).
|
Все проекторы должны быть выключены и в кабине создана максимально возможная темнота. Следует снять основные показания оставшегося окружающего освещения экрана
|
||||||||
|
Последовательная контрастность:
яркость белого многоугольника и яркость черного многоугольника - (яркость фона) > 2000:1
|
После этого следует включить проекторы, чтобы отобразился черный многоугольник, а затем вторично снять показания и зафиксировать различия между этими показаниями и данными об уровне окружающего освещения.
|
||||||||
|
После этого следует измерить полную яркость белого многоугольника для тестирования последовательной контрастности
|
|||||||||
|
Это испытание обычно требуется проводить только для светоклапанных проекторов.
|
|||||||||
|
Если это испытание не проводится, то следует представлять ЗОС с указанием причин
|
|||||||||
|
4.a.10
|
Размытость движения
|
Модуляция между белыми квадратами должна быть видимой с зазорами, составляющими 3 угловые минуты или меньше, при вращении шаблона со скоростью 10°/с
|
Неприменимо
|
+
|
+
|
+
|
+
|
Тестовый шаблон представляет собой решетку, состоящую из пяти квадратов самого яркого белого цвета и уменьшающихся по ширине черных зазоров между ними.
|
|
|
Диапазон ширины черных зазоров должен выходить за пределы требуемого различимого зазора выше и ниже с шагом в 1 угловую минуту
|
|||||||||
|
Ширина самых ярких белых квадратов должна быть в 4 раза больше ширины черных зазоров, чтобы избежать временных искажений
|
|||||||||
|
Шаблон вращается с требуемой скоростью.
Для проведения испытания по двум осям следует использовать два набора квадратов, один вращающийся по курсу, а второй по тангажу
|
|||||||||
|
Ряд стационарных чисел определяет размер зазоров
|
|||||||||
|
Это испытание может быть ограничено техническими возможностями визуализации. В отношении таких ограничений необходимо консультироваться с уполномоченным органом
|
|||||||||
|
Это испытание обычно требуется проводить только для светоклапанных проекторов
|
|||||||||
|
Если испытание не проводится, следует представлять ЗОС с указанием причин
|
|||||||||
|
4.a.11
|
Текстура/пятнистость (спекл-тест)
|
Контрастность текстуры должна быть < 10%
|
Неприменимо
|
+
|
+
|
+
|
+
|
Требуется ЗОС с описанием метода испытаний.
|
|
|
Обычно это испытание требуется проводить только для лазерных проекторов
|
|||||||||
|
Если испытание не проводится, следует представлять ЗОС с указанием причин
|
|||||||||
|
4.a.12
|
Уровень черного при использовании для подготовки моделируемых очков ночного видения (далее - ОНВ) (только для устройства EFVS типа 3)
|
Яркость черного многоугольника 0.001 кд/м2
(0,0003 фут-ламберт)
|
Неприменимо
|
+
|
+
|
+
|
+
|
Данное испытание следует проводить с нормально работающими проекторами обзора внекабинной обстановки. При проведении этого испытания инфракрасные проекторы должны быть выключены.
|
|
|
Если для моделирования обзора внекабинной обстановки и очков ночного видения используется только один проектор, испытание должно проводиться именно с таким проектором, работающим в режиме ОНВ с использованием соответствующих фильтров
|
|||||||||
|
Фотометр должен быть установлен неподвижно и обеспечивать обзор передней центральной части каждого дисплея
|
|||||||||
|
Все проекторы должны быть выключены и в кабине создана максимально возможная темнота. Следует снять основные показания оставшегося окружающего освещения экрана
|
|||||||||
|
После этого следует включить проекторы обзора внекабинной обстановки, чтобы отобразился черный многоугольник, а затем вторично снять показания и зафиксировать различия между этими показаниями и данными об уровне окружающего освещения
|
|||||||||
|
4.a.13
|
Яркость точечного источника при использовании для подготовки моделируемых ОНВ (только для тренажера EFVS типа 3)
|
Не менее чем 10 кд/м2
(2,9 фут-ламберт)
|
Неприменимо
|
+
|
+
|
+
|
+
|
Данное испытание следует проводить с нормально работающими ИК проекторами. При проведении этого испытания проекторы обзора внекабинной обстановки должны быть выключены
|
|
|
Если для моделирования обзора внекабинной обстановки и для работы с ОНВ используется только один проектор, испытание должно проводиться именно с этим проектором, работающим в режиме ОНВ, с использованием соответствующих фильтров
|
|||||||||
|
Точечные источники света должны быть представлены в виде матрицы, образующей квадрат
|
|||||||||
|
Для каллиграфических систем точечные источники должны слегка сливаться.
|
|||||||||
|
Для растровых систем точечные источники должны перекрываться таким образом, чтобы образованный квадрат был сплошным (не должно быть видно отдельных источников света)
|
|||||||||
|
4.b
|
Индикация на лобовом стекле
|
||||||||
|
4.b.1
|
Статическое выравнивание
|
Статическое выравнивание с представленным изображением. Оптическая ось ИЛС должна выравниваться относительно центра сферического шаблона представленного изображения. Допуск +/- 6 угловых минут
|
+
|
+
|
+
|
+
|
Требование по выравниванию относится только к пилоту, выполняющему полет
|
||
|
4.b.2
|
Индикация параметров систем вертолета
|
Должно демонстрироваться функционирование в полном объеме на всех режимах полета
|
+
|
+
|
+
|
+
|
Следует представить заявление о возможностях системы и продемонстрировать эти возможности
|
||
|
4.b.3
|
Пространственное положение вертолета согласно ИЛС по сравнению с индикатором положения тренажера (тангаж и крен по горизонту)
|
Тангаж и крен согласовываются с показаниями приборов вертолета и обзором внекабинной обстановки. Допуск +/- 1°
|
В полете
|
+
|
+
|
+
|
+
|
Требование к выравниванию относится только к пилоту, выполняющему полет
|
|
|
4.c
|
Бортовая система технического зрения с расширенными возможностями визуализации (EFVS)
|
||||||||
|
4.c.1
|
Регистрационное испытание
|
Выравнивание изображения системы EFVS и обзора внекабинной обстановки должно воспроизводить выравнивание, типичное для вертолета и типа системы
|
Точка взлета и захода на посадку на высоте 60 м (200 фут) над уровнем земли.
|
+
|
+
|
+
|
+
|
Учитываются эффекты допусков на выравнивание, указанные в испытании 4.b.1
|
|
|
4.c.2
|
Дальность видимость на ВПП и калибровка видимости при использовании системы EFVS
|
Изображение системы EFVS представляет вид с высоты 350 м (1200 футов) и дальность видимости на ВПП 1600 м (1 статутная миля), включая правильную интенсивность света
|
В полете
|
+
|
+
|
+
|
+
|
Визуальная картина в инфракрасном диапазоне, характерная для высоты 350 м (1200 футов) и дальности видимости на ВПП 1600 м (1 ст. миля)
|
|
|
Визуальная картина может быть убрана
|
|||||||||
|
4.c.3
|
Тепловой переход
|
Демонстрируются эффекты теплового изменения во время перехода от дня к ночи
|
День и ночь
|
+
|
+
|
+
|
+
|
Визуальная картина должна правильно отображать характеристики теплового изменения в период перехода от дня к ночи
|
|
|
4.d
|
Видимый участок земли
|
||||||||
|
4.d.1
|
Видимый участок земли. Это испытание проводится только для вертолетов, оборудованных системой посадки по приборам. В тех случаях, когда угол обзора прямо по курсу вниз из кабины пилотов превышает отображаемую зону обзора (нижнюю его часть), то при испытании должен использоваться угол обзора отображения вниз
|
Ближний конец: должно быть видно правильное количество огней приближения в расчетном видимом участке земли.
Дальний конец: +/- 20% от расчетного видимого участка земли.
В тренажере должны быть видны те входные огни ВПП, которые должны быть видны согласно расчетам
|
Балансировка в посадочной конфигурации на высоте колес (полозкового шасси) 30 м (100 футов) над зоной приземления ВПП на глиссаде при установке ВПП 300 м (1000 футов) или 350 м (1200 футов)
|
+
|
+
|
+
|
+
|
Это испытание предназначено для оценки факторов, влияющих на точность визуальной картины, воспроизводимой для пилота на высоте принятия решения при заходе на посадку по ILS. Эти факторы включают:
|
|
|
1) дальность видимости на ВПП
|
|||||||||
|
2) точность моделирования наклона глиссады и курсового посадочного маяка (положение и наклон) при выполнении посадки по ILS;
|
|||||||||
|
3) определенные массы, конфигурации и скорости, характерные для точки в пределах области эксплуатационных режимов нормального захода на посадку и посадки;
|
|||||||||
|
4) радиовысотомер
|
|||||||||
|
Для неопределенных по типу ВС тренажеров следует использовать угол наклона траектории, характерный для данной группы вертолетов.
|
|||||||||
|
Если используется неоднородный туман, то в расчет видимости наклонной дальности, используемой для вычисления параметров видимого участка земли, должно быть включено вертикальное изменение горизонтальной видимости и его описание
|
|||||||||
|
4.e
|
Производительность системы визуализации
|
||||||||
|
4.e.1
|
Производительность системы: день, сумерки, ночь
|
Не менее 10000 видимых текстурированных поверхностей, 5000 точечных источников света, 16 движущихся объектов
|
Неприменимо
|
+
|
+
|
+
|
+
|
Демонстрируется путем использования визуальной картины, передаваемой теми же режимами формирования изображений, которые используются для создания визуальных картин при обучении пилотов
|
|
|
Необходимые поверхности, точечные источники света и движущиеся объекты должны воспроизводиться одновременно
|
|||||||||
|
Указанная производительность должна обеспечивать воспроизведение условий в любое время дня
|
|||||||||
|
4.e.3
|
Производительность системы: день, сумерки, ночь
|
Не менее 6000 видимых текстурированных поверхностей, 1000 точечных источников света
|
Неприменимо
|
+
|
|||||
|
5.
|
СИСТЕМА ИМИТАЦИИ АКУСТИЧЕСКИХ ЭФФЕКТОВ
|
||||||||
|
5.a
|
Основные требования
|
Измерения уровней звукового давления должны производится шумомером 1 класса точности с анализатором спектра, соответствующего требованиям 1 класса точности
|
|||||||
|
Оборудование для моделирования шума в тренажерах вертолетов типов V и IV должны иметь возможность выравнивания частотной характеристики акустической системы в третьоктавных полосах частот с соответствующими допусками
|
|||||||||
|
Усилители мощности акустической системы должны обеспечивать пиковый фактор не менее 12 дБ при воспроизведении звуков с наибольшими звуковыми давлениями
|
|||||||||
|
Все измерения звукового давления на соответствие данным проверочной контрольной библиотеки для типов тренажеров IV - V в данном разделе должны проводиться в третьоктавных полосах частот в диапазоне от 20 Гц до 10 кГц.
|
|||||||||
|
Измерения следует проводить в контрольных точках, соответствующих утвержденному набору данных
|
|||||||||
|
Следует проводить измерение в месте, соответствующем утвержденному набору данных
|
|||||||||
|
Утвержденный набор данных и результаты испытаний тренажера, должны готовиться с использованием методов анализа сопоставимых данных
|
|||||||||
|
Измерения для типов тренажеров I, II и III в данном разделе производятся по уровню звука A
|
|||||||||
|
Продолжительность измерений звукового давления в контрольных точках, соответствующих утвержденному набору данных, должно быть не менее 180 с для стационарных режимов полета
|
|||||||||
|
5.a.
|
1) Готовность к запуску двигателя
|
Первоначальная оценка:
+/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБот первоначальной в любой третьоктавной полосе частот
|
На земле
|
+
|
Нормальный режим перед запуском двигателей
|
||||
|
По мере необходимости должна быть запущена ВСУ
|
|||||||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
|||||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
|
+
|
||||||||
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||
|
Периодическая оценка: различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавных полосе частот
|
|||||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц,
Периодическая оценка: +/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
2) Работа всех двигателей на нормальном режиме малого газа
a) НВ не вращается (если применимо);
b) НВ вращается
|
Первоначальная оценка: +/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/-1 дБ от первоначальной в любой третьоктавной полосе частот
|
На земле
|
+
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
||||
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц,
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в октавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в октавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
3) Нормальный режим работы всех двигателей в полете
|
Первоначальная оценка: +/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
На земле
|
+
|
Нормальный режим перед отрывом от земли
|
|||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
|||||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
4) В режиме висения:
а) в зоне влияния земли; м
б) вне зоны влияния земли
|
Первоначальная оценка: +/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Висение
|
+
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
||||
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц,
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
||||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
5) При наборе высоты
|
Первоначальная оценка: +/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Набор высоты при выполнении полета по маршруту
|
+
|
Средняя высота полета
|
||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
|||||||||
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
6) В полете на крейсерском режиме
|
Первоначальная оценка:
+/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Полет в крейсерском режиме
|
+
|
Нормальная конфигурация крейсерского полета.
|
||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
|||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
Обучение должно производиться с применением авиагарнитур
|
|||||||
|
Первоначальная оценка: +/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
7) Установившийся разворот
|
Первоначальная оценка:
+/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в треть октавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Полет в крейсерском режиме
|
+
|
Углы крена от 30° до 45°.
|
||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов
|
|||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
|
+
|
Обучение должно производиться с применением авиагарнитур
|
|||||||
|
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
|||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
8) В режиме РСНВ (авторотация)
|
Первоначальная оценка:
+/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
РСНВ в стабильном режиме снижении
|
+
|
Номинальная частота вращения НВ.
|
||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов.
|
|||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
Обучение должно производиться с применением авиагарнитур
|
|||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.a.
|
9) На конечном этапе захода на посадку
|
Первоначальная оценка:
+/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 1 дБ от первоначальной в любой третьоктавной полосе частот
|
Посадка
|
+
|
Постоянная воздушная скорость
|
||||
|
Для типов тренажеров IV и V соответствие пространственных характеристик определяется возможностями системы воспроизведения звука. Соответствие шумовых характеристик кратковременных режимов полета на фоне соответствующего основного режима и шума окружающей среды устанавливается по субъективной оценке экспертов. Обучение должно производиться с применением авиагарнитур
|
|||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 40 - 160 Гц и +/- 2.0 дБ в третьоктавных полосах частот 200 - 10000 Гц
Периодическая оценка:
различие не может превышать +/- 1.5 дБ от первоначальной в любой третьоктавной полосе частот
|
+
|
||||||||
|
Первоначальная оценка:
+/- 6.0 дБ в третьоктавных полосах частот 80 - 160 Гц и +/- 3.0 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
+/- 2.0 дБ от эквивалентного уровня звука А по сравнению с первоначальной оценкой
|
+
|
||||||||
|
5.b
|
Особые случаи
|
||||||||
|
5.b.1
|
Особые случаи продолжительностью более 300 с
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в третьоктавных полосах частот 200 - 10000 Гц.
Периодическая оценка:
различие не может превышать +/- 3 дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 1.5 дБ
|
+
|
||||||
|
Первоначальная оценка:
+/- 3.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в октавных полосах частот 200 - 10000 Гц,
Периодическая оценка:
различие не может превышать +/- 3 дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2.0 дБ
|
+
|
||||||||
|
Первоначальная оценка:
+/- 4.0 дБ в третьоктавных полосах частот 20 - 160 Гц и +/- 1.5 дБ в октавных полосах частот 200 - 10000 Гц,
Периодическая оценка:
различие не может превышать +/- 3 дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2.0 дБ
|
+
|
||||||||
|
5.b.2
|
Особые случаи продолжительностью менее 300 с
|
Оценка инструментальными методами не проводится. Соответствие устанавливается по субъективной оценке экспертов шумовых характеристик кратковременных режимов полета в особых случаях
|
Это особые случаи неустойчивого состояния, имеющие особое значение для пилота, которые важно учитывать при его обучении, или характерные для конкретного типа или модели самолета
|
||||||
|
Обучение должно производиться с применением авиагарнитур
|
|||||||||
|
5.c
|
Фоновый шум
|
||||||||
|
5.c.1
|
Проникающий шум внешних источников из помещения, где установлен тренажер (далее - фоновый шум) при выключенном оборудовании тренажера (фон 1 на схеме 1)
|
Первоначальная оценка: уровни фонового шума не должны уровней спектра фон 1, представленных на схеме 1 после таблицы.
Периодическая оценка:
Не более +/- 1 дБ в любой третьоктавной полосе по сравнению с первоначальной оценкой
|
+
|
+
|
+
|
Измерения уровней звукового давления должны производится шумомером 1 класса точности с анализатором спектра, соответствующего требованиям 1 класса точности
|
|||
|
Измерения следует проводить в контрольных точках, соответствующих утвержденному набору данных.
|
|||||||||
|
5.c.2
|
Фоновый шум при включенном оборудовании тренажера без запуска программы обучения (фон 2 на схеме 1)
|
Первоначальная оценка: уровни фонового шума не должны уровней спектра фон 2, представленных на схеме 1 после таблицы. Периодическая оценка: Не более +/- 1 дБ в любой третьоктавной полосе по сравнению с первоначальной оценкой
|
+
|
+
|
+
|
Продолжительность измерений не менее 180 с
|
|||
|
6
|
СИСТЕМНАЯ ИНТЕГРАЦИЯ
|
||||||||
|
6.a
|
Время реакции систем
|
||||||||
|
6.a.
|
Транспортная задержка
|
85 мс или менее после завершения перемещения рычага управления
|
Тангаж, крен и рыскание
|
+
|
+
|
+
|
Для каждой оси необходимо проводить одно отдельное испытание.
Если установлена система EFVS, то система EFVS должна реагировать в диапазоне +/- 30 мс от времени реакции системы визуализации, но не ранее реагирования системы подвижности
|
||
|
120 мс или менее после завершения перемещения рычага управления
|
+
|
+
|
|||||||
|
Время запаздывания, вносимое электронными элементами системы EFVS вертолета, прибавляется к 30 мс допуска перед сравнением с точкой отсчета для системы визуализации
|
|||||||||
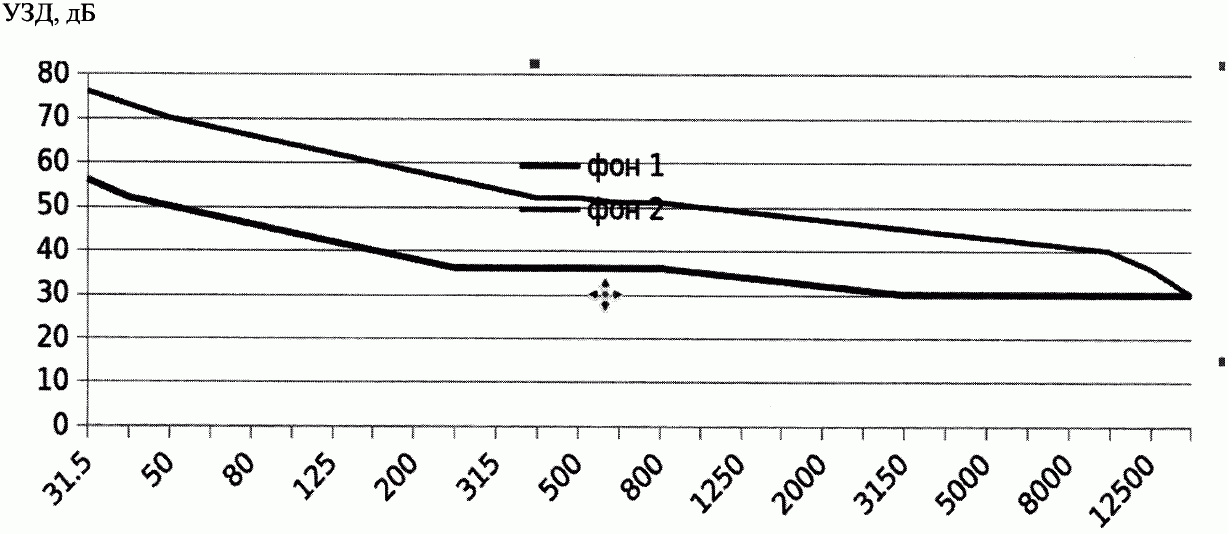
Третьоктавная полоса, Гц
Схема 1. Приемлемость уровней фонового шума определяется
разницей уровней звукового давления (УЗД) этого шума и шума
в кабине самолета в основных режимах полета, она должна
быть не менее 6 дБ в каждой третьоктавной полосе частот
моделируемого диапазона
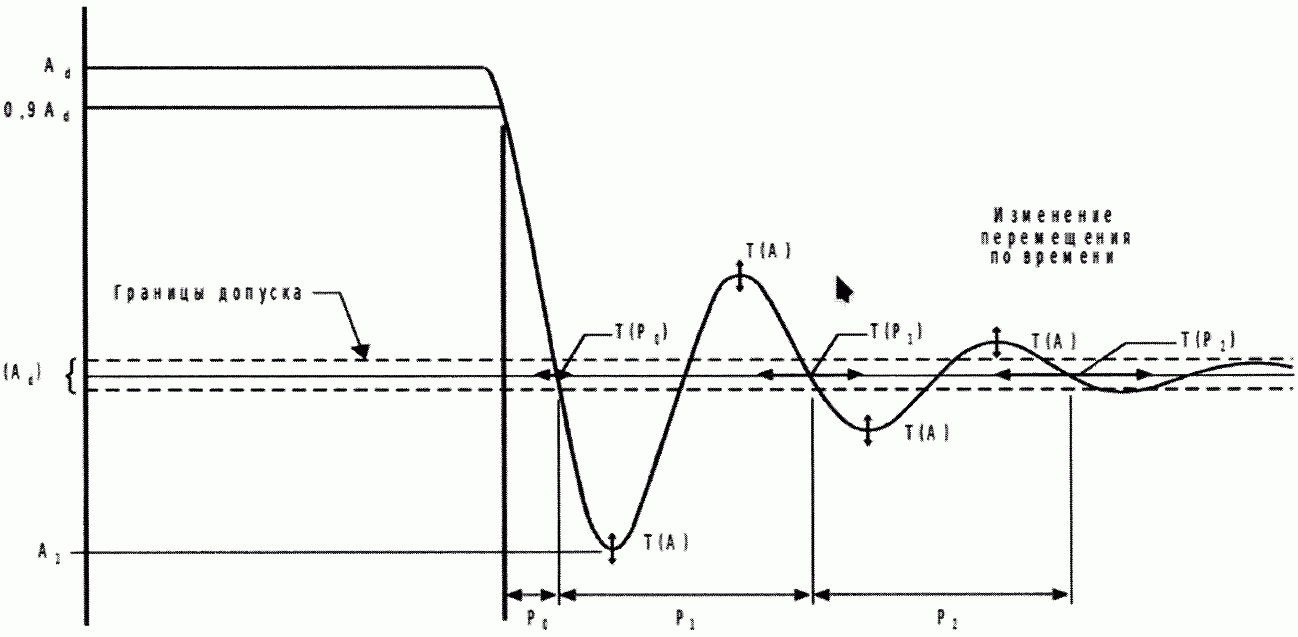
P - период
A - амплитуда
T(p) - допуск, применяемый к периоду (10% от P0, 10(n + 1)% от Pn)
T(A) - допуск, применяемый к амплитуде (0,1A1)
Схема 2. Характеристика переходного процесса
с недостаточным демпфированием
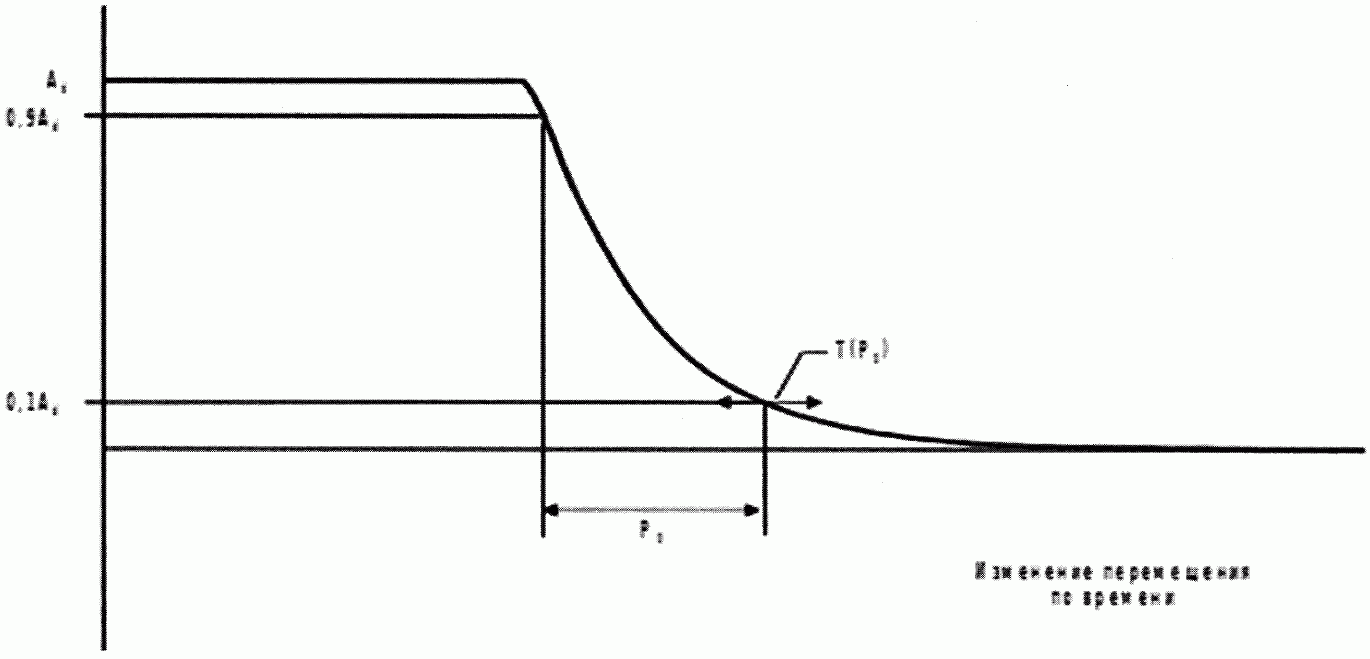
Схема 3. Характеристика переходного процесса
с критическим демпфированием
Таблица C2.
Функциональные и экспертные испытания тренажера вертолета
|
Номер
|
Функциональные и экспертные испытания
|
Тип
|
||||
|
I
|
II
|
III
|
IV
|
V
|
||
|
1
|
Подготовка к полету.
|
|||||
|
1.a
|
Функциональная проверка. Выполнить проверку функционирования всех переключателей, индикаторов, систем и оборудования на рабочих местах всех членов летного экипажа и инструкторов и определить, что:
|
|||||
|
1.a.1
|
Конструкция и функционирование оборудования кабины экипажа соответствуют имитируемому вертолету
|
+
|
+
|
+
|
||
|
1.a.2
|
Конструкция и функционирование оборудования являются типовыми для класса вертолетов.
|
+
|
+
|
|||
|
1.a.3
|
Общее освещение обеспечивает ровный уровень освещенности и не мешает экипажу тренажера
|
+
|
+
|
+
|
+
|
+
|
|
2
|
Операции на земле (предполетные)
|
|||||
|
2.a
|
Запуск ВСУ (двигателя), раскрутка двигателя
|
|||||
|
2.a.1
|
Штатный запуск
|
+
|
+
|
+
|
+
|
+
|
|
2.a.2
|
Альтернативные процедуры запуска
|
+
|
+
|
+
|
+
|
+
|
|
2.a.3
|
Особые случаи запуска и останова двигателя
|
+
|
+
|
+
|
+
|
+
|
|
2.a.4
|
Запуск НВ (срабатывание муфты сцепления и раскрутка, отключение муфты сцепления и замедление НВ)
|
|||||
|
2.a.4.a
|
Запуск НВ (срабатывание муфты сцепления и раскрутка)
|
+
|
+
|
+
|
+
|
+
|
|
2.a.4.b
|
Отключение муфты сцепления и замедление НВ (расхождение стрелок)
|
+
|
+
|
+
|
+
|
+
|
|
2.a.4.c
|
Земной резонанс (если он присущ имитируемому типу вертолета)
|
+
|
+
|
+
|
||
|
2.a.4.d
|
Обледеневшая (скользкая) поверхность
|
+
|
+
|
+
|
||
|
2.a.5
|
Проверки систем вертолета после запуска
|
+
|
+
|
+
|
+
|
+
|
|
2.b
|
Руление - на земле
|
|||||
|
2.b.1
|
Заданные значения силы трения в рычагах управления общим (циклическим) шагом НВ
|
+
|
+
|
+
|
+
|
+
|
|
2.b.2
|
Усилие, которое требуется для создания входного воздействия при рулении или управлении циклическим шагом
|
+
|
+
|
+
|
||
|
2.b.3
|
Работа тормозов (эффективность и отказы)
|
+
|
+
|
+
|
+
|
|
|
2.b.4
|
Управляемость при движении по земле
|
+
|
+
|
+
|
+
|
|
|
2.b.5
|
Руление по воде, управляемость, поплавки
|
+
|
+
|
+
|
||
|
2.b.6
|
Фиксирование носового и хвостового колеса
|
+
|
+
|
+
|
+
|
+
|
|
2.b.7
|
Минимальный радиус разворота
|
+
|
+
|
+
|
||
|
2.b.8
|
Вспомогательные средства руления, если имеется
|
+
|
+
|
+
|
||
|
2.b.9
|
Загрязненность поверхности (вода, снег, лед, песок)
|
+
|
+
|
+
|
+
|
|
|
2.b.10
|
Неровность поверхности
|
+
|
+
|
|||
|
2.b.11
|
Тип поверхности (твердая, мягкая)
|
+
|
+
|
+
|
||
|
2.c
|
Руление: висение, горизонтальный и поступательный полет
|
|||||
|
2.c.1
|
Характеристики отрыва при наличии и отсутствии ветра
|
+
|
+
|
+
|
+
|
|
|
2.c.2
|
Характеристики висения, работа двигателей и показания приборов
|
|||||
|
Режимы висения выполняются с включенной и выключенной системой повышения устойчивости, с включенной и выключенной системой стабилизации относительной высоты, с включенным и выключенным триммером ручки управления циклическим шагом
|
||||||
|
2.c.2.a
|
В зоне влияния земли
|
+
|
+
|
+
|
+
|
|
|
2.c.2.b
|
Вне зоны влияния земли
|
+
|
+
|
+
|
+
|
|
|
2.c.3
|
Проверка мощности при висении
|
|||||
|
2.c.3.a
|
В зоне влияния земли
|
+
|
+
|
+
|
+
|
|
|
2.c.3.b
|
Вне зоны влияния земли
|
+
|
+
|
+
|
+
|
|
|
2.c.4
|
Развороты в режиме висения
|
+
|
+
|
+
|
+
|
|
|
2.c.5
|
Эффект парирования крутящего момента (путевого управления)
|
+
|
+
|
+
|
+
|
|
|
2.c.6
|
Тенденция к поступательному горизонтальному перемещению
|
+
|
+
|
+
|
+
|
|
|
2.c.7
|
Висение при боковом, попутном, встречном ветре или при отсутствии ветра
|
+
|
+
|
+
|
+
|
|
|
2.c.8
|
Критический азимут
|
+
|
+
|
+
|
||
|
2.c.9
|
Руление по воздуху (горизонтальный поступательный полет (вперед, вбок, назад))
|
+
|
+
|
+
|
+
|
|
|
3
|
Взлет
|
|||||
|
3.a
|
В штатных условиях
|
|||||
|
3.a.1
|
С земли
|
+
|
+
|
+
|
+
|
|
|
3.a.2
|
Из режима висения
|
+
|
+
|
+
|
+
|
|
|
3.b
|
С разбегом
|
+
|
+
|
+
|
||
|
3.c
|
При боковом и попутном ветре
|
+
|
+
|
+
|
+
|
|
|
3.d
|
С максимальной мощностью
|
+
|
+
|
+
|
+
|
|
|
3.e
|
С максимальной сертифицированной взлетной массой
|
+
|
+
|
+
|
+
|
|
|
3.f
|
По приборам
|
+
|
+
|
+
|
+
|
+
|
|
3.g
|
С площадки ограниченных размеров
|
+
|
+
|
+
|
+
|
|
|
3.h
|
С площадки с уклоном
|
+
|
+
|
+
|
||
|
3.i
|
С учетом запаса высоты пролета над препятствиями
|
+
|
+
|
+
|
+
|
|
|
3.j
|
С высокорасположенных вертодромов, площадок, палубы, платформы
|
+
|
+
|
+
|
+
|
|
|
3.k
|
Вертикальный
|
+
|
+
|
+
|
+
|
|
|
3.l
|
В горной местности
|
+
|
+
|
+
|
+
|
|
|
3.m
|
Взлет в особых условиях
|
+
|
+
|
+
|
+
|
|
|
3.n
|
Переход в прямолинейный горизонтальный полет
|
+
|
+
|
+
|
+
|
|
|
3.o
|
Особые и аварийные ситуации при выполнении взлета
|
|||||
|
3.o.1
|
Отказ двигателя
|
+
|
+
|
+
|
||
|
3.o.2
|
Прерванный взлет и вынужденная посадка
|
|||||
|
3.o.2.a
|
Над поверхностью земли
|
+
|
+
|
+
|
+
|
|
|
3.o.2.b
|
Над водой
|
+
|
+
|
+
|
+
|
|
|
4
|
Набор высоты
|
|||||
|
4.a
|
В штатных условиях
|
+
|
+
|
+
|
+
|
+
|
|
4.b
|
Высота над препятствием
|
+
|
+
|
+
|
+
|
|
|
4.c
|
Наилучшая скороподъемность
|
+
|
+
|
+
|
+
|
+
|
|
4.d
|
Наилучший угол набора высоты
|
+
|
+
|
+
|
+
|
+
|
|
4.e
|
Вертикальный набор высоты.
|
+
|
+
|
+
|
+
|
|
|
4.f
|
С одним или несколькими неработающими двигателями.
|
+
|
+
|
+
|
+
|
|
|
4.g
|
Переход в горизонтальный полет
|
+
|
+
|
+
|
+
|
+
|
|
4.h
|
Полеты при отказе двигателя вплоть до высоты 300 м над возвышением вертодрома
|
+
|
+
|
+
|
+
|
|
|
5
|
Крейсерский полет
|
|||||
|
5.a
|
Летно-технические характеристики и летные качества
|
|||||
|
5.a.1
|
Прямолинейный и горизонтальный полет
|
+
|
+
|
+
|
+
|
+
|
|
5.a.2
|
Полет на малой скорости (не ниже скорости ETL)
|
+
|
+
|
+
|
+
|
+
|
|
5.a.3
|
Разгоны и торможения
|
+
|
+
|
+
|
+
|
+
|
|
5.a.4
|
Вибрации на больших скоростях
|
+
|
+
|
+
|
||
|
5.a.5
|
Предупреждение о превышении допустимой скорости
|
+
|
+
|
+
|
||
|
5.a.6
|
Развороты и виражи
|
|||||
|
5.a.6.a
|
В штатных условиях
|
+
|
+
|
+
|
+
|
+
|
|
5.a.6.b
|
Стандартные значения скоростей (значения 1/2, 1 и 2)
|
+
|
+
|
+
|
+
|
+
|
|
5.a.6.c
|
Глубокие виражи (развороты (угол крена 30° и 45°))
|
+
|
+
|
+
|
+
|
+
|
|
5.a.6.d
|
Эффект обратимости сервоприводов органов управления полетом
|
+
|
+
|
+
|
||
|
5.b
|
Маршрутная навигация
|
|||||
|
5.b.1
|
Точность отображения карты местности для выбора места вынужденной посадки
|
+
|
+
|
+
|
+
|
|
|
5.b.2
|
Точность отображения карты местности для визуальной навигации
|
+
|
+
|
+
|
+
|
|
|
5.b.3
|
Радионавигация
|
+
|
+
|
+
|
+
|
+
|
|
6
|
Снижение
|
|||||
|
6.a
|
Снижение в штатных условиях
|
+
|
+
|
+
|
+
|
+
|
|
6.b
|
Снижение с максимальной вертикальной скоростью (не аварийное снижение) в условиях ПВП и ППП
|
+
|
+
|
+
|
+
|
+
|
|
6.c
|
Снижение на режиме самовращения НВ
|
|||||
|
6.c.1
|
Прямолинейное
|
+
|
+
|
+
|
||
|
6.c.2
|
С разворотом
|
+
|
+
|
+
|
||
|
6.c.3
|
Метеорологические условия для ППП
|
+
|
+
|
+
|
||
|
6.c.4
|
До посадки
|
+
|
||||
|
6.c.5
|
Восстановление мощности
|
+
|
+
|
+
|
||
|
6.d
|
Пилотирование по приборам
|
+
|
+
|
+
|
+
|
+
|
|
7
|
Заход на посадку и посадка по приборам
|
|||||
|
Из приведенного списка должны быть выбраны только те испытания захода на посадку и посадки по приборам, которые относятся к имитируемому типу вертолета или его системам, причем испытания должны выполняться с ограничениями по скорости ветра и при соответствующих отказах системы
|
||||||
|
7.a
|
Точный заход на посадку до высоты принятия решения
|
|||||
|
7.a.1
|
Со всеми работающими двигателями
|
+
|
+
|
+
|
+
|
+
|
|
7.a.2
|
С одним неработающим (или несколькими неработающими) двигателем(ями)
|
+
|
+
|
+
|
+
|
+
|
|
7.a.3
|
Заход на посадку при совмещенном управлении с автопилотом
|
+
|
+
|
+
|
+
|
+
|
|
7.a.4
|
Заход в ручном режиме по указаниям командного пилотажно-навигационного прибора
|
+
|
+
|
+
|
+
|
+
|
|
7.a.5
|
Заход в ручном режиме без указаний командного пилотажно-навигационного прибора (необработанные данные)
|
+
|
+
|
+
|
+
|
+
|
|
7.a.6
|
С системами ИЛС и EFVS
|
+
|
+
|
+
|
+
|
|
|
7.a.7
|
Процедуры захода на посадку
|
|||||
|
7.a.7.a
|
ILS
|
|||||
|
7.a.7.a.1
|
Опубликованные заходы на посадку по категории I
|
+
|
+
|
+
|
+
|
+
|
|
7.a.7.a.2
|
Опубликованные заходы на посадку по категории II
|
+
|
+
|
+
|
||
|
7.a.7.b
|
С системами DGPS и GLS
|
+
|
+
|
+
|
+
|
+
|
|
7.b
|
Неточный заход на посадку до высоты принятия решения
|
|||||
|
7.b.1
|
Со всеми работающими двигателями
|
+
|
+
|
+
|
+
|
+
|
|
7.b.2
|
С одним неработающим (или с несколькими неработающими) двигателем(ями)
|
+
|
+
|
+
|
+
|
+
|
|
7.b.3
|
Заход на посадку при совмещенном управлении с автопилотом (3, 4 оси)
|
+
|
+
|
+
|
+
|
+
|
|
7.b.4
|
Заход в ручном режиме по указаниям командного пилотажно-навигационного прибора (далее - FD)
|
+
|
+
|
+
|
+
|
+
|
|
7.b.5
|
Заход в ручном режиме без указаний FD (необработанные данные)
|
+
|
+
|
+
|
+
|
+
|
|
7.b.6
|
С системами ИЛС и EFVS
|
+
|
+
|
+
|
+
|
|
|
7.b.7
|
Процедуры захода на посадку
|
|||||
|
7.b.7.a
|
Радиолокационное оборудование, которое используется для обеспечения полетов в прибрежных районах
|
+
|
+
|
+
|
+
|
|
|
7.b.7.b
|
Ненаправленный радиомаяк
|
+
|
+
|
+
|
+
|
+
|
|
7.b.7.c
|
VOR, VOR/DME, TACAN
|
+
|
+
|
+
|
+
|
+
|
|
7.b.7.d
|
RNAV/RNP/GNSS/RNP APCH, RNP AR APCH, PINS
|
+
|
+
|
+
|
+
|
+
|
|
7.b.7.e
|
ILS/LLZ (LOC), LLZ с обратным курсом (или LOC-BC)
|
+
|
+
|
+
|
+
|
+
|
|
7.b.7.f
|
Смещенный курсовой радиомаяк системы ILS/SDF (упрощенный курсовой маяк)
|
+
|
+
|
+
|
+
|
+
|
|
7.b.7.g
|
Полет по кругу (заход до маневра визуального полета по кругу)
|
+
|
+
|
+
|
+
|
+
|
|
7.c
|
Уход на второй круг (включая точку ухода на второй круг)
|
|||||
|
7.c.1
|
Со всеми работающими двигателями, вручную и при совмещенном управлении с автопилотом
|
+
|
+
|
+
|
+
|
+
|
|
7.c.2
|
С одним неработающим (или с несколькими неработающими) двигателем(ями) вручную и при совмещенном управлении с автопилотом
|
+
|
+
|
+
|
+
|
+
|
|
7.c.3
|
При отказе автопилота или системы повышения устойчивости в полете
|
+
|
+
|
+
|
||
|
8
|
Визуальный заход на посадку
|
|||||
|
8.a
|
В штатных условиях
|
+
|
+
|
+
|
+
|
|
|
8.b
|
Крутой
|
+
|
+
|
+
|
+
|
|
|
8.c
|
Пологий
|
+
|
+
|
+
|
+
|
|
|
8.d
|
Вертикальный
|
+
|
+
|
+
|
+
|
|
|
8.e
|
На посадочные площадки с возвышением (высокорасположенные площадки и площадки в горной местности) и площадки с уклоном
|
+
|
+
|
+
|
+
|
|
|
8.f
|
На палубу корабля, платформу буровой установки
|
+
|
+
|
+
|
+
|
|
|
8.g
|
На площадку ограниченных размеров
|
+
|
+
|
+
|
+
|
|
|
8.h
|
При боковом и попутном ветре
|
+
|
+
|
+
|
+
|
|
|
8.i
|
По визуальной схеме полета
|
+
|
+
|
+
|
+
|
|
|
8.j
|
Визуальный полет по кругу для выполнения посадки после захода на посадку по приборам
|
+
|
+
|
+
|
+
|
|
|
8.k
|
Быстрое торможение (интенсивное гашение скорости)
|
+
|
+
|
+
|
+
|
|
|
8.l
|
Заход на вынужденную посадку
|
+
|
+
|
+
|
+
|
|
|
8.m
|
Зависание (переход на режим висения)
|
+
|
+
|
+
|
+
|
|
|
8.n
|
С системами ИЛС и EFVS
|
+
|
+
|
+
|
+
|
|
|
8.p
|
Уход на второй круг
|
|||||
|
8.p.1
|
Со всеми работающими двигателями
|
+
|
+
|
+
|
+
|
|
|
8.p.2
|
С одним неработающим двигателем
|
+
|
+
|
+
|
+
|
|
|
8.p.3
|
Прерванная посадка на платформу буровой установки и палубу корабля
|
+
|
+
|
+
|
+
|
|
|
8.q
|
Полеты от 300 м над возвышением вертодрома до или после точки принятия решения при посадке
|
+
|
+
|
+
|
+
|
|
|
9
|
Переход к этапу посадки и приземления
|
|||||
|
9.a
|
Из режима висения
|
+
|
+
|
+
|
+
|
|
|
9.b
|
С пробегом
|
+
|
+
|
+
|
||
|
9.c
|
На площадку с уклоном
|
+
|
+
|
+
|
||
|
9.d
|
Тип поверхности (твердая, мягкая, вода)
|
+
|
+
|
+
|
||
|
9.e
|
С боковым и попутным ветром
|
+
|
+
|
+
|
+
|
|
|
9.f
|
С большой высоты
|
+
|
+
|
+
|
+
|
|
|
9.g
|
В особых условиях (снег, песок, пыль, водяные брызги)
|
+
|
+
|
+
|
||
|
9.h
|
На посадочные площадки с возвышением (высокорасположенные площадки) и площадки в горной местности
|
+
|
+
|
+
|
+
|
|
|
9.i
|
На палубу корабля и платформу буровой установки
|
+
|
+
|
+
|
||
|
9.j
|
Из режима визуального захода на посадку
|
+
|
+
|
+
|
+
|
|
|
9.k
|
Из режима захода на посадку по приборам до допустимой минимальной высоты, затем выполнение посадки по правилам визуального захода на посадку
|
+
|
+
|
+
|
+
|
+
|
|
9.l
|
На режиме самовращения НВ (авторотации)
|
+
|
+
|
+
|
||
|
9.m
|
При отказе систем контроля противовращения (путевой управляемости)
|
+
|
+
|
+
|
||
|
10
|
Останов двигателя и размещение на стоянке
|
|||||
|
10.a
|
Работа двигателя и систем
|
+
|
+
|
+
|
+
|
+
|
|
10.b
|
Работа стояночного тормоза
|
+
|
+
|
+
|
+
|
+
|
|
10.c
|
Отключение и замедление НВ
|
+
|
+
|
+
|
+
|
+
|
|
10.d
|
Работа тормоза НВ
|
+
|
+
|
+
|
+
|
+
|
|
10.e
|
Аварийная эвакуация
|
+
|
+
|
+
|
+
|
+
|
|
11
|
Любой этап полета
|
|||||
|
11.a
|
Работа систем вертолета и силовой установки (при наличии таковых), включая нештатные и аварийные процедуры
|
|||||
|
11.a.1
|
Система наддува и кондиционирования воздуха
|
+
|
+
|
+
|
||
|
11.a.2
|
Автопилот и командно-пилотажный прибор
|
+
|
+
|
+
|
+
|
+
|
|
11.a.3
|
Система повышения устойчивости и управляемости
|
+
|
+
|
+
|
+
|
+
|
|
11.a.4
|
Система связи
|
+
|
+
|
+
|
+
|
+
|
|
11.a.5
|
Система электроснабжения
|
+
|
+
|
+
|
+
|
+
|
|
11.a.6
|
Система обнаружения дыма и огня и система пожаротушения
|
+
|
+
|
+
|
+
|
+
|
|
11.a.7
|
Рычаги управления полетом
|
+
|
+
|
+
|
+
|
+
|
|
11.a.8
|
Компьютеры системы управления полетом
|
+
|
+
|
+
|
+
|
+
|
|
11.a.9
|
Система стабилизации
|
+
|
+
|
+
|
+
|
+
|
|
11.a.10
|
Топливная и масляная системы
|
+
|
+
|
+
|
+
|
+
|
|
11.a.11
|
Гидравлическая система
|
+
|
+
|
+
|
+
|
+
|
|
11.a.12
|
Противообледенительная система (система удаления льда)
|
+
|
+
|
+
|
+
|
+
|
|
11.a.13
|
Шасси, включая время их выпуска, и задействование поплавков
|
+
|
+
|
+
|
+
|
+
|
|
11.a.14
|
Освещение (наружное и внутреннее)
|
+
|
+
|
+
|
+
|
+
|
|
11.a.15
|
Кислородная система
|
+
|
+
|
+
|
||
|
11.a.16
|
Пневматическая система
|
+
|
+
|
+
|
+
|
+
|
|
11.a.17
|
ВСУ
|
+
|
+
|
+
|
+
|
+
|
|
11.a.18
|
Двигатель
|
+
|
+
|
+
|
+
|
+
|
|
11.a.19
|
Трансмиссия
|
+
|
+
|
+
|
+
|
+
|
|
11.a.20
|
Системы винтов
|
+
|
+
|
+
|
+
|
+
|
|
11.a.21
|
Бортовая РЛС, используемая для предупреждения о неблагоприятных метеоусловиях, для представления рекомендаций по предотвращению угрозы столкновения, а также при выполнении полетов и заходов на посадку в прибрежных районах
|
+
|
+
|
+
|
||
|
11.a.22
|
Системы предупреждения об опасности сближения с землей и системы предупреждения столкновений
|
+
|
+
|
+
|
||
|
11.a.23
|
Системы индикации полетной информации
|
+
|
+
|
+
|
+
|
+
|
|
11.a.24
|
Системы пилотажных приборов
|
+
|
+
|
+
|
+
|
+
|
|
11.a.25
|
Системы управления полетом
|
+
|
+
|
+
|
+
|
+
|
|
11.a.26
|
Индикаторы на лобовом стекле (включая EFVS, если она используется)
|
+
|
+
|
+
|
+
|
|
|
11.a.27
|
Навигационные системы
|
+
|
+
|
+
|
+
|
+
|
|
11.a.28
|
Оборудование предупреждения о сдвиге ветра
|
+
|
+
|
+
|
||
|
11.a.29
|
Электронный полетный планшет
|
+
|
+
|
+
|
+
|
|
|
11.a.30
|
Автоматические карты контрольных проверок (порядок действий в штатных, нештатных и аварийных ситуациях)
|
+
|
+
|
+
|
+
|
+
|
|
11.a.31
|
Системы с речевым управлением
|
+
|
+
|
+
|
+
|
+
|
|
11.b
|
Порядок действий в воздухе и другие процедуры
|
|||||
|
11.b.1
|
Полет в зоне ожидания
|
+
|
+
|
+
|
+
|
+
|
|
11.b.2
|
Предотвращение опасных столкновений в воздухе (воздушное движение, метеоусловия, включая визуальную корреляцию)
|
+
|
+
|
+
|
||
|
11.b.3
|
Удары винта по упорам на валу
|
+
|
+
|
+
|
+
|
|
|
11.b.4
|
Неумышленный вход в зону СМУ
|
+
|
+
|
+
|
+
|
|
|
11.b.5
|
Восстановление после попадания в необычное пространственное положение
|
+
|
+
|
+
|
+
|
+
|
|
11.b.6
|
Попадание в сдвиг ветра или грозовой микропорыв
|
+
|
||||
|
11.b.7
|
Бортовой метеорологический радиолокатор
|
+
|
+
|
+
|
||
|
11.b.8
|
Отказ двигателя - повторный запуск
|
+
|
+
|
+
|
||
|
11.b.9
|
Полеты на большой высоте
|
+
|
+
|
+
|
||
|
11.b.10
|
Отказы тормозов и пневматиков
|
+
|
+
|
+
|
||
|
11.c
|
Неисправности
|
|||||
|
11.c.1
|
Неисправность системы повышения устойчивости в полете
|
+
|
+
|
+
|
+
|
+
|
|
11.c.2
|
Неисправность автопилота в полете
|
+
|
+
|
+
|
+
|
+
|
|
11.c.3
|
Пожар в двигателе на земле или на режиме висения
|
+
|
+
|
+
|
||
|
11.c.4
|
Пожар в двигателе во время прямолинейного горизонтального полета
|
+
|
+
|
+
|
+
|
+
|
|
11.c.5
|
Неисправности двигателя
|
+
|
+
|
+
|
+
|
+
|
|
11.c.6
|
Пожар и задымление на земле или на режиме висения
|
+
|
+
|
+
|
||
|
11.c.7
|
Пожар и задымление во время прямолинейного горизонтального полета
|
+
|
+
|
+
|
+
|
+
|
|
11.c.8
|
Отказ двигателя до критической точки принятия решения (прерванный взлет)
|
+
|
+
|
+
|
+
|
|
|
11.c.9
|
Отказ двигателя после критической точки принятия решения (для многодвигательных вертолетов)
|
+
|
+
|
+
|
+
|
|
|
11.c.10
|
Заход на посадку по приборам и уход на второй круг с одним неработающим двигателем
|
+
|
+
|
+
|
+
|
+
|
|
11.c.11
|
Заход на посадку по приборам и посадка с одним неработающим двигателем
|
+
|
+
|
+
|
||
|
11.c.12
|
Посадка на режиме авторотации с неработающим двигателем
|
+
|
+
|
|||
|
11.c.13
|
Зарождающееся вихревое кольцо и попадание в вихревое кольцо на высоте
|
+
|
+
|
+
|
||
|
11.c.14
|
Зарождающееся вихревое кольцо и попадание в вихревое кольцо при заходе на посадку
|
+
|
+
|
+
|
||
|
11.c.15
|
Восстановление из необычного пространственного положения
|
+
|
+
|
+
|
+
|
+
|
|
11.c.16
|
Сигнализация о стружке в масле в главном редукторе, промежуточном редукторе, редукторе хвостового винта/предупреждение о низком давлении масла на режиме висения
|
+
|
+
|
+
|
+
|
|
|
11.c.17
|
Сигнализация о стружке в масле в главном редукторе, промежуточном редукторе, редукторе хвостового винта и предупреждение о низком давлении масла во время прямолинейного горизонтального полета
|
+
|
+
|
+
|
+
|
+
|
|
11.c.18
|
Отказ гидросистемы на режиме висения
|
+
|
+
|
+
|
||
|
11.c.19
|
Отказ гидросистемы во время прямолинейного горизонтального полета
|
+
|
+
|
+
|
+
|
+
|
|
11.c.20
|
Заклинивание сервопривода
|
+
|
+
|
+
|
+
|
+
|
|
11.c.21
|
Отказ приборного оборудования, системы индикации в полете по ПВП
|
+
|
+
|
+
|
+
|
+
|
|
11.c.22
|
Отказ приборного оборудования, системы индикации в полете по ППП
|
+
|
+
|
+
|
+
|
+
|
|
11.c.23
|
Отказ системы постоянного тока
|
+
|
+
|
+
|
+
|
+
|
|
11.c.24
|
Отказ системы переменного тока
|
+
|
+
|
+
|
+
|
+
|
|
11.c.25
|
Отказ аккумулятора
|
+
|
+
|
+
|
+
|
+
|
|
11.c.26
|
Полный отказ системы электроснабжения
|
+
|
+
|
+
|
+
|
+
|
|
11.c.27
|
Отказа системы перекачки топлива
|
+
|
+
|
+
|
||
|
11.c.28
|
Отказ системы подачи топлива
|
+
|
+
|
+
|
||
|
11.c.29
|
Неисправность шасси
|
+
|
+
|
+
|
||
|
11.c.30
|
Потеря эффективности рулевого винта
|
+
|
+
|
+
|
||
|
11.c.31
|
Отказ привода рулевого винта на режиме висения
|
+
|
+
|
+
|
||
|
11.c.32
|
Отказ привода рулевого винта во время прямолинейного горизонтального полета
|
+
|
+
|
|||
|
11.c.33
|
Отказ управления рулевым винтом на режиме висения
|
+
|
+
|
+
|
||
|
11.c.34
|
Отказ управления рулевым винтом во время прямолинейного горизонтального полета
|
+
|
+
|
|||
|
11.c.35
|
Неисправность в системе двойного управления
|
+
|
+
|
+
|
||
|
11.c.36
|
Неисправность в системе раздельного управления
|
+
|
+
|
+
|
||
|
11.c.37
|
Динамическое опрокидывание
|
+
|
+
|
+
|
||
|
11.c.38
|
Сильная вибрация
|
+
|
+
|
+
|
||
|
11.c.39
|
Земной резонанс
|
+
|
+
|
|||
|
11.c.40
|
Срыв потока с отступающей лопасти НВ
|
+
|
+
|
|||
|
11.c.41
|
Обледенение винта и планера
|
+
|
+
|
|||
|
11.c.42
|
Обледенение двигателя
|
+
|
+
|
+
|
+
|
+
|
|
11.c.43
|
Неисправности противообледенительной системы
|
+
|
+
|
+
|
+
|
+
|
|
11.c.44
|
Вынужденная посадка на воду
|
+
|
+
|
+
|
||
|
11.c.45
|
Отказы автономной цифровой системы управления двигателем
|
+
|
+
|
|||
|
12
|
Система визуализации
|
|||||
|
12.a
|
Требования к содержанию функциональных испытаний
|
|||||
|
12.a.1
|
Аэропорты и посадочные площадки для вертолетов
|
|||||
|
Имитация реальных аэропортов и посадочных площадок для вертолетов должна соответствовать опубликованным данным, которые используются для обеспечения полетов вертолетов. Должна обеспечиваться возможность выбора имитируемых аэропортов и посадочных площадок для вертолетов с РМИ
|
||||||
|
12.a.1.a
|
Как минимум, четыре имитируемых аэропортов или посадочных площадок для вертолетов
|
|||||
|
12.a.1.a.1
|
Как минимум, один имитируемый конкретный аэропорт
|
+
|
+
|
+
|
||
|
12.a.1.a.2
|
Как минимум, одна имитируемая посадочная площадка для вертолетов, расположенная значительно выше окружающих строений или ландшафта местности
|
+
|
+
|
+
|
||
|
12.a.1.a.3
|
Как минимум, одна имитируемая посадочной площадки для вертолета ограниченных размеров
|
+
|
+
|
+
|
||
|
12.a.1.a.4
|
Как минимум, одна имитируемая посадочной площадки для вертолетов, расположенная на поверхности с уклоном, по крайней мере, 2,5°
|
+
|
+
|
+
|
||
|
12.a.1.b
|
Как минимум, один имитируемый типовой аэропорт и одна типовая посадочная площадка для вертолетов
|
+
|
||||
|
12.a.1.c
|
Минимум один имитируемый базовый аэропорт или вертодром
|
+
|
||||
|
12.a.2
|
Адекватность воспроизведения визуальной картины
|
|||||
|
12.a.2.a
|
На визуальной картине должны точно воспроизводиться те части аэропорта и прилегающей к нему местности, которые используются в учебной программе. Точность отображения визуальных ориентиров должна позволять оценить скорость изменения высоты, высоту над уровнем земли, поступательные перемещения и их скорость во время взлета, при выполнении захода на посадку, при маневрировании на малой высоте или с низкой воздушной скоростью, при выполнении захода на посадку, в режиме висения и при приземлении
|
+
|
+
|
+
|
||
|
12.a.2.b
|
Адекватность воспроизведения визуальной картины и визуальных ориентиров должна быть достаточной для того, чтобы экипаж мог:
визуально распознать аэропорт и посадочную площадку для вертолетов;
определить положение моделируемого вертолета;
успешно выполнять взлеты, заходы на посадку и посадки;
по мере необходимости, выполнять маневры в районе аэропорта, посадочной площадки в режиме висения или во время руления по воздуху. Кроме того, точность визуальных ориентиров должна позволять оценить скорость изменения высоты, поступательные перемещения и их величины во время взлета и посадки
|
+
|
||||
|
12.a.2.c
|
Визуальные картины с достаточным содержанием должны обеспечивать летному экипажу возможность успешно выполнять взлеты, заходы на посадку и посадки
|
+
|
||||
|
12.a.2.d
|
Для выполнения маршрутных полетов, на картине должен присутствовать детализованный профиль местности, обеспечивающий возможность визуальной навигации с использованием карты соответствующего масштаба и на типичных высотах в радиусе 30 минут полета со средней крейсерской скоростью
|
+
|
+
|
+
|
+
|
|
|
12.a.3
|
Посадочные площадки для вертолетов, ВПП и рулежные дорожки
|
|||||
|
12.a.3.a
|
Посадочные площадки для вертолетов, ВПП и рулежные дорожки аэропорта
|
+
|
+
|
+
|
||
|
12.a.3.b
|
Типовые посадочные площадки для вертолетов, ВПП и рулежные дорожки
|
+
|
||||
|
12.a.3.c
|
Базовые посадочные площадки для вертолетов, ВПП и рулежные дорожки
|
+
|
||||
|
12.a.4
|
Если в картине аэропорта одновременно воспроизводятся две параллельных и одна пересекающаяся ВПП, то должно обеспечиваться одновременное освещение, минимум, двух ВПП
|
+
|
+
|
+
|
||
|
12.a.5
|
Превышения и положения торцов ВПП и посадочных площадок для вертолетов должны моделироваться таким образом, чтобы обеспечить корреляцию с системами моделируемого вертолета (ИЛС, GPS, компас, высотомер)
|
+
|
+
|
+
|
+
|
+
|
|
12.a.6
|
Воспроизведение уклонов посадочных площадок, ВПП, рулежных дорожек, и парковочных площадок не должно создавать отвлекающие или нереалистичные эффекты
|
+
|
+
|
+
|
+
|
|
|
12.a.7
|
Покрытие, разметка и освещение посадочных площадок для вертолетов
|
|||||
|
12.a.7.a
|
Покрытие и маркировка каждой посадочной площадки включают следующее:
|
|||||
|
12.a.7.a.1
|
Стандартную идентификационную маркировку вертодрома (символ "Н" и обозначение местоположения) и другие специфические виды маркировки (обозначения вертолетной площадки больницы, прицельной точки посадки, прицельного круга посадки соответствующего размера окраски и ориентации)
|
+
|
+
|
+
|
+
|
|
|
12.a.7.a.2
|
Маркировку зоны приземления и отрыва
|
+
|
+
|
+
|
+
|
|
|
12.a.7.a.3
|
Соответствующую разметку зоны конечного этапа захода на посадку и взлета, учитывающую расчетные габариты вертолета, размер опасной зоны, ограничения по весу
|
+
|
+
|
+
|
+
|
|
|
12.a.7.a.4
|
По мере необходимости, маркировку зоны безопасности, OFS и LOS
|
+
|
+
|
+
|
+
|
|
|
12.3.7.3.5
|
Знаки, соответствующие используемой модели
|
+
|
+
|
+
|
+
|
|
|
12.a.7.a.6
|
Ветровой конус, позволяющий определить соответствующие силу и направление ветра
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.b
|
Освещение посадочной площадки для вертолетов соответствующих цветов включает следующее:
|
|||||
|
12.a.7.b.1
|
Указатель направления посадки
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.b.2
|
Возвышающиеся и утопленные огни по периметру зоны конечного этапа захода на посадку и взлета, зоны приземления и отрыва и прожекторное освещение
|
+
|
+
|
+
|
+
|
|
|
12.a.7.b.3
|
Освещение ветрового конуса
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.b.4
|
Вспомогательные средства визуального захода на посадку
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.b.5
|
Огни захода на посадку соответствующего цвета
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.c
|
Рулежные дорожки, зона движения и маркировка, характерная для посадочных площадок для вертолетов, включая:
|
|||||
|
12.a.7.c.1
|
Рулежные дорожки (маршруты руления);
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.c.2
|
Перроны;
|
+
|
+
|
+
|
+
|
|
|
12.a.7.d
|
Освещение рулежных дорожек соответствующего цвета, направленность, характеристики и расположение светосигнального оборудования рулежных дорожек, связанных с каждой посадочной площадкой, включая:
|
|||||
|
12.a.7.d.1
|
Рулежные дорожки (маршруты руления);
|
+
|
+
|
+
|
+
|
+
|
|
12.a.7.d.2
|
Парковочные площадки;
|
+
|
+
|
+
|
+
|
|
|
12.a.8
|
Покрытие, маркировка и освещение аэропорта:
|
|||||
|
12.a.8.a
|
Покрытие и маркировка ВПП, характерные для каждой используемой ВПП, а также знаки и указатели включая:
|
|||||
|
12.a.8.a.1
|
Маркировку торца ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.a.2
|
Номера ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.a.3
|
Маркировку зоны приземления на ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.a.4
|
Маркировку фиксированного расстояния на ВПП;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.a.5
|
Маркировку границ ВПП;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.a.6
|
Маркировку осевой линии ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.a.7
|
Указатели дистанции до торца ВПП;
|
+
|
+
|
+
|
||
|
12.a.8.a.8
|
Знаки на пересечении ВПП и рулежных дорожек;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.a.9
|
Ветровой конус, позволяющий определить соответствующую силу и направление ветра;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b
|
Огни соответствующих цветов, характерные для используемой ВПП, включая:
|
|||||
|
12.a.8.b.1
|
Огни торца ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b.2
|
Посадочные огни ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b.3
|
Концевые огни ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b.4
|
Огни осевой линии ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b.5
|
Огни зоны приземления;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b.6
|
Огни выводных рулежных дорожек (огни выруливания);
|
+
|
+
|
+
|
+
|
|
|
12.a.8.b.7
|
Соответствующие средства визуальной посадки на ВПП;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.b.8
|
Соответствующую систему огней подхода к ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.b.9
|
Освещение ветрового конуса;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.c
|
Покрытие и маркировка рулежных дорожек, связанных с каждой конкретной используемой ВПП, включая:
|
|||||
|
12.a.8.c.1
|
Маркировку границ ВПП;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.c.2
|
Маркировку осевой линии ВПП;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.c.3
|
Маркировку предварительного старта на ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.c.4
|
Маркировку критической зоны приземления по приборам;
|
+
|
+
|
+
|
+
|
|
|
12.a.8.c.5
|
Для разрешенных полетов в условиях ограниченной видимости должно демонстрироваться следующее: все маркировки рулежных дорожек, освещение и указатели руления, как минимум, от места назначенной стоянки до назначенной ВПП и обратно после посадки на назначенную ВПП до назначенного места стоянки; а также маршрут руления в условиях ограниченной видимости. Назначенная ВПП и маршрут руления должны соответствовать аэропорту, в котором разрешены полеты в условиях ограниченной видимости
|
+
|
+
|
+
|
+
|
|
|
12.a.8.d
|
Соответствующие цвета, направленность, характеристики и расположение светосигнального оборудования рулежных дорожек, связанных с каждой конкретной используемой ВПП, включая:
|
|||||
|
12.a.8.d.1
|
Посадочные огни ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.d.2
|
Огни осевой линии ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.a.8.d.3
|
Огни места предварительного старта на ВПП и критической зоны приземления по приборам
|
+
|
+
|
+
|
+
|
+
|
|
12.a.9
|
Необходимая корреляция визуальной модели с другими имитируемыми компонентами окружающей обстановки аэропорта и посадочной площадки
|
|||||
|
12.a.9.a
|
Модели аэропорта или посадочной площадки для вертолетов следует должным образом согласовывать с соответствующими навигационными средствами, обеспечивающими движение вертолетов на используемой ВПП или посадочной площадке для вертолетов
|
+
|
+
|
+
|
+
|
+
|
|
12.a.9.b
|
Моделирование загрязнения ВПП или посадочной площадки для вертолетов должно коррелироваться с воспроизводимой поверхностью и освещением ВПП
|
+
|
+
|
+
|
+
|
|
|
12.a.10
|
Здания, сооружения и светосигнальное оборудование аэропорта и посадочной площадки для вертолетов
|
|||||
|
12.a.10.a
|
Здания, сооружения и освещение:
|
|||||
|
12.a.10.a.1
|
Здания, сооружения, объекты и светосигнальное оборудование аэропорта или посадочной площадки для вертолетов
|
+
|
+
|
+
|
||
|
12.a.10.a.2
|
Здания, сооружения, объекты и светосигнальное оборудование типового аэропорта или посадочной площадки для вертолетов
|
+
|
||||
|
12.a.10.a.3
|
Здания, сооружения, объекты и светосигнальное оборудование базового аэропорта или посадочной площадки для вертолетов
|
+
|
||||
|
12.a.10.b
|
Типовые движущиеся и неподвижные препятствия (воздушные суда, аэродромная техника и сооружения на аэродроме)
|
+
|
+
|
+
|
+
|
|
|
12.a.10.c
|
Маркировка стояночных мест (маркировка опасных мест, линий заруливания на стоянки), освещение и аэродромный сигнальщик
|
+
|
+
|
+
|
||
|
12.a.11
|
Местность и препятствия
|
|||||
|
12.a.11.a
|
Местность и препятствия в радиусе 46 км от исходного аэропорта или посадочной площадки для вертолетов с соответствующей цветовой маркировкой и текстурой моделируемого района. Это включает достаточное количество наземных объектов соответствующего размера и в соответствующей перспективе
|
+
|
+
|
+
|
||
|
12.a.11.b
|
Типовое отображение местности и препятствий в радиусе 18,5 км от исходного аэропорта или посадочной площадки для вертолетов с соответствующей цветовой маркировкой и текстурой
|
+
|
||||
|
12.a.11.c
|
Отображение топографических особенностей местности в радиусе 9,25 км от исходного аэропорта или посадочной площадки для вертолетов. Ограниченная плоская местность считается приемлемой
|
+
|
||||
|
12.a.11.d
|
Моделирование основных особенностей рельефа местности: визуальная картина ниже 1500 м с соответствующими особенностями рельефа местности, позволяющая осуществлять навигацию, полагаясь только на визуальные наземные ориентиры, для чего используются соответствующие карты (карты в масштабе 1:500000, 1:250000, 1:100000). Контуры ландшафта должны соответствовать действительности
|
+
|
+
|
+
|
||
|
12.a.11.e
|
Моделирование зданий, деревьев и других вертикальных преград, расположенных в непосредственной близости от посадочной площадки
|
+
|
+
|
+
|
+
|
|
|
12.a.11.f
|
Моделирование проводов линий электропередач, расположенных в непосредственной близости от посадочной площадки
|
+
|
+
|
+
|
+
|
|
|
12.a.12
|
Заметные и узнаваемые естественные и искусственные объекты и движущиеся ВС
|
|||||
|
12.a.12.a
|
Заметные и узнаваемые естественные и искусственные объекты в радиусе 46 км от исходного аэропорта или посадочной площадки для вертолетов
|
+
|
+
|
+
|
||
|
Это требование относится к естественным и искусственным объектам, используемыми пилотами для ориентации в полете. В отношении удаленных аэропортов, не предназначенных для посадки, должно предоставляться только достаточно понятное отображение направлений ВПП
|
||||||
|
12.a.12.b
|
Типовое отображение заметных и узнаваемых естественных и искусственных объектов в радиусе 18,5 км от исходного аэропорта или посадочной площадки для вертолетов
|
+
|
||||
|
Это требование относится к естественным и искусственным объектам, используемыми пилотами для ориентации в полете. В отношении удаленных аэропортов, не предназначенных для посадки, должно предоставляться только достаточно понятное отображение направлений ВПП
|
||||||
|
12.a.12.c
|
Типовое движение ВС (включая возможность воспроизведения опасных ситуаций в полете)
|
+
|
+
|
+
|
+
|
|
|
12.b
|
Управление визуальной картиной
|
|||||
|
12.b.1
|
Должна обеспечиваться регулировка интенсивности освещения в соответствии с 6 уровнями (от 0 до 5) для всех посадочных площадок и ВПП аэродрома, огней подхода, рулежных дорожек аэропорта и искусственных сооружений для любого вида захода на посадку; все точечные источники света на визуальной картине должны соответствующим образом постепенно угасать в зависимости от условий окружающей обстановки, установленной в данный момент времени на тренажера
|
+
|
+
|
+
|
+
|
|
|
12.b.2
|
Интенсивность освещения всех ВПП, огней подхода и рулежных дорожек аэропорта, огней подхода посадочных площадок для вертолетов и искусственных сооружений для любого вида захода на посадку должна соответствовать типовой интенсивности, используемой во время тренировок пилотов при заданном уровне видимости; все точечные источники света визуальной картины должны соответствующим образом постепенно угасать
|
+
|
||||
|
12.b.3
|
Должна реалистично воспроизводиться направленность проблесковых огней, огней подхода, посадочных огней ВПП, а также средств визуальной посадки и огней осевой линии ВПП, огней торца ВПП, огней зоны приземления на ВПП предполагаемой посадки, а также огней зоны приземления и отрыва или зоны конечного этапа захода на посадку и взлета
|
+
|
+
|
+
|
+
|
+
|
|
12.c
|
Опознавание визуальных объектов
|
|||||
|
12.c.1
|
Посадочные площадки для вертолетов:
|
|||||
|
12.c.1.a
|
Идентификация вертодрома, видимость проблесковых огней, огней захода на посадку на расстоянии 4,8 км
|
+
|
+
|
+
|
+
|
+
|
|
12.c.1.b
|
Огни средств визуального захода на посадку с углом наклона траектории (до 12°) при заходе на посадку
|
+
|
+
|
+
|
+
|
+
|
|
12.c.1.c
|
Идентификация рулежной дорожки с расстояния 3,2 км
|
+
|
+
|
+
|
+
|
+
|
|
12.c.1.d
|
Маркировка в пределах диапазона освещения посадочных огней в ночное время, в условиях сумерек и на рассвете
|
+
|
+
|
+
|
+
|
+
|
|
12.c.1.e
|
Маркировка в соответствии с требованиями испытания разрешающей способности для картин в дневное время
|
+
|
+
|
+
|
+
|
|
|
12.c.1.f
|
Огни направления захода на посадку и возвышающиеся огни зоны конечного этапа захода на посадку и взлета на расстоянии 1,6 км
|
+
|
+
|
+
|
+
|
|
|
12.c.1.g
|
Утопленные огни зоны конечного этапа захода на посадку и взлета, огни зоны приземления и отрыва, а также огни освещения ветрового конуса на расстоянии 800 м.
|
+
|
+
|
+
|
+
|
+
|
|
12.c.1.h
|
Видимость огней рулежной дорожки в зоне висения (желтые, синие, желтые цилиндры) из зоны приземления и отрыва
|
+
|
+
|
+
|
+
|
+
|
|
12.c.2
|
ВПП:
|
|||||
|
12.c.2.a
|
Идентификация ВПП, видимость проблесковых огней, огней подхода и белых посадочных огней ВПП на расстоянии 8 км от торца ВПП;
|
+
|
+
|
+
|
+
|
+
|
|
12.c.2.b
|
Огни средств визуального захода на посадку на расстоянии 8 км от торца ВПП;
|
+
|
+
|
+
|
||
|
12.c.2.c
|
Огни средств визуального захода на посадку на расстоянии 4,8 км от торца ВПП;
|
+
|
+
|
|||
|
12.c.2.d
|
Огни осевой линии ВПП и определение рулежной полосы на расстоянии 4,8 км;
|
+
|
+
|
+
|
+
|
+
|
|
12.c.2.e
|
Огни торца ВПП и огни зоны приземления на расстоянии 3,2 км;
|
+
|
+
|
+
|
+
|
+
|
|
12.c.2.f
|
Маркировка ВПП в пределах диапазона освещения посадочных огней в ночное время, в условиях сумерек и на рассвете;
|
+
|
+
|
+
|
+
|
+
|
|
12.c.2.g
|
Маркировка в соответствии с требованиями испытания разрешающей способности для картин в дневное время;
|
+
|
+
|
+
|
+
|
|
|
12.c.2.h
|
При выполнении заходов на посадку по кругу освещение ВПП предполагаемой посадки и соответствующее освещение должно постепенно угасать, не отвлекая пилота
|
+
|
+
|
+
|
+
|
|
|
12.d
|
Возможности воспроизведения выбранной визуальной картины аэропорта
|
|||||
|
12.d.1
|
Ночное время
|
+
|
+
|
+
|
+
|
+
|
|
12.d.2
|
Сумерки
|
+
|
+
|
+
|
+
|
+
|
|
12.d.3
|
Дневное время
|
+
|
+
|
+
|
+
|
+
|
|
12.d.4
|
Динамические эффекты - возможность воспроизведения многочисленных опасностей на земле и в воздухе. Опасные ситуации должны задаваться с РМИ
|
+
|
+
|
+
|
+
|
|
|
12.d.5
|
Ложное восприятие (иллюзии) - визуальные картины, отражающие характерные физические отношения, вызывающие иллюзии при посадке
|
+
|
+
|
+
|
||
|
12.e
|
Взаимосвязь с вертолетом и соответствующим оборудованием
|
|||||
|
12.e.1
|
Сочетание изображения системы визуализации с аэродинамической моделью
|
+
|
+
|
+
|
+
|
+
|
|
12.e.2
|
Соотношение визуальных эффектов и реакций реального вертолета
|
+
|
+
|
+
|
+
|
+
|
|
12.e.3
|
Визуальные эффекты для оценки вертикальной скорости снижения и восприятия глубины пространства при выполнении посадок
|
+
|
+
|
+
|
+
|
|
|
12.e.4
|
Точное изображение окружающей обстановки в зависимости от пространственного положения вертолета
|
+
|
+
|
+
|
+
|
+
|
|
12.e.5
|
Визуальная картина должна коррелироваться с комплексными системами вертолета (если они установлены)
|
|||||
|
12.e.5.a
|
Показания метеолокатора должны коррелироваться с визуальной картиной
|
+
|
+
|
+
|
+
|
+
|
|
12.e.5.b
|
Радиолокационное оборудование, которое используется для обеспечения полетов в прибрежных районах, должно работать в соответствии с моделируемой ситуацией и визуальной картиной
|
+
|
+
|
+
|
+
|
|
|
12.e.5.c
|
Сигналы систем предупреждения об опасности сближения с землей (HTAWS, EGPWS, GPWS) и столкновений с ВС (TCAS) должны коррелироваться с визуальной картиной
|
+
|
+
|
+
|
+
|
|
|
12.e.6
|
Должно обеспечиться воспроизведение эффектов работы стеклоочистителей (удаление дождевых капель после включения)
|
+
|
+
|
+
|
+
|
|
|
12.e.7
|
Должны имитироваться визуальные эффекты для каждого видимого собственного внешнего вертолетного светосигнального и осветительного оборудования (рулежное, посадочное и поисковое выступающее осветительное оборудование, в том числе независимого функционирования)
|
+
|
+
|
+
|
+
|
+
|
|
12.e.8
|
Динамическое визуальное изображение лопастей несущего винта и траектории движения их законцовок, включая моделирование начала движения и остановки, а также правильной ориентации диска НВ, при подаче пилотом управляющего сигнала
|
+
|
+
|
+
|
+
|
|
|
12.e.9
|
Визуальное изображение плоскости траектории законцовки лопасти и ее ориентации при подаче пилотом управляющего сигнала
|
+
|
||||
|
12.e.10
|
Система визуализации должна правильно представлять высоту и реакции от столкновения с трехмерными объектами в соответствии с геометрией вертолета
|
+
|
+
|
+
|
+
|
+
|
|
12.f
|
Качество изображения
|
|||||
|
12.f.1
|
Дискретность
|
|||||
|
12.f.1.a
|
Отображаемые поверхности и их текстура не должны иметь видимой дискретности (ступенчатости)
|
+
|
+
|
+
|
||
|
12.f.1.b
|
Отображаемые поверхности и их текстура не должны создавать отвлекающей внимание дискретности (ступенчатости)
|
+
|
+
|
|||
|
12.f.2
|
Система должна воспроизводить полноцветные реалистичные текстурные эффекты
|
+
|
+
|
+
|
+
|
|
|
12.f.3
|
Точечные источники света системы не должны отвлекать внимание
|
+
|
+
|
+
|
+
|
+
|
|
12.f.4
|
Система должна обеспечивать фокусный эффект для моделирования дождя
|
+
|
+
|
+
|
+
|
|
|
12.f.5
|
Система должна обеспечивать перспективное увеличение точечных источников света
|
+
|
+
|
+
|
+
|
|
|
12.f.6
|
Отображение эффекта заслонения частей одних объектов визуальной картины другими в каждом канале системы на тестовой визуальной картине
|
+
|
+
|
+
|
+
|
+
|
|
12.g
|
Эффекты внешней обстановки
|
|||||
|
12.g.1
|
Воспроизводимая картина должна соответствовать видам загрязнения поверхности ВПП и включать в себя соответствующее отражение освещения ВПП с учетом эффектов влажности, частично затемненных из-за снега огней или других соответствующих эффектов
|
+
|
+
|
+
|
+
|
|
|
12.g.2
|
Воспроизведение особых метеоусловий, включая акустические, акселерационные и визуальные эффекты незначительных, средних и интенсивных осадков и приближения грозы при выполнении взлета, при заходе на посадку и посадке, на высоте от 600 м и ниже над уровнем аэродрома и в радиусе 16 км
|
+
|
+
|
+
|
+
|
|
|
12.g.3
|
Визуальная картина одного заснеженного аэропорта или посадочной площадки, если это соответствует условиям зоны полетов эксплуатанта, включая покрытые снегом поверхности и местность
|
+
|
+
|
+
|
+
|
|
|
12.g.4
|
Должны воспроизводиться эффекты, возникающие при выполнении полетов в облаках: переменная плотность облаков, эффекты скорости и изменения окружающей обстановки
|
+
|
+
|
+
|
+
|
|
|
12.g.5
|
Эффект многослойной облачности, включая отдельные, рассеянные и разорванные облака, а также сплошную облачность, которые частично или полностью препятствует обзору поверхности земли
|
+
|
+
|
+
|
+
|
|
|
12.g.6
|
Эффект слоя облачности с настраиваемыми верхней и нижней кромками, позволяющий воспроизводить полное блокирование обзора поверхности земли.
|
+
|
||||
|
12.g.7
|
Постепенный выход из облаков и переход к видимости окружающей обстановки и дальности видимости на ВПП, определяемой как до 10% от соответствующей нижней или верхней границы облаков, 6,1 м <= переходной слой <= 61 м. Эффекты облачности следует проверять на высоте от 600 м и ниже над уровнем аэродрома или посадочной площадки для вертолетов, и в радиусе 16 км от аэропорта или посадочной площадки для вертолетов. В полной мере должны отображаться эффекты перехода при входе и выходе из облаков при достижении нижней или верхней кромки облачности, которые вводятся с РМИ
|
+
|
+
|
+
|
+
|
|
|
12.g.8
|
Видимость и дальность видимости на ВПП измеряются в единицах расстояния. Видимость и дальность следует проверять на высоте от 600 м и ниже относительно уровня аэродрома или посадочной площадки для вертолетов и в радиусе 16 км от аэродрома или посадочной площадки для вертолетов
|
+
|
+
|
+
|
+
|
+
|
|
12.g.9
|
Неоднородный туман создает эффект изменяющейся дальности видимости на ВПП. Самая малая дальность должна соответствовать значению, заданному с РМИ.
|
+
|
+
|
+
|
||
|
12.g.10
|
Влияние тумана на видимость на аэродроме или посадочной площадке для вертолетов
|
+
|
+
|
+
|
+
|
|
|
12.g.11
|
Влияние собственных огней вертолета в условиях ограниченной видимости, отражение бликов, включая посадочные огни, прожекторы, проблесковые огни и маяки
|
+
|
+
|
+
|
+
|
|
|
12.g.12
|
Признаки ветра для создания эффекта метели или песчаной бури на поверхности сухой ВПП, рулежной дорожки или посадочной площадки должны вводиться с РМИ
|
+
|
+
|
+
|
||
|
12.g.13
|
Эффекты частичной потери видимости по причине воздействия потоков воздуха от НВ, вызываемые присутствующими в них частицами травы, грязи, воды
|
+
|
+
|
+
|
+
|
|
|
12.g.14
|
Эффекты белой пелены или частичного затемнения, вызываемые рециркуляцией скоса потока НВ на различные поверхности (снег, песок, грязь, вода, трава), включая эффекты снижения видимости на высоте относительно земли, равной примерно половине диаметра НВ
|
+
|
+
|
+
|
+
|
|
|
12.g.15
|
Эффекты воздействия ветра и волнения на трехмерной модели моря (океана) моделируются комплексно, что должно включать:
потоки ветра;
волнение моря (океана) в диапазоне от 0 до 6 баллов;
состояние кораблей или других движущихся судов должно соответствовать волнению моря
|
+
|
+
|
+
|
+
|
|
|
12.g.16
|
Эффект качающихся деревьев на площадках ограниченных размеров
|
+
|
+
|
+
|
||
|
12.g.17
|
Эффекты выпадения осадков (дождь, град, снег)
|
+
|
+
|
+
|
+
|
|
|
13
|
Акселерационные и вибрационные эффекты
|
|||||
|
13.a
|
Эффекты руления, воздействия поперечного и путевого движения, возникающие в результате входных сигналов управления и торможения
|
+
|
+
|
|||
|
13.b
|
Эффекты тряски при движении по ВПП, отклонения амортизаторов, путевой скорости, неровностей ВПП, огней осевой линии ВПП, загрязнения ВПП, а также в зависимости от характерных особенностей рулежной дорожки
|
+
|
+
|
|||
|
13.c
|
Сопротивление трения при полозковом шасси вертолета
|
+
|
+
|
+
|
+
|
+
|
|
13.d
|
Набор высоты с поступательной скоростью (включая эффект поперечного потока)
|
+
|
+
|
+
|
+
|
+
|
|
Процедура: из режима устойчивого висения в зоне влияния земли начать ускорение вперед. При прохождении через диапазон эффективной подъемной силы от поступательного движения, указанный эффект на некоторых вертолетах может проявляться в увеличении угла тангажа, вертикальной скорости набора высоты и временного возрастания уровня вибрации (в некоторых случаях, эта вибрация может быть заметно выражена). Этот эффект повторится при замедлении в соответствующем диапазоне скоростей. Угол тангажа и вертикальная скорость будут в этом случае уменьшаться, но произойдет похожее временное возрастание уровня вибрации
|
||||||
|
13.e
|
Удары или тряска, связанные с шасси
|
+
|
+
|
|||
|
Процедура: выполнить штатный взлет, обращая особое внимание на удары, которые могли быть заметны из-за максимального разжатия амортизаторов после взлета. При выпуске или уборке шасси удары в системе подвижности можно почувствовать, когда шасси фиксируется в конечном положении
|
||||||
|
Задействовать шасси. Проверить, что акселерационные эффекты от тряски соответствуют тряске на реальном вертолете
|
||||||
|
13.f
|
Нарушение соконусности лопастей НВ и (или) они разбалансированы, включая условия обледенения
|
+
|
+
|
+
|
+
|
+
|
|
13.g
|
Отказ динамического гасителя вибрации или подобной системы
|
+
|
+
|
+
|
||
|
13.h
|
Неисправность привода рулевого винта (вибрации)
|
+
|
+
|
+
|
+
|
+
|
|
13.i
|
Типовые эффекты после приземления Процедура: выполнить несколько приземлений с различными скоростями снижения, с режима висения и с послепосадочным пробегом. Проверить, что акселерационные эффекты от ударов при приземлении для каждой скорости снижения соответствуют реальному вертолету
|
+
|
+
|
|||
|
13.j
|
Разрушение пневматиков
|
+
|
+
|
|||
|
13.k
|
Эффекты неисправности и повреждения двигателя
|
+
|
+
|
+
|
+
|
+
|
|
13.l
|
Удар хвостовой частью
|
+
|
+
|
|||
|
13.m
|
Попадание в вихревое кольцо (режим вихревого кольца)
|
+
|
+
|
+
|
||
|
13.n
|
Срыв потока на отступающей лопасти
|
+
|
+
|
|||
|
13.o
|
Вибрации при больших скоростях
|
+
|
+
|
+
|
||
|
13.p
|
Тряска в результате атмосферных возмущений
|
+
|
+
|
|||
|
14
|
Акустическая система.
|
|||||
|
Проверки должны выполняться при включенных системах подвижности и вибрации, кондиционирования и вентиляции воздуха
|
||||||
|
Акустическая модель должна предусматривать возможность моделирования звуков погодных условий и природных явлений, включающие звуки различной интенсивности осадков (дождь, град), раскатов грома (грозы), ветра, смерч, тайфун, вулканические осадки и выбросы лавы, камнепада, сель, звук прибрежных волн и цунами
|
+
|
+
|
+
|
|||
|
14.a
|
Требования по направленности звука
|
+
|
+
|
+
|
||
|
14.b
|
Существенные шумы, создаваемые системами вертолета и воспринимаемые пилотом во время выполнения обычных полетов, которые сопоставимы с уровнем шума зарегистрированным в протоколах измерений и входящих в ПИД
|
+
|
+
|
+
|
||
|
14.c
|
Существенные шумы в кабине экипажа вертолета и шумы, в результате действий пилота создаваемые системами самолета и воспринимаемые пилотом во время выполнения обычных полетов, которые сопоставимы с уровнем шума зарегистрированным в протоколах измерений и входящих в ПИД
|
+
|
+
|
+
|
||
|
14.d
|
Существенные шумы в кабине экипажа вертолета и шумы, в результате действий пилота создаваемые системами самолета и воспринимаемые пилотом во время выполнения обычных полетов, которые сопоставимы с уровнем шума зарегистрированным в протоколах измерений и входящих в ПИД
|
+
|
+
|
+
|
+
|
+
|
|
14.e
|
Нештатные режимы выполнения полета, для которых имеются соответствующие данные по акустическим шумам при неисправностях двигателя, винтов, трансмиссии, шасси, повреждении пневматиков
|
+
|
+
|
+
|
+
|
+
|
|
14.f
|
Звук удара при приземлении вертолета в необычном положении или в условиях превышения ограничений
|
+
|
+
|
+
|
+
|
+
|
|
15
|
Специальные эффекты
|
|||||
|
15.a
|
Эффекты обледенения планера, двигателя и винтов
|
+
|
+
|
|||
|
Процедура: при моделировании полета на тренажере в исходной конфигурации на номинальной высоте и при крейсерской скорости с включенным автопилотом и выключенной антиобледенительной системой двигателей и лопастей НВ необходимо активировать возможность образования обледенения с соответствующей скоростью, позволяющей осуществлять мониторинг за реакцией систем и тренажера. Признаками обледенения являются следующие: увеличение веса, увеличение мощности для поддержания горизонтального полета, снижение скорости, изменения угла тангажа, изменения в показаниях приборов, контролирующих работу двигателей (кроме различий, которые вызваны изменением скорости), и изменения показаний приемника воздушного давления или признаки разбалансировки и несоконусности НВ. Следует независимо активировать систему обогрева, противообледенительную систему и систему удаления льда. Должны быть заметны правильные эффекты действия этих систем и постепенное возвращение имитируемого вертолета к выполнению нормального полета
|
||||||
|
15.b
|
Спектр воздушных потоков и соответствующие эффекты, связанные с крупными сооружениями
|
+
|
+
|
+
|
||
|
15.c
|
Специальные атмосферные эффекты, которые могут потребоваться для специальных программ подготовки: арктический туман над полыньей, нисходящие воздушные потоки, влияние гор, турбулентность вблизи газоотводных труб на нефтяных вышках, вихревые следы и эффекты скоса потока от других ВС
|
+
|
+
|
+
|
||
|
16
|
Система управления воздушным движением (УВД)
|
|||||
|
Все перечисленные ниже функции могут выполняться непосредственно инструктором или программироваться с РМИ с использованием возможностей системы моделирования окружающей обстановки УВД
|
||||||
|
16.a
|
Автоматическая передача метеосводок
|
+
|
+
|
+
|
+
|
+
|
|
16.b
|
Линия связи коллективного пользования (фоновые переговоры).
|
+
|
||||
|
16.c
|
Фразеология
|
+
|
||||
|
16.d
|
Определение частот УВД, соответствующих конкретному этапу полета
|
+
|
||||
|
16.e
|
Переход инструктора на ручное управление системой УВД
|
+
|
+
|
+
|
+
|
+
|
|
17
|
Рабочее место инструктора (РМИ)
|
|||||
|
17.a
|
Изменение положений
|
|||||
|
Изменение положений должны заканчиваться на режиме балансировки при соответствующей скорости и конфигурации для данной точки
|
||||||
|
17.a.1
|
Парковочное место вертолета
|
+
|
+
|
+
|
+
|
+
|
|
17.a.2
|
Положение для взлета
|
+
|
+
|
+
|
+
|
+
|
|
17.a.3
|
Положение для захода на посадку (как минимум, 3 расстояния, а именно 1,8, 5,5 и 9 км от торца ВПП или посадочной площадки для вертолетов)
|
+
|
+
|
+
|
+
|
+
|
|
17.a.4
|
Находящаяся на возвышении поверхность (крыша здания, морская нефтяная платформа)
|
+
|
+
|
+
|
||
|
17.a.5
|
Посадочная площадка ограниченных размеров
|
+
|
+
|
+
|
||
|
17.a.6
|
Посадочная площадка с уклоном
|
+
|
+
|
+
|
||
|
17.b
|
Перенастройка
|
|||||
|
17.b.1
|
Система
|
+
|
+
|
+
|
+
|
+
|
|
17.b.2
|
Температура
|
+
|
+
|
+
|
+
|
+
|
|
17.b.3
|
Жидкость и компоненты
|
+
|
+
|
+
|
+
|
+
|
|
17.c
|
Окружающая обстановка
|
|||||
|
17.c.1
|
Установка метеоусловий
|
|||||
|
17.c.1.a
|
Облачность и видимость неограниченны
|
+
|
+
|
+
|
+
|
+
|
|
17.c.1.b
|
Облачность и видимость в норме
|
+
|
+
|
+
|
+
|
+
|
|
17.c.1.c
|
ПВП
|
+
|
+
|
+
|
+
|
+
|
|
17.c.1.d
|
Минимумы неточного захода на посадку
|
+
|
+
|
+
|
+
|
+
|
|
17.c.1.e
|
Минимумы точного захода на посадку (категории I и категории II, минимумы EFVS)
|
+
|
+
|
+
|
+
|
+
|
|
17.c.2
|
Визуальные эффекты
|
|||||
|
17.c.2.a
|
Время суток (день, сумерки или рассвет, ночь)
|
+
|
+
|
+
|
+
|
+
|
|
17.c.2.b
|
Облачность (нижняя кромка, верхняя граница, слои, виды, плотность)
|
+
|
+
|
+
|
+
|
+
|
|
17.c.2.c
|
Видимость в км или в статутных милях
|
+
|
+
|
+
|
+
|
+
|
|
17.c.2.d
|
Дальность видимости на ВПП в метрах
|
+
|
+
|
+
|
+
|
+
|
|
17.c.2.e
|
Специальные эффекты (осадки, грозы, метель, песчаная буря)
|
+
|
+
|
+
|
+
|
|
|
17.c.2.f
|
Песок, пыль, снег, скос потока воды, эффект рециркуляции (включенное и выключенное состояние)
|
+
|
+
|
+
|
+
|
|
|
17.c.2.g
|
Волнение моря (от 0 до 6 баллов)
|
+
|
+
|
+
|
+
|
|
|
17.d
|
Скорость и направление ветра
|
|||||
|
17.d.1
|
Приземный
|
+
|
+
|
+
|
+
|
+
|
|
17.d.2
|
Промежуточные уровни
|
+
|
+
|
+
|
+
|
|
|
17.d.3
|
Типичный градиент
|
+
|
+
|
+
|
||
|
17.d.4
|
Порывы с соответствующими изменениями курса и скорости
|
+
|
+
|
+
|
+
|
+
|
|
17.d.5
|
Турбулентность
|
+
|
+
|
+
|
+
|
+
|
|
17.e
|
Температура - приземная
|
+
|
+
|
+
|
+
|
+
|
|
17.f
|
Атмосферное давление (QNH, QFE)
|
+
|
+
|
+
|
+
|
+
|
|
17.g
|
Аэропорт (вертодром)
|
|||||
|
17.g.1
|
Включает выбор действующей ВПП или посадочной площадки
|
+
|
+
|
+
|
+
|
+
|
|
17.g.2
|
Управление освещением аэропорта (вертодрома)
|
+
|
+
|
+
|
+
|
+
|
|
17.g.3
|
Заданное положение аэропорта (вертодрома) (взлет, заход на посадку, нефтяная платформа)
|
+
|
+
|
+
|
+
|
+
|
|
17.g.4
|
Состояние посадочной поверхности (неровная, гладкая, покрытая льдом, влажная)
|
+
|
+
|
+
|
+
|
|
|
17.g.5
|
Динамические эффекты, включая движение на земле и в воздухе
|
+
|
+
|
+
|
+
|
|
|
17.h
|
Конфигурация вертолета (топливо, вес, центр тяжести)
|
|||||
|
17.h.1
|
Взлетная масса
|
+
|
+
|
+
|
+
|
+
|
|
17.h.2
|
Заправка топлива
|
+
|
+
|
+
|
+
|
+
|
|
17.h.3
|
Полезная нагрузка
|
+
|
+
|
+
|
+
|
+
|
|
17.h.4
|
Центр тяжести
|
+
|
+
|
+
|
+
|
+
|
|
17.h.5
|
Состояние систем вертолета и управление ими
|
+
|
+
|
+
|
+
|
+
|
|
17.h.6
|
Функции наземного обслуживающего персонала
|
+
|
+
|
+
|
+
|
+
|
|
17.i
|
Система управления полетом. Перезагрузка запрограммированных данных, если этому не препятствует установленное оборудование
|
+
|
+
|
+
|
||
|
17.j
|
Регистрация и построение графиков (взлет и заход на посадку)
|
+
|
+
|
+
|
+
|
+
|
|
17.k
|
Неисправности вертолета (ввод и удаление)
|
+
|
+
|
+
|
+
|
+
|
|
17.l
|
Управление звуками (включение, выключение, регулировка; индикация при установке уровня звука, который отличается от утвержденного)
|
+
|
+
|
+
|
+
|
+
|
|
17.m
|
Система подвижности (включение, выключение, аварийная отключение)
|
+
|
+
|
|||
|
17.n
|
Система управления нагрузкой (включение, выключение, аварийная отключение)
|
+
|
+
|
+
|
+
|
+
|
|
17.o
|
Система вибрации (включение, выключение, аварийная отключение)
|
+
|
+
|
+
|
+
|
+
|
|
17.p
|
Главный или аварийный выключатель питания тренажера
|
+
|
+
|
+
|
+
|
+
|
|
17.q
|
Положение кресел наблюдателя (регулировка, система принудительного ограничения движения) (для тренажера с системой подвижности)
|
+
|
+
|
|||
|
17.r
|
Связь инструктора или наблюдателя(ей) с экипажем
|
+
|
+
|
+
|
+
|
+
|
|
17.s
|
Пауза имитации работы (перенастройка) тренажера
|
|||||
|
17.s.1
|
Пауза работы тренажера по моделированию всех систем ВС и окружающей обстановки
|
+
|
+
|
+
|
+
|
+
|
|
17.s.2
|
Пауза при моделировании полета или задачи
|
+
|
+
|
+
|
+
|
+
|
|
17.s.3
|
Фиксирование пространственного положения ВС
|
+
|
+
|
+
|
+
|
+
|
|
17.s.4
|
Пауза моделирования выработки топлива
|
+
|
+
|
+
|
+
|
+
|
|
17.s.5
|
Управление путевой скоростью
|
+
|
+
|
+
|
+
|
+
|
|
17.s.6
|
Восстановление параметров стандартной атмосферы
|
+
|
+
|
+
|
+
|
+
|
Приложение N 3
к Федеральным авиационным правилам
"Требования к тренажерным устройствам
имитации полета, применяемым в целях
подготовки и контроля профессиональных
навыков членов летных экипажей
гражданских воздушных судов",
утвержденным приказом Минтранса России
от 12 июля 2019 г. N 229
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
|
АЗС
|
-
|
автомат защиты сети
|
|
БРЭО
|
-
|
бортовое радиоэлектронное оборудование
|
|
ВПП
|
-
|
взлетно-посадочная полоса
|
|
ВС
|
-
|
воздушное судно
|
|
ВСУ
|
-
|
вспомогательная силовая установка
|
|
ЗОС
|
-
|
заявление о соответствии
|
|
ИЛС
|
-
|
индикатор на лобовом стекле
|
|
КПД
|
-
|
коэффициент полезного действия
|
|
НВ
|
-
|
несущий винт
|
|
ОВЧ
|
-
|
очень высокая частота
|
|
ОНВ
|
-
|
очки ночного виденья
|
|
ПВП
|
-
|
правила визуального полета
|
|
ПНВ
|
-
|
правильные направление и величина
|
|
ППП
|
-
|
полет по приборам
|
|
РВ
|
-
|
рулевой винт
|
|
РЛС
|
-
|
радиолокационная система
|
|
РМИ
|
-
|
рабочее место инструктора
|
|
РСНВ
|
-
|
режим самовращения несущего винта (авторатация)
|
|
РУД
|
-
|
рычаг управления двигателем
|
|
СМУ
|
-
|
сложные метеорологические условия
|
|
Т
|
-
|
подготовка, которая засчитывается как подготовка к выдаче свидетельства, квалификационной отметки или к присвоению квалификации, но не является завершенной подготовкой, поскольку характеристики используемого тренажера не отвечают требованиям к подготовке.
|
|
ТР
|
-
|
подготовка, которая засчитывается как подготовка для выдачи свидетельства, получения квалификационной отметки, для присвоения квалификации. Уровни адекватности всех характеристик тренажера должны соответствовать типу тренажера, требуемому для подготовки и такой тренажера может применяется для контроля навыков
|
|
УВД
|
-
|
управление воздушным движением
|
|
ACARS
|
-
|
двусторонняя система связи между экипажем ВС и диспетчером УВД
|
|
ASOS
|
-
|
автоматическая система наблюдения за поверхностью (АСНВ)
|
|
ATIS
|
-
|
служба автоматической передачи информации в районе аэродрома
|
|
ATN
|
-
|
сеть авиационной связи
|
|
ATPL
|
-
|
свидетельство линейного пилота
|
|
AWOS
|
-
|
станция автоматического наблюдения за погодой
|
|
baro-VNAV
|
-
|
барометрическая вертикальная навигация
|
|
CAVOK
|
-
|
кодовое слово, обозначающее хорошую погоду
|
|
CFIT
|
-
|
столкновение исправного воздушного судна с землей
|
|
CPL
|
-
|
свидетельство коммерческого пилота
|
|
CR
|
-
|
квалификационная отметка о классе
|
|
CQ
|
-
|
поддержание квалификационного уровня
|
|
DME
|
-
|
дальномерное оборудование
|
|
DGPS
|
-
|
дифференциальная глобальная система определения местоположения
|
|
EFVS
|
-
|
бортовая система технического зрения с расширенными возможностями визуализации
|
|
EGPWS
|
-
|
усовершенствованная система предупреждения о близости земли
|
|
EPR
|
-
|
степень повышения давления в двигателе
|
|
ETL
|
-
|
скорость, на которой отмечается эффект, связанный с переходом от висения к горизонтальному полету
|
|
FANS
|
-
|
система навигационного прогноза
|
|
FMS
|
-
|
система управления полетом
|
|
GBAS
|
-
|
наземная система функционального дополнения с широкой зоной действия
|
|
GLS
|
-
|
система посадки по системе GBAS
|
|
GNSS
|
-
|
глобальная навигационная спутниковая система
|
|
GPS
|
-
|
глобальная система определения местоположения
|
|
GPWS
|
-
|
система предупреждения об опасном сближении с землей
|
|
HAPI
|
-
|
указатель траектории захода на посадку вертолета
|
|
HTAWS
|
-
|
система раннего предупреждения приближения вертолета к земле
|
|
ILS
|
-
|
система посадки по приборам
|
|
IO
|
-
|
проводимые эксплуатантом первоначальная подготовка и проверки
|
|
IR
|
-
|
подготовка пилотов с целью выдачи отметки о праве на полеты по приборам
|
|
IR (I, R)
|
-
|
квалификационная отметка о праве на полеты по приборам (первоначальное получение, подтверждение)
|
|
LOC/LLZ
|
-
|
курсовой радиомаяк системы посадки по приборам
|
|
LOC-BC
|
-
|
курс по обратному лучу курсового радиомаяка
|
|
LOS
|
-
|
ограниченный участок с препятствиями или имитация условий, приближенных к реальным (в зависимости от контекста)
|
|
MPL
|
-
|
свидетельство пилота многочленного экипажа:
|
|
MLS
|
-
|
микроволновая система посадки
|
|
Nr
|
-
|
частота вращения несущего винта (обороты в минуту), выражается в процентах от максимального или фактического значения
|
|
NOTAR
|
-
|
система NOTAR (без хвостового винта)
|
|
OFS
|
-
|
сектор, свободный от препятствий
|
|
PAPI
|
-
|
указатель траектории точного захода на посадку
|
|
PINS
|
-
|
точка в пространстве
|
|
PPL
|
-
|
свидетельства частного пилота
|
|
Re
|
-
|
восстановление навыков пилотирования
|
|
RO
|
-
|
проводимые эксплуатантом переподготовка и проверки (профподготовка)
|
|
RL
|
-
|
подготовка и проверки для подтверждения свидетельства
|
|
QFE
|
-
|
установка высотомера по атмосферному давлению на уровне превышения конкретной точки
|
|
QNH
|
-
|
установка высотомера по атмосферному давлению, приведенному к уровню моря
|
|
RNAV
|
-
|
зональная навигация
|
|
RNP
|
-
|
требуемые навигационные характеристики
|
|
RNP APCH
|
-
|
заход на посадку на основе RNP с требуемым разрешением
|
|
RVR
|
-
|
дальность видимости на ВПП
|
|
SBAS
|
-
|
система зональной навигации
|
|
SDF
|
-
|
упрощенный курсовой маяк
|
|
SPL
|
-
|
уровень звукового давления
|
|
SPL RMS
|
-
|
среднеквадратичное значение уровня звукового давления
|
|
TR (I, R)
|
-
|
подготовка и проверки для получения квалификационной отметки о типе (первоначальное получение, подтверждение)
|
|
STOL
|
-
|
относящееся к самолетам короткого взлета и посадки
|
|
TACAN
|
-
|
система ближней аэронавигации
|
|
TCAS
|
-
|
система выдачи информации о воздушном движении и предупреждения столкновений
|
|
TDP
|
-
|
точка принятия решения о взлете
|
|
TR
|
-
|
подготовка пилотов с целью выдачи отметки о праве полета на типе ВС
|
|
VH
|
-
|
наивыгоднейшая скорость
|
|
VASIS
|
-
|
система визуальной индикации глиссады
|
|
VNAV
|
-
|
система вертикальной аэронавигации
|
|
VOR
|
-
|
всенаправленный ОВЧ-радиомаяк
|